Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Capacity Plus Deployment GuideDokument29 SeitenCapacity Plus Deployment GuideSmartPTT100% (1)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- ARRL Recommended Amateur Radio BooksDokument12 SeitenARRL Recommended Amateur Radio Booksaustintexas1234100% (2)
- Bd2-Brent Mason-ModDokument8 SeitenBd2-Brent Mason-ModНиколай ПрокопенкоNoch keine Bewertungen
- 739685Dokument2 Seiten739685Enmanuel Calcaño DiazNoch keine Bewertungen
- 6 Microwave Comm System PDFDokument42 Seiten6 Microwave Comm System PDFJeffreyBeridaNoch keine Bewertungen
- Nmath 3Dokument1 SeiteNmath 3api-3797997Noch keine Bewertungen
- NmathDokument1 SeiteNmathapi-3797997Noch keine Bewertungen
- CommDokument26 SeitenCommapi-3797997Noch keine Bewertungen
- Nmath 2Dokument1 SeiteNmath 2api-3797997Noch keine Bewertungen
- Nmat 1Dokument1 SeiteNmat 1api-3797997Noch keine Bewertungen
- NdrawDokument1 SeiteNdrawapi-3797997Noch keine Bewertungen
- NhindiDokument1 SeiteNhindiapi-3797997Noch keine Bewertungen
- Unitedschoolsv!Rf !! : Juniorun Information TestcertificateDokument1 SeiteUnitedschoolsv!Rf !! : Juniorun Information Testcertificateapi-3797997Noch keine Bewertungen
- Neng 3Dokument1 SeiteNeng 3api-3797997Noch keine Bewertungen
- Neng 2Dokument1 SeiteNeng 2api-3797997Noch keine Bewertungen
- NengDokument1 SeiteNengapi-3797997Noch keine Bewertungen
- Egg at HonDokument1 SeiteEgg at Honapi-3797997Noch keine Bewertungen
- Big BabolDokument1 SeiteBig Babolapi-3797997Noch keine Bewertungen
- Maharashtra Cadet CorpsDokument1 SeiteMaharashtra Cadet Corpsapi-3797997Noch keine Bewertungen
- Schloarship Special PrizeDokument1 SeiteSchloarship Special Prizeapi-3797997Noch keine Bewertungen
- Homibhabha SRDokument1 SeiteHomibhabha SRapi-3797997Noch keine Bewertungen
- Homibhabha JRDokument1 SeiteHomibhabha JRapi-3797997Noch keine Bewertungen
- First YearDokument19 SeitenFirst Yearapi-3797997Noch keine Bewertungen
- Dolby Lake Processor System ManualDokument64 SeitenDolby Lake Processor System ManualcarrtmannNoch keine Bewertungen
- CFD F17CPDokument58 SeitenCFD F17CPEmmanuel VargasNoch keine Bewertungen
- VHF Omnidirectional Dipole Arrays: Binary Array SeriesDokument1 SeiteVHF Omnidirectional Dipole Arrays: Binary Array SeriesBao Quoc MaiNoch keine Bewertungen
- Study of Resonant Microstrip Antennas On Artificial Neural NetworksDokument6 SeitenStudy of Resonant Microstrip Antennas On Artificial Neural NetworksresearchparksNoch keine Bewertungen
- Transmission MediaDokument16 SeitenTransmission MediaJames MacalaladNoch keine Bewertungen
- High Performance Digital Current Control in Three Phase Electrical Drives Ljiljana S. Peric, Slobodan N. VukosavicDokument22 SeitenHigh Performance Digital Current Control in Three Phase Electrical Drives Ljiljana S. Peric, Slobodan N. Vukosavicankur rathiNoch keine Bewertungen
- 4G Technology and Its ApplicationsDokument6 Seiten4G Technology and Its ApplicationsAchmad YukrisnaNoch keine Bewertungen
- Practical Signal ProcessingDokument30 SeitenPractical Signal ProcessingLokender TiwariNoch keine Bewertungen
- Harman Kardon BassLink Service Manual PDFDokument56 SeitenHarman Kardon BassLink Service Manual PDFtingNoch keine Bewertungen
- Antenna Introduction 003Dokument46 SeitenAntenna Introduction 003MariNoch keine Bewertungen
- MODELS WT1010/WT1030/WT1030M Digital Power Meters: IWASE Hisashi TSUJI Hirotaka TACHIBANA Katsuya HIRAI KazuoDokument4 SeitenMODELS WT1010/WT1030/WT1030M Digital Power Meters: IWASE Hisashi TSUJI Hirotaka TACHIBANA Katsuya HIRAI KazuoNikolayNoch keine Bewertungen
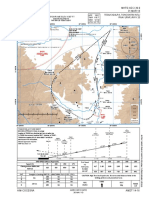
- Central America AIP MHTG AD 2-39.9 31 MAR 16Dokument2 SeitenCentral America AIP MHTG AD 2-39.9 31 MAR 16RonaldamadorNoch keine Bewertungen
- Filter - Realization - UpdatedDokument122 SeitenFilter - Realization - UpdatedemperorjnxNoch keine Bewertungen
- Cs601 Midterm Solved Mcqs by JunaidDokument64 SeitenCs601 Midterm Solved Mcqs by JunaidSAIM ALI RASHIDNoch keine Bewertungen
- Philips MC 235 B Service ManualDokument36 SeitenPhilips MC 235 B Service ManualTrabelssi RamziNoch keine Bewertungen
- G Series: Lloow W Ffrreeqquueennccyy TtrraannssdduucceerrDokument2 SeitenG Series: Lloow W Ffrreeqquueennccyy TtrraannssdduucceerrFrancisco EscobarNoch keine Bewertungen
- NMC - Lte X2 Handover.v1.0Dokument2 SeitenNMC - Lte X2 Handover.v1.0neerajj.jainNoch keine Bewertungen
- Phased Array Radars: J. L. Chau, C. J. Heinselman, M. J. NicollsDokument52 SeitenPhased Array Radars: J. L. Chau, C. J. Heinselman, M. J. NicollsNguyễn Hoàng Giang100% (1)
- Huawei WCDMA Call Drop Counter and KPI IntroductionDokument34 SeitenHuawei WCDMA Call Drop Counter and KPI Introductionminhtuanqni100% (1)
- Asemrowo Margorukun: Lions GateDokument15 SeitenAsemrowo Margorukun: Lions GateFachrur Rasyid IshaqNoch keine Bewertungen
- Ch5 (4e) Soln Part2Dokument34 SeitenCh5 (4e) Soln Part2Moh'd M. GharbiehNoch keine Bewertungen
- Optical Communication NetworksDokument4 SeitenOptical Communication Networksarivurp100% (1)
- Huawei Honor 5X (GR5) PDFDokument69 SeitenHuawei Honor 5X (GR5) PDFDayronToro0% (1)
- Mobilinkd TNC3 User Guide: WarningDokument23 SeitenMobilinkd TNC3 User Guide: WarningDaren NeradNoch keine Bewertungen