Das könnte Ihnen auch gefallen
- Ch12 Parallel Proc3-AulaDokument35 SeitenCh12 Parallel Proc3-Aulalogu87Noch keine Bewertungen
- Parallel Computing (Unit5)Dokument25 SeitenParallel Computing (Unit5)Shriniwas YadavNoch keine Bewertungen
- Cs405-Computer System Architecture: Module - 1 Parallel Computer ModelsDokument91 SeitenCs405-Computer System Architecture: Module - 1 Parallel Computer Modelsashji s rajNoch keine Bewertungen
- Cs405-Computer System Architecture: Module - 1 Parallel Computer ModelsDokument72 SeitenCs405-Computer System Architecture: Module - 1 Parallel Computer Modelsashji s rajNoch keine Bewertungen
- Cs405-Computer System Architecture: Module - 1 Parallel Computer ModelsDokument72 SeitenCs405-Computer System Architecture: Module - 1 Parallel Computer Modelsashji s rajNoch keine Bewertungen
- Unit I IntroductionDokument54 SeitenUnit I IntroductionMerbin JoseNoch keine Bewertungen
- Chapter 08 - Pipeline and Vector ProcessingDokument14 SeitenChapter 08 - Pipeline and Vector ProcessingBijay MishraNoch keine Bewertungen
- Unit 1Dokument21 SeitenUnit 1vedarajNoch keine Bewertungen
- Parallel Computer Models: PCA Chapter 1Dokument61 SeitenParallel Computer Models: PCA Chapter 1AYUSH KUMARNoch keine Bewertungen
- Parallel Processing in Processor Organization: Prabhudev S IrabashettiDokument4 SeitenParallel Processing in Processor Organization: Prabhudev S IrabashettiAdiq CoolNoch keine Bewertungen
- ACA T1 SolutionsDokument17 SeitenACA T1 SolutionsshardapatelNoch keine Bewertungen
- Flynn's Taxonomy of Computer ArchitectureDokument8 SeitenFlynn's Taxonomy of Computer ArchitectureRajani SurejaNoch keine Bewertungen
- Chapter 9Dokument28 SeitenChapter 9Hiywot yesufNoch keine Bewertungen
- Parallel Computig AssignmentDokument15 SeitenParallel Computig AssignmentAnkitmauryaNoch keine Bewertungen
- Flyyn's Taxonomy ResearchDokument13 SeitenFlyyn's Taxonomy ResearchHiba AbdulwahedNoch keine Bewertungen
- 24-25 - Parallel Processing PDFDokument36 Seiten24-25 - Parallel Processing PDFfanna786Noch keine Bewertungen
- Parallel Architecture ClassificationDokument41 SeitenParallel Architecture ClassificationAbhishek singh0% (1)
- Advanced Computer ArchitectureDokument28 SeitenAdvanced Computer ArchitectureSameer KhudeNoch keine Bewertungen
- Organization of Multiprocessor SystemsDokument87 SeitenOrganization of Multiprocessor Systemsbijan shresthaNoch keine Bewertungen
- ACA Assignment 4Dokument16 SeitenACA Assignment 4shresth choudharyNoch keine Bewertungen
- Chapter 9 - M J Flynn ClassificationDokument14 SeitenChapter 9 - M J Flynn ClassificationSantanu SenapatiNoch keine Bewertungen
- Comparc Cpo203Dokument39 SeitenComparc Cpo203jerick_alviaNoch keine Bewertungen
- ModelDokument14 SeitenModelASHWANI MISHRANoch keine Bewertungen
- Relation To Computer System Components: M.D.Boomija, Ap/CseDokument39 SeitenRelation To Computer System Components: M.D.Boomija, Ap/Cseboomija100% (1)
- 5 Marks Q. Describe Array Processor ArchitectureDokument11 Seiten5 Marks Q. Describe Array Processor ArchitectureGaurav BiswasNoch keine Bewertungen
- Parallel I/O Systems and Interfaces For Parallel ComputersDokument35 SeitenParallel I/O Systems and Interfaces For Parallel ComputersHarryAngNoch keine Bewertungen
- Swami Vivekananda Institute of Science &: TechnologyDokument8 SeitenSwami Vivekananda Institute of Science &: Technologyamit BeraNoch keine Bewertungen
- What Is Parallel ProcessingDokument4 SeitenWhat Is Parallel ProcessingHarryNoch keine Bewertungen
- Parallel ProcessingDokument4 SeitenParallel Processingnikhilesh walde100% (1)
- Artificial IntelligenceDokument12 SeitenArtificial IntelligenceHimanshu MishraNoch keine Bewertungen
