Das könnte Ihnen auch gefallen
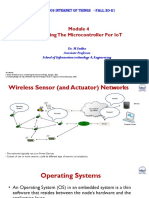
- CSE 3009 Internet of Things - FALL 20-21 Module 4 Programming The MicrocontrollerDokument76 SeitenCSE 3009 Internet of Things - FALL 20-21 Module 4 Programming The Microcontrollerayushthegreat123Noch keine Bewertungen
- CSE 3009 Internet of Things - Programming The MicrocontrollerDokument76 SeitenCSE 3009 Internet of Things - Programming The Microcontrollerayushthegreat123Noch keine Bewertungen
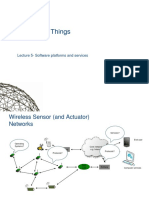
- Week 9 - Software Plateforms and ServcesDokument50 SeitenWeek 9 - Software Plateforms and Servcesmr nNoch keine Bewertungen
- IoT Software Platforms and ServicesDokument50 SeitenIoT Software Platforms and ServicesPartha ParidaNoch keine Bewertungen
- CPE109 Module 1Dokument98 SeitenCPE109 Module 1Hakdog HakdogNoch keine Bewertungen
- Chapter 1Dokument68 SeitenChapter 1Wasie ManayeNoch keine Bewertungen
- Contiki - A Lightweight and Flexible Operating System For Tiny Networked SensorsDokument9 SeitenContiki - A Lightweight and Flexible Operating System For Tiny Networked SensorsRaja MadhuvanthiNoch keine Bewertungen
- Embedded Systems ProjectDokument34 SeitenEmbedded Systems Projectmrs.mohmed95% (59)
- 01F Syscalls PDFDokument23 Seiten01F Syscalls PDFGurjar DevyaniNoch keine Bewertungen
- Contiki OS for Tiny Networked SensorsDokument8 SeitenContiki OS for Tiny Networked SensorsFogusNoch keine Bewertungen
- Linux Internals and NetworkingDokument177 SeitenLinux Internals and NetworkingNguyễn Mạnh100% (1)
- Motes, nesC, and TinyOS overviewDokument17 SeitenMotes, nesC, and TinyOS overviewp daNoch keine Bewertungen
- CH 1 IntroDokument7 SeitenCH 1 IntroChawki WikiNoch keine Bewertungen
- Embedded Systemppt2343Dokument48 SeitenEmbedded Systemppt2343Rishabh SagarNoch keine Bewertungen
- Programming Memory - Constrained Networked Embedded SystemsDokument222 SeitenProgramming Memory - Constrained Networked Embedded Systemsamina.kodectaNoch keine Bewertungen
- A JVM Does: That???Dokument42 SeitenA JVM Does: That???rahulsinnerNoch keine Bewertungen
- Embedded Systems Introduction: Hardware, Software, Design ChallengesDokument39 SeitenEmbedded Systems Introduction: Hardware, Software, Design ChallengesRajeev RawalNoch keine Bewertungen
- Sistemas de Sensores en Red Lectura8Dokument10 SeitenSistemas de Sensores en Red Lectura8marchelo_cheloNoch keine Bewertungen
- Chapter (3) Real Time Hardware and Software Architecture (3.1) - Real Time Hardware ArchitectureDokument5 SeitenChapter (3) Real Time Hardware and Software Architecture (3.1) - Real Time Hardware ArchitectureNaveed KhowajaNoch keine Bewertungen
- CH6 - Computer Abstractions and TechnologyDokument69 SeitenCH6 - Computer Abstractions and Technologygiabaoharry2005Noch keine Bewertungen
- Lecture Note - Embedded System and MicrocontrollerDokument29 SeitenLecture Note - Embedded System and MicrocontrollerIkechukwu OkaforNoch keine Bewertungen
- 14S4003 Introduction To Embedded System: Semester 1 2020/2021Dokument19 Seiten14S4003 Introduction To Embedded System: Semester 1 2020/2021Yohana Crisma LimbongNoch keine Bewertungen
- Chapter One IntroductionDokument7 SeitenChapter One Introductionyohannes assefaNoch keine Bewertungen
- Lecture Parallel ComputingDokument6 SeitenLecture Parallel ComputingChristopher AdvinculaNoch keine Bewertungen
- Operating Systems Lecture on Microkernels, Modules, and Hybrid KernelsDokument18 SeitenOperating Systems Lecture on Microkernels, Modules, and Hybrid KernelsParth JainNoch keine Bewertungen
- Real Time Linux Programming Mark VeltzerDokument20 SeitenReal Time Linux Programming Mark VeltzerMark VeltzerNoch keine Bewertungen
- Unit 2 - Hardware and SoftwareDokument18 SeitenUnit 2 - Hardware and SoftwareCLARA D SOUZA THOMASNoch keine Bewertungen
- CS326 Parallel and Distributed Computing: SPRING 2021 National University of Computer and Emerging SciencesDokument47 SeitenCS326 Parallel and Distributed Computing: SPRING 2021 National University of Computer and Emerging SciencesNehaNoch keine Bewertungen
