Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Model DPR & Application Form For Integrated RAS PDFDokument17 SeitenModel DPR & Application Form For Integrated RAS PDFAnbu BalaNoch keine Bewertungen
- Skilled Worker Overseas FAQs - Manitoba Immigration and Economic OpportunitiesDokument2 SeitenSkilled Worker Overseas FAQs - Manitoba Immigration and Economic OpportunitieswesamNoch keine Bewertungen
- BS 215-2-1970-Aluminium Conductors and Aluminium Conductors Steel-Reinforced For Overhead Power TransmissionDokument16 SeitenBS 215-2-1970-Aluminium Conductors and Aluminium Conductors Steel-Reinforced For Overhead Power TransmissionDayan Yasaranga100% (2)
- Python Tutorial - Introduction To PythonDokument104 SeitenPython Tutorial - Introduction To PythonomarsvitsNoch keine Bewertungen
- FirewallDokument40 SeitenFirewallomarsvits100% (5)
- BluetoothDokument31 SeitenBluetoothomarsvits100% (8)
- Web Spoofing PresentationDokument37 SeitenWeb Spoofing Presentationomarsvits91% (11)
- Categories of Cargo and Types of ShipsDokument14 SeitenCategories of Cargo and Types of ShipsVibhav Kumar100% (1)
- Eaai S 23 02045 PDFDokument28 SeitenEaai S 23 02045 PDFAnjali JainNoch keine Bewertungen
- Chalcedony Value, Price, and Jewelry Information - International Gem SocietyDokument8 SeitenChalcedony Value, Price, and Jewelry Information - International Gem Societyasset68Noch keine Bewertungen
- FM Testbank-Ch18Dokument9 SeitenFM Testbank-Ch18David LarryNoch keine Bewertungen
- 2021-01-01 - Project (Construction) - One TemplateDokument1.699 Seiten2021-01-01 - Project (Construction) - One TemplatemayalogamNoch keine Bewertungen
- MSDS Formic AcidDokument3 SeitenMSDS Formic AcidChirag DobariyaNoch keine Bewertungen
- Rwamagana s5 Mathematics CoreDokument4 SeitenRwamagana s5 Mathematics Coreevariste.ndungutse1493Noch keine Bewertungen
- Fall 3050 SyllabusDokument6 SeitenFall 3050 Syllabustaher91Noch keine Bewertungen
- Service Letter Service Letter Service Letter Service Letter: Commercial Aviation ServicesDokument3 SeitenService Letter Service Letter Service Letter Service Letter: Commercial Aviation ServicesSamarNoch keine Bewertungen
- 16-ELS-Final-Module 16-08082020Dokument18 Seiten16-ELS-Final-Module 16-08082020jeseca cincoNoch keine Bewertungen
- Chapter 10 OutlineDokument3 SeitenChapter 10 OutlineFerrari75% (4)
- ProjectDokument22 SeitenProjectSayan MondalNoch keine Bewertungen
- NCDC-2 Physical Health Inventory Form A4Dokument6 SeitenNCDC-2 Physical Health Inventory Form A4knock medinaNoch keine Bewertungen
- ARTS10 Q2 ModuleDokument12 SeitenARTS10 Q2 ModuleDen Mark GacumaNoch keine Bewertungen
- Phenomenology of The SelfDokument5 SeitenPhenomenology of The SelfGuilherme CastelucciNoch keine Bewertungen
- OM Part B - Rev1Dokument45 SeitenOM Part B - Rev1Redouane BelaassiriNoch keine Bewertungen
- PMDG 737NGX Tutorial 2 PDFDokument148 SeitenPMDG 737NGX Tutorial 2 PDFMatt HenryNoch keine Bewertungen
- Distance SortDokument6 SeitenDistance SortAI Coordinator - CSC JournalsNoch keine Bewertungen
- Rate If Iodine and PropanoneDokument3 SeitenRate If Iodine and Propanoneshareef1Noch keine Bewertungen
- Verilog A Model To CadenceDokument56 SeitenVerilog A Model To CadenceJamesNoch keine Bewertungen
- Adding and Subtracting FractionsDokument4 SeitenAdding and Subtracting Fractionsapi-508898016Noch keine Bewertungen
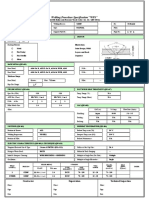
- Wps For Carbon Steel THK 7.11 GtawDokument1 SeiteWps For Carbon Steel THK 7.11 GtawAli MoosaviNoch keine Bewertungen
- Volvo Catalog Part2Dokument360 SeitenVolvo Catalog Part2Denis Konovalov71% (7)
- Genie PDFDokument277 SeitenGenie PDFOscar ItzolNoch keine Bewertungen
- Net Pert: Cable QualifierDokument4 SeitenNet Pert: Cable QualifierAndrés Felipe Fandiño MNoch keine Bewertungen
- Invoice ApprovalDokument54 SeitenInvoice ApprovalHamada Asmr AladhamNoch keine Bewertungen
- Learning Module - Joints, Taps and SplicesDokument9 SeitenLearning Module - Joints, Taps and SplicesCarlo Cartagenas100% (1)