- AOK Lecture03 PDFDokument28 SeitenAOK Lecture03 PDFAndre SetiawanNoch keine Bewertungen
- Computer Architecture Unit V - Advanced Architecture Part-ADokument4 SeitenComputer Architecture Unit V - Advanced Architecture Part-AJennifer PeterNoch keine Bewertungen
- PDC - Lecture - No. 2Dokument31 SeitenPDC - Lecture - No. 2nauman tariqNoch keine Bewertungen
- Unit 3 NotesDokument9 SeitenUnit 3 NotesPurvi ChaurasiaNoch keine Bewertungen
- Parallel ProcessingDokument33 SeitenParallel ProcessingShivansh tomarNoch keine Bewertungen
- StudM1p1Parallel Computer Modelsppt1sharedDokument107 SeitenStudM1p1Parallel Computer Modelsppt1sharedSHEENA YNoch keine Bewertungen
- Architecture and OrganizationDokument4 SeitenArchitecture and OrganizationNickNoch keine Bewertungen
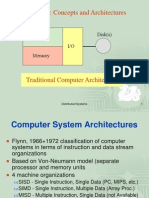
- Chapter 2: Concepts and Architectures: CPU I/O Disk(s)Dokument38 SeitenChapter 2: Concepts and Architectures: CPU I/O Disk(s)Dima AlkilaniNoch keine Bewertungen
- Module 1.2Dokument19 SeitenModule 1.2project missionNoch keine Bewertungen
- CA Document 1Dokument8 SeitenCA Document 1ToobaNoch keine Bewertungen
- CA Unit IV Notes Part 1 PDFDokument17 SeitenCA Unit IV Notes Part 1 PDFaarockiaabins AP - II - CSENoch keine Bewertungen
- 5.1parallel ProcessingDokument20 Seiten5.1parallel ProcessingAnanthu RKNoch keine Bewertungen
- Chapter - 5 Introduction To Advanced Architecture 5.1 Introduction To Parallel ProcessingDokument11 SeitenChapter - 5 Introduction To Advanced Architecture 5.1 Introduction To Parallel ProcessingTamene TekileNoch keine Bewertungen
- Parallel ProcessingDokument31 SeitenParallel ProcessingSantosh SinghNoch keine Bewertungen
- COA Chapter 6Dokument6 SeitenCOA Chapter 6Abebe GosuNoch keine Bewertungen
- Ca Unit 4 PrabuDokument24 SeitenCa Unit 4 Prabu6109 Sathish Kumar JNoch keine Bewertungen
- Introduction To Parallel ProcessingDokument11 SeitenIntroduction To Parallel ProcessingSathish KumarNoch keine Bewertungen
- Parallel ProcessingDokument35 SeitenParallel ProcessingGetu GeneneNoch keine Bewertungen
- Introduction To Parallel Processing: Shantanu Dutt University of Illinois at ChicagoDokument51 SeitenIntroduction To Parallel Processing: Shantanu Dutt University of Illinois at ChicagoDattatray BhateNoch keine Bewertungen
- SPMD Message Passing Broadcast On TILE-Gx8036Dokument8 SeitenSPMD Message Passing Broadcast On TILE-Gx8036Ligia CremeneNoch keine Bewertungen
- Parallel Computing: Charles KoelbelDokument12 SeitenParallel Computing: Charles KoelbelSilvio DresserNoch keine Bewertungen
- Computer Architecture 16 MarksDokument28 SeitenComputer Architecture 16 MarksBalachandar2000100% (1)
- Solved Assignment - Parallel ProcessingDokument29 SeitenSolved Assignment - Parallel ProcessingNoor Mohd Azad63% (8)
- Introduction To Computer SystemDokument66 SeitenIntroduction To Computer SystemIrfan Fazail100% (1)
- Parallel ComputingDokument34 SeitenParallel ComputingBittu VermaNoch keine Bewertungen
- Chapter-1 Parallel Computer Models: Module-1Dokument42 SeitenChapter-1 Parallel Computer Models: Module-1Rahul RajNoch keine Bewertungen
- 18 R. A. Kendall Et Al.: Mpi PutDokument4 Seiten18 R. A. Kendall Et Al.: Mpi PutlatinwolfNoch keine Bewertungen
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Von EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Noch keine Bewertungen
- Multicore Software Development Techniques: Applications, Tips, and TricksVon EverandMulticore Software Development Techniques: Applications, Tips, and TricksBewertung: 2.5 von 5 Sternen2.5/5 (2)
- Digital Differential Analysers: International Series of Monographs on Electronics and InstrumentationVon EverandDigital Differential Analysers: International Series of Monographs on Electronics and InstrumentationNoch keine Bewertungen