- Riding The Next Wave of Embedded Multicore Processors: - Maximizing CPU Performance in A Power-Constrained WorldDokument36 SeitenRiding The Next Wave of Embedded Multicore Processors: - Maximizing CPU Performance in A Power-Constrained Worldapi-27099960Noch keine Bewertungen
- Parallel ComputingDokument32 SeitenParallel ComputingKhushal BisaniNoch keine Bewertungen
- Advantages and Disadvantages of Embedded JavaDokument20 SeitenAdvantages and Disadvantages of Embedded Javacharles kiarieNoch keine Bewertungen
- The Contiki Operating System: Jack NosekDokument13 SeitenThe Contiki Operating System: Jack NosekguruannamalaiNoch keine Bewertungen
- Lecture10 Real-Time and Embedded v2Dokument36 SeitenLecture10 Real-Time and Embedded v2Enrique ContrerasNoch keine Bewertungen
- 1 2/21/2022 Esd Unit 1Dokument62 Seiten1 2/21/2022 Esd Unit 1Mohammad AshrafNoch keine Bewertungen
- CSCI-332 Week1 2Dokument19 SeitenCSCI-332 Week1 2Dokin NikodNoch keine Bewertungen
- Embedded System - Word FileDokument5 SeitenEmbedded System - Word FileJalpa DesaiNoch keine Bewertungen
- Null 1Dokument9 SeitenNull 1yasodha KumariNoch keine Bewertungen
- Iot Unit 2Dokument87 SeitenIot Unit 2SRHNoch keine Bewertungen
- Embedded System In Industrial View: Industrial Embedded SystemsDokument36 SeitenEmbedded System In Industrial View: Industrial Embedded SystemsPriya KosuriNoch keine Bewertungen
- Week1 - Parallel and Distributed ComputingDokument46 SeitenWeek1 - Parallel and Distributed ComputingA NNoch keine Bewertungen
- Evolution of The Windows Kernel ArchitectureDokument30 SeitenEvolution of The Windows Kernel ArchitecturejpaulpraNoch keine Bewertungen
- Introduction to Parallel Computing: Breaking Problems into PiecesDokument6 SeitenIntroduction to Parallel Computing: Breaking Problems into PiecesChristopher AdvinculaNoch keine Bewertungen
- Characteristics of Embedded System: Basic Software Techniques For Embedded ApplicationsDokument31 SeitenCharacteristics of Embedded System: Basic Software Techniques For Embedded ApplicationsHakdog HakdogNoch keine Bewertungen
- PAP Module 1Dokument67 SeitenPAP Module 1Punya PalitNoch keine Bewertungen
- Introduction to Operating System Components and EvolutionDokument10 SeitenIntroduction to Operating System Components and EvolutionRediet BadieNoch keine Bewertungen
- Real Time Linux SlideDokument12 SeitenReal Time Linux SlideSimmi JoshiNoch keine Bewertungen
- Week5 IoT SoftwareDokument37 SeitenWeek5 IoT SoftwareHector TiboNoch keine Bewertungen
- Chapter # 1 COALDokument24 SeitenChapter # 1 COALShahzael MughalNoch keine Bewertungen
- 2 RtosDokument38 Seiten2 RtosRaghu TejaNoch keine Bewertungen
- Rush Collision Prevention in Railways Major DocumentDokument77 SeitenRush Collision Prevention in Railways Major Document18E3457 MukundiniNoch keine Bewertungen
- Utf-8 Iit DocumentationDokument44 SeitenUtf-8 Iit Documentationsudharsan2020Noch keine Bewertungen
- Computer Architecture Notes For ENGG1811Dokument14 SeitenComputer Architecture Notes For ENGG18112685866Noch keine Bewertungen
- Lecture1 - Introduction To Embbeded System DesignDokument29 SeitenLecture1 - Introduction To Embbeded System DesignĐức Anh CNoch keine Bewertungen
- Acknowledgement: - The Bulk of The Material in This Lecture Is Adapted FromDokument7 SeitenAcknowledgement: - The Bulk of The Material in This Lecture Is Adapted FromSyed Ovais AhmedNoch keine Bewertungen
- Embedded Systems: C.Sathyanathan J.Siddarth 9003841021Dokument22 SeitenEmbedded Systems: C.Sathyanathan J.Siddarth 9003841021Srec SamuthayamNoch keine Bewertungen
- Glossary+of+terms IBCSDokument13 SeitenGlossary+of+terms IBCSEros Munoz JimenezNoch keine Bewertungen
- SE - ImplementationDokument66 SeitenSE - ImplementationAziz KhanNoch keine Bewertungen
- Open-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsVon EverandOpen-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsBewertung: 3 von 5 Sternen3/5 (1)
