Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Studio4 - LEED - Green - Associate - Study - Guide - Master 2nd Edition PDFDokument310 SeitenStudio4 - LEED - Green - Associate - Study - Guide - Master 2nd Edition PDFyu zhangNoch keine Bewertungen
- Feed Water and Boiler Water of Steam GeneratorsDokument2 SeitenFeed Water and Boiler Water of Steam GeneratorsIvicaT0% (2)
- Leica 307 ManualDokument4 SeitenLeica 307 ManualRaluca Sandu100% (2)
- Technical White Paper For IP Leased Line PDFDokument48 SeitenTechnical White Paper For IP Leased Line PDFTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- Diode Innovation: AgendaDokument7 SeitenDiode Innovation: AgendaTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- CALCULATORDokument1 SeiteCALCULATORDaksh HarshNoch keine Bewertungen
- Technical White Paper For IP Leased Line PDFDokument48 SeitenTechnical White Paper For IP Leased Line PDFTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- Rectifier For Power Factor CorrectionDokument3 SeitenRectifier For Power Factor CorrectionTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- SIMM Local Status Codes and Status DescriptionsDokument4 SeitenSIMM Local Status Codes and Status DescriptionsTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- SIMM Local Status Codes and Status DescriptionsDokument4 SeitenSIMM Local Status Codes and Status DescriptionsTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- MATCHLINK SDN BHD LEAVE APPLICATION FORMDokument1 SeiteMATCHLINK SDN BHD LEAVE APPLICATION FORMTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- ComMed-Logbook TcsDokument143 SeitenComMed-Logbook TcsTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- Management ProjectDokument50 SeitenManagement ProjectTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- SIMM Local Status Codes and Status DescriptionsDokument4 SeitenSIMM Local Status Codes and Status DescriptionsTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- ELX 218 Lab 1 Feb2012 LabmanualDokument16 SeitenELX 218 Lab 1 Feb2012 LabmanualTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- Power Distribution at NFC EeeDokument70 SeitenPower Distribution at NFC EeeTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- Diode Innovation: AgendaDokument7 SeitenDiode Innovation: AgendaTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- 97INTELEC Ide Froehleke 3PhaseSwitchedModeRectifiersDokument7 Seiten97INTELEC Ide Froehleke 3PhaseSwitchedModeRectifiersTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- Power Systems 09032014 1200hrsDokument19 SeitenPower Systems 09032014 1200hrsTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- Raki Thomas & Ramanan (KL) Organizational Structure: Managing PartnerDokument1 SeiteRaki Thomas & Ramanan (KL) Organizational Structure: Managing PartnerTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- ELX214 Coursework Lab (20%) - 2013 - UpdatedDokument33 SeitenELX214 Coursework Lab (20%) - 2013 - UpdatedTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- ElectroplatingDokument8 SeitenElectroplatingjawsm100% (1)
- ManufacturingDokument6 SeitenManufacturingTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- 8093 29650 1 PBDokument6 Seiten8093 29650 1 PBTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- Dana Amanah SPA by IPD 003Dokument1 SeiteDana Amanah SPA by IPD 003TeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- Additional Mathematics ProjectDokument26 SeitenAdditional Mathematics ProjectTeEbhan ChAnthira SeEkaranNoch keine Bewertungen
