Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- JSRDokument3 SeitenJSRSwaroop Kumar NallagalvaNoch keine Bewertungen
- Artificial Neural Networkon ElectricalDokument21 SeitenArtificial Neural Networkon ElectricalSwaroop Kumar NallagalvaNoch keine Bewertungen
- Aptransco - Cgg.gov - in Documents ElectricalDokument697 SeitenAptransco - Cgg.gov - in Documents ElectricalSharath Teja ReddyNoch keine Bewertungen
- 2006 Tesis 49Dokument211 Seiten2006 Tesis 49Swaroop Kumar NallagalvaNoch keine Bewertungen
- Appendix-I: Bus Data For Ieee-14 Bus SystemDokument13 SeitenAppendix-I: Bus Data For Ieee-14 Bus SystemSwaroop Kumar NallagalvaNoch keine Bewertungen
- Power System ProtectionDokument23 SeitenPower System Protectionmqahtany1Noch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- 1xEV RF Optimization Guidelines R24Dokument83 Seiten1xEV RF Optimization Guidelines R24lady_sNoch keine Bewertungen
- Poetics: Ester Van Laar, Alexander J.A.M. Van Deursen, Jan A.G.M. Van Dijk, Jos de HaanDokument14 SeitenPoetics: Ester Van Laar, Alexander J.A.M. Van Deursen, Jan A.G.M. Van Dijk, Jos de HaanViveka AshokNoch keine Bewertungen
- STEEL STRUCTURES KHARGHAR SKYWALK AND NIFT INSTITUTE Ms PPT 2007Dokument30 SeitenSTEEL STRUCTURES KHARGHAR SKYWALK AND NIFT INSTITUTE Ms PPT 2007Harsh chhedaNoch keine Bewertungen
- Journal Publishing ProcessDokument1 SeiteJournal Publishing Processmohamedr55104Noch keine Bewertungen
- Chapter 5 (6) Concrete MaterialDokument134 SeitenChapter 5 (6) Concrete Materialraju_420034520Noch keine Bewertungen
- Communication Skills For Effective LeadershipDokument12 SeitenCommunication Skills For Effective LeadershipKovaNoch keine Bewertungen
- Acc Inter 3 AtsiriDokument9 SeitenAcc Inter 3 AtsiriZania Putri100% (1)
- Eurotuner February 2010 PDFDokument1 SeiteEurotuner February 2010 PDFJenniferNoch keine Bewertungen
- (Revised) Dale Carnegie-How To Win Friends and Influence People-Simon and Schuster (1981)Dokument12 Seiten(Revised) Dale Carnegie-How To Win Friends and Influence People-Simon and Schuster (1981)TomasUreñaNoch keine Bewertungen
- Probability and Statistics Ii Assignment I July 2019 PDFDokument3 SeitenProbability and Statistics Ii Assignment I July 2019 PDFDanielNoch keine Bewertungen
- 4naa7 4eeDokument2 Seiten4naa7 4eeDorottya HózsaNoch keine Bewertungen
- Soft Sculpture EventsDokument28 SeitenSoft Sculpture EventsAlabala BalaaNoch keine Bewertungen
- Key Term Arabic Meaning Link: Life ScienceDokument5 SeitenKey Term Arabic Meaning Link: Life ScienceReemNoch keine Bewertungen
- Balanced Cable Measurement Using The 4-Port ENADokument9 SeitenBalanced Cable Measurement Using The 4-Port ENAA. VillaNoch keine Bewertungen
- CertificateofAnalysis 2019 11 9 879766Dokument2 SeitenCertificateofAnalysis 2019 11 9 879766Trọng TínNoch keine Bewertungen
- Enabling Secure Broadband Access Anywhere Anytime Access Anywhere, AnytimeDokument4 SeitenEnabling Secure Broadband Access Anywhere Anytime Access Anywhere, AnytimeEmmanuelNoch keine Bewertungen
- MC68 HC05 B4 UDokument253 SeitenMC68 HC05 B4 Uflo724Noch keine Bewertungen
- Student Camps 2022 - Grade 6 Science Curriculum Based Test BookletDokument58 SeitenStudent Camps 2022 - Grade 6 Science Curriculum Based Test Bookletthank you GodNoch keine Bewertungen
- IB Biology Lab Report TemplateDokument6 SeitenIB Biology Lab Report TemplatebigbuddhazNoch keine Bewertungen
- I. Company Data 1.1. Company ProfileDokument19 SeitenI. Company Data 1.1. Company ProfileMhy AcajaNoch keine Bewertungen
- USDP Shehzore02Dokument39 SeitenUSDP Shehzore02Feroz GullNoch keine Bewertungen
- Procedure Issuing EtaDokument5 SeitenProcedure Issuing EtaCarlos FrançaNoch keine Bewertungen
- APAVE Tiger CP - UK - FINAL2Dokument1 SeiteAPAVE Tiger CP - UK - FINAL2AdrewhassTechnicaNoch keine Bewertungen
- Advanced Numerical Modelling of Geogrids and Steel Wire Meshes - Daniele TubertiniDokument94 SeitenAdvanced Numerical Modelling of Geogrids and Steel Wire Meshes - Daniele TubertiniSze Mian KuehNoch keine Bewertungen
- Pipeline Construction InspecDokument48 SeitenPipeline Construction InspecAliDadKhan100% (2)
- 63-9378 - Rev-F - Ultra Puck - Datasheet - Web - 63-9378 - Rev-F - Ultra-Puck - Datasheet - WebDokument2 Seiten63-9378 - Rev-F - Ultra Puck - Datasheet - Web - 63-9378 - Rev-F - Ultra-Puck - Datasheet - WebAradhana AradhanaNoch keine Bewertungen
- ROV Inspection and Intervention VesselDokument2 SeitenROV Inspection and Intervention VesselAhmad Reza AtefNoch keine Bewertungen
- BCO120Dokument3 SeitenBCO120erwin_simsensohnNoch keine Bewertungen
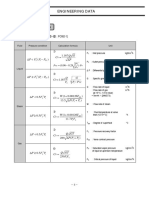
- Engineering Data: 2. CV CalculationDokument1 SeiteEngineering Data: 2. CV Calculationdj22500Noch keine Bewertungen