- Node.js, JavaScript, API: Interview Questions and AnswersVon EverandNode.js, JavaScript, API: Interview Questions and AnswersBewertung: 5 von 5 Sternen5/5 (1)
- Application Configuration REC670 TestDokument22 SeitenApplication Configuration REC670 TestmaheshknmNoch keine Bewertungen
- Microprocessor Assignment on 8085 Architecture, Instructions, and ProgrammingDokument2 SeitenMicroprocessor Assignment on 8085 Architecture, Instructions, and ProgrammingM B KalikotayNoch keine Bewertungen
- 2022 Nav Price List - Lista de PreciosDokument2 Seiten2022 Nav Price List - Lista de PreciosFrancisco MoragaNoch keine Bewertungen
- Avr h128 1Dokument2 SeitenAvr h128 1Victor Hugo Garcia de CamposNoch keine Bewertungen
- Automate NAIS FP1-C27 Machine F57 NEW PDFDokument280 SeitenAutomate NAIS FP1-C27 Machine F57 NEW PDFMohamed Ben ArbiaNoch keine Bewertungen
- Metastability and Clock Domain Crossing: IN3160 IN4160Dokument30 SeitenMetastability and Clock Domain Crossing: IN3160 IN4160kumarNoch keine Bewertungen
- Ec8791 Erts QBDokument8 SeitenEc8791 Erts QBRajarajeswari KannanNoch keine Bewertungen
- A Brief Introduction of Micro Controllers 8051Dokument64 SeitenA Brief Introduction of Micro Controllers 8051Pradeep Varma0% (1)
- Propsoal LaptopDokument6 SeitenPropsoal LaptopDipti RawalNoch keine Bewertungen
- Windows Device Manager DevicesDokument16 SeitenWindows Device Manager DevicesDaifuku17Noch keine Bewertungen
- DLP Projectors ExplainedDokument1 SeiteDLP Projectors Explainedaahmed2001Noch keine Bewertungen
- JAIPUR NATIONAL UNIVERSITY INTERNAL ASSIGNMENTDokument15 SeitenJAIPUR NATIONAL UNIVERSITY INTERNAL ASSIGNMENTGhanshyam Sharma33% (3)
- A51 Assembler A251 Assembler: Macro Assemblers For The 8051 and MCS 251 MicrocontrollersDokument245 SeitenA51 Assembler A251 Assembler: Macro Assemblers For The 8051 and MCS 251 Microcontrollersbinhnhi0007Noch keine Bewertungen
- Setup Whole IFRDokument410 SeitenSetup Whole IFRjaaritNoch keine Bewertungen
- ModuleDokument14 SeitenModulePablo SariNoch keine Bewertungen
- Tentative CBLMDokument27 SeitenTentative CBLMRosavilla LaciaNoch keine Bewertungen
- Student Eoc 1 Sesi 1 2022 2023Dokument4 SeitenStudent Eoc 1 Sesi 1 2022 2023Amzar ShukriNoch keine Bewertungen
- Average of Array Using 8086Dokument84 SeitenAverage of Array Using 8086Rajalakshmi SNoch keine Bewertungen
- 1.0 1.1 1.2 1.3Dokument197 Seiten1.0 1.1 1.2 1.3satwik_thakkarNoch keine Bewertungen
- Steve Jobs: PresentationDokument28 SeitenSteve Jobs: Presentationanon_878555406Noch keine Bewertungen
- CSCX310-510 Study GuideDokument135 SeitenCSCX310-510 Study GuideAnonymous ke8I7S3Noch keine Bewertungen
- 362.00 Nvidia Control Panel Quick Start GuideDokument33 Seiten362.00 Nvidia Control Panel Quick Start GuideindoexchangeNoch keine Bewertungen
- Tugas English Conversation: Nama: Ari Akbar NIM: 2019310032Dokument7 SeitenTugas English Conversation: Nama: Ari Akbar NIM: 2019310032Agna Annisa RahimNoch keine Bewertungen
- VxVM Troubleshooting Guide: Resolve Volume, Plex, Disk IssuesDokument14 SeitenVxVM Troubleshooting Guide: Resolve Volume, Plex, Disk IssuescresmakNoch keine Bewertungen
- Manual Shuttle AV40V12Dokument81 SeitenManual Shuttle AV40V12Infonova Rute100% (1)
- Three Generations of SCADA System Architectures - EEPDokument7 SeitenThree Generations of SCADA System Architectures - EEPgaurav sharmaNoch keine Bewertungen
- Latitude 9p0 Datasheet USDokument2 SeitenLatitude 9p0 Datasheet USGuillermo IbarraNoch keine Bewertungen
- Webdyn Modbus DatasheetDokument2 SeitenWebdyn Modbus DatasheetAnand RajNoch keine Bewertungen
- CMControl P App Article Touch and Test OMICRON Magazine 2013 ENUDokument2 SeitenCMControl P App Article Touch and Test OMICRON Magazine 2013 ENUTayyab ZubairNoch keine Bewertungen
- HP Compaq LA2205wg PDFDokument8 SeitenHP Compaq LA2205wg PDFJerson A. Encarnacion ManceboNoch keine Bewertungen