- Public SpeakingDokument14 SeitenPublic SpeakingShobhit MahawarNoch keine Bewertungen
- DFT QuestionsDokument8 SeitenDFT QuestionsShobhit Mahawar100% (3)
- DFTDokument1 SeiteDFTShobhit MahawarNoch keine Bewertungen
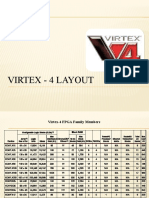
- Virtex-4 ArchitectureDokument10 SeitenVirtex-4 ArchitectureShobhit MahawarNoch keine Bewertungen
- Northern Region S.No Mi Code Name of The InstituteDokument32 SeitenNorthern Region S.No Mi Code Name of The Institutesjindal1989Noch keine Bewertungen
- Ifrs SapDokument6 SeitenIfrs Sapravikb01Noch keine Bewertungen
- CV HuangfuDokument5 SeitenCV Huangfuapi-297997469Noch keine Bewertungen
- Nursing 405 EfolioDokument5 SeitenNursing 405 Efolioapi-403368398100% (1)
- Unity FlowchartDokument1 SeiteUnity Flowchartcippolippo123Noch keine Bewertungen
- Taylor Linker ResumeDokument2 SeitenTaylor Linker ResumeTaylor LinkerNoch keine Bewertungen
- SajaneDokument6 SeitenSajaneJoshua AbordoNoch keine Bewertungen
- Chemistry Project On FertilizersDokument24 SeitenChemistry Project On FertilizersKamal Thakur75% (4)
- Sample Behavioral Interview QuestionsDokument3 SeitenSample Behavioral Interview QuestionssanthoshvNoch keine Bewertungen
- TOS Physical ScienceDokument1 SeiteTOS Physical ScienceSuzette De Leon0% (1)
- 2nd Announcement 13th InaSH Meeting 2019Dokument14 Seiten2nd Announcement 13th InaSH Meeting 2019adinda permataNoch keine Bewertungen
- Mitutoyo 183-109 Data SheetDokument1 SeiteMitutoyo 183-109 Data SheetLaboratorio AveNoch keine Bewertungen
- Confidence Limits in StatisticsDokument30 SeitenConfidence Limits in StatisticsaassmmrrNoch keine Bewertungen
- Leadership and FollowershipDokument43 SeitenLeadership and FollowershipNishant AgarwalNoch keine Bewertungen
- BearingsDokument63 SeitenBearingsYeabsraNoch keine Bewertungen
- Gad Practical-No - 09Dokument4 SeitenGad Practical-No - 09Amal fanseNoch keine Bewertungen
- Revised TA DA RulesDokument6 SeitenRevised TA DA RulesHardik AgravattNoch keine Bewertungen
- Generalization of The Lavallée and Hidiroglou AlgorithmDokument11 SeitenGeneralization of The Lavallée and Hidiroglou AlgorithmCristian MoisésNoch keine Bewertungen
- Manhunt!: Adventure Creation HandbookDokument17 SeitenManhunt!: Adventure Creation Handbookmadcap01Noch keine Bewertungen
- Questions: Comma PlacementDokument8 SeitenQuestions: Comma PlacementZarbibi Hussain khelNoch keine Bewertungen
- Project Execution PlanDokument69 SeitenProject Execution PlanGraco Calle100% (6)
- PV Quick StartDokument61 SeitenPV Quick StartMayur PatelNoch keine Bewertungen
- Sample Intern PropDokument7 SeitenSample Intern PropmaxshawonNoch keine Bewertungen
- Johnson, David W - Johnson, Frank P - Joining Together - Group Theory and Group Skills (2013)Dokument643 SeitenJohnson, David W - Johnson, Frank P - Joining Together - Group Theory and Group Skills (2013)Farah Ridzky Ananda88% (8)
- DTC Induction Motor DriveDokument13 SeitenDTC Induction Motor Drivesarav03100% (2)
- APO Overview Training - PPDSDokument22 SeitenAPO Overview Training - PPDSVijay HajnalkerNoch keine Bewertungen
- Modicon M580 Quick Start - v1.0 - Training ManualDokument169 SeitenModicon M580 Quick Start - v1.0 - Training Manualaryan_iust0% (1)
- NoteDokument4 SeitenNoteMost WonNoch keine Bewertungen
- Mission Statement Generator WorksheetDokument9 SeitenMission Statement Generator WorksheetMohamed SururrNoch keine Bewertungen
- Pasig Transparency OrdinanceDokument9 SeitenPasig Transparency OrdinanceVico Sotto100% (3)
- Daily Lesson Log: Department of EducationDokument10 SeitenDaily Lesson Log: Department of EducationStevenson Libranda BarrettoNoch keine Bewertungen