- DC DC DC DC Iiii 6 6 6 6: Spec Spec Spec SpecDokument12 SeitenDC DC DC DC Iiii 6 6 6 6: Spec Spec Spec SpecarsolNoch keine Bewertungen
- Network What To ReadDokument2 SeitenNetwork What To ReadTauseef AhmadNoch keine Bewertungen
- Chapter-6 IscaDokument1 SeiteChapter-6 IscakishorejiNoch keine Bewertungen
- Inventory Management PreetDokument28 SeitenInventory Management PreetKawalpreet Singh MakkarNoch keine Bewertungen
- Grounding Vs BondingDokument2 SeitenGrounding Vs BondingVictor HutahaeanNoch keine Bewertungen
- Permeability: The Key to ProductionDokument30 SeitenPermeability: The Key to ProductionDarshak Sakhreliya100% (1)
- Airflex 728 Vinyl Acetate-Ethylene Copolymer Modified With Vinyl ChlorideDokument2 SeitenAirflex 728 Vinyl Acetate-Ethylene Copolymer Modified With Vinyl ChlorideNissim Hazar CasanovaNoch keine Bewertungen
- Sodium Citrate AUDokument3 SeitenSodium Citrate AUKrishna OgotNoch keine Bewertungen
- Smarter and Safer: Cordless Endodontic HandpieceDokument2 SeitenSmarter and Safer: Cordless Endodontic Handpiecesonu1296Noch keine Bewertungen
- Fajs FSXDokument8 SeitenFajs FSXJunhy Bandeira CassandraNoch keine Bewertungen
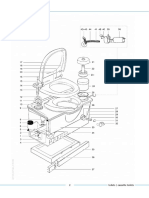
- Cassette toilet spare parts guide for models C2, C3 and C4Dokument21 SeitenCassette toilet spare parts guide for models C2, C3 and C4georgedragosNoch keine Bewertungen
- Operating Instructions, FormulaDokument35 SeitenOperating Instructions, FormulaandymulyonoNoch keine Bewertungen
- Cs 180 Notes UCLADokument3 SeitenCs 180 Notes UCLAnattaq12345Noch keine Bewertungen
- 02 - Critical Customers Complains enDokument8 Seiten02 - Critical Customers Complains enKJDNKJZEF100% (1)
- Thu Thiem Tunnel Construction - Sequence - Immersed - Tunnel PDFDokument36 SeitenThu Thiem Tunnel Construction - Sequence - Immersed - Tunnel PDFThông PhanNoch keine Bewertungen
- Concrete: Concrete Is A Composite Material Composed of Fine and CoarseDokument36 SeitenConcrete: Concrete Is A Composite Material Composed of Fine and CoarseclubmailusNoch keine Bewertungen
- CFS50 motor feedback installation instructionsDokument1 SeiteCFS50 motor feedback installation instructionsJavier AlzateNoch keine Bewertungen
- Please Note That This Form Details Exploration and Production Api Titles Available For OrderDokument8 SeitenPlease Note That This Form Details Exploration and Production Api Titles Available For Orderhaotran68Noch keine Bewertungen
- Assign4 RANSDokument2 SeitenAssign4 RANSankitsaneetNoch keine Bewertungen
- كتاب الهيدروديناميكا-4 The HydrodynamicDokument25 Seitenكتاب الهيدروديناميكا-4 The HydrodynamicHocine Gherbi FaycelNoch keine Bewertungen
- ETN2A ElectromechanicsDokument64 SeitenETN2A ElectromechanicsEinstein's VanderbijlparkNoch keine Bewertungen
- LMDQDokument601 SeitenLMDQMohd Azamuddin Mohd SaifullizanNoch keine Bewertungen
- 01chapter 5-1Dokument55 Seiten01chapter 5-1AhmNoch keine Bewertungen
- A Study of The Spectral Properties of Rhodamine (6G&B) Dyes Mixture Dissolved in ChloroformDokument14 SeitenA Study of The Spectral Properties of Rhodamine (6G&B) Dyes Mixture Dissolved in ChloroformNoureddine BarkaNoch keine Bewertungen
- Calculate heating and cooling loads for buildingsDokument8 SeitenCalculate heating and cooling loads for buildingsdpadrianNoch keine Bewertungen
- Ashrae - 2009 I-P - F09 - AddDokument2 SeitenAshrae - 2009 I-P - F09 - AddSergio SemmNoch keine Bewertungen
- Control Fixed Bed ReactorsDokument4 SeitenControl Fixed Bed ReactorsAddison JuttieNoch keine Bewertungen