Das könnte Ihnen auch gefallen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- LM135 Series Precision Temperature Sensors with 1°C AccuracyDokument4 SeitenLM135 Series Precision Temperature Sensors with 1°C AccuracyfrankyNoch keine Bewertungen
- RA - 10913 Anti-Distracred DrivingDokument5 SeitenRA - 10913 Anti-Distracred DrivingmorningmindsetNoch keine Bewertungen
- GSITS Indore Computer Engg Scheme Syllabus 2018-19Dokument65 SeitenGSITS Indore Computer Engg Scheme Syllabus 2018-19rocinguy100% (1)
- IVECO Eurorider Service Manual PDFDokument100 SeitenIVECO Eurorider Service Manual PDFkowal33% (3)
- Periodic Table FullDokument24 SeitenPeriodic Table FullabydaieNoch keine Bewertungen
- YEW UP35A ManualDokument404 SeitenYEW UP35A ManualJhonatan BuenoNoch keine Bewertungen
- Overview: Brushless DC Motor Driver Circuit Using 555 ICDokument4 SeitenOverview: Brushless DC Motor Driver Circuit Using 555 ICJanet Walde100% (1)
- 7thAnd8thSemSyllabus MEDokument67 Seiten7thAnd8thSemSyllabus MEahmadNoch keine Bewertungen
- 4 Essential Features of Transformer On-Load Tap Changer OLTCDokument5 Seiten4 Essential Features of Transformer On-Load Tap Changer OLTCrobertoseniorNoch keine Bewertungen
- Measure Temperature of Fluids Using Thermocouples and ThermometersDokument5 SeitenMeasure Temperature of Fluids Using Thermocouples and ThermometersSaad khanNoch keine Bewertungen
- Devising a solar powered standalone vehicle using GSM communication network for remote control and surveillanceDokument3 SeitenDevising a solar powered standalone vehicle using GSM communication network for remote control and surveillancePooja BanNoch keine Bewertungen
- Belimo NR24A - Datasheet - En-GbDokument3 SeitenBelimo NR24A - Datasheet - En-GbJLNavarroNoch keine Bewertungen
- FORM TP 22247: Caribbean Examinat Advanced Proficiency Physics Ions Coun ExaminationDokument19 SeitenFORM TP 22247: Caribbean Examinat Advanced Proficiency Physics Ions Coun Examinationpetey78Noch keine Bewertungen
- ElotrixX Leveling & Farming ScriptDokument4 SeitenElotrixX Leveling & Farming ScriptCristian Bustamante CarrascoNoch keine Bewertungen
- cbhf2 NaDokument8 Seitencbhf2 NaStefan CorjucNoch keine Bewertungen
- MDC-2900P - Installation Manual 0092629002-03 PDFDokument96 SeitenMDC-2900P - Installation Manual 0092629002-03 PDF'RomNoch keine Bewertungen
- HF Transceiver PDFDokument16 SeitenHF Transceiver PDFHaggai Ben BaruchNoch keine Bewertungen
- Emission and Interaction from Domestic Installations in the Low Voltage Electricity NetworkDokument158 SeitenEmission and Interaction from Domestic Installations in the Low Voltage Electricity Networkrobert_rjcNoch keine Bewertungen
- A Transportable Neural-Network Approach To Autonomous Vehicle FollowingDokument9 SeitenA Transportable Neural-Network Approach To Autonomous Vehicle FollowingAhmet İlker ŞinNoch keine Bewertungen
- Electronic Kitchen Scale With Touch Button: Instructions For UseDokument2 SeitenElectronic Kitchen Scale With Touch Button: Instructions For Usearugdos2Noch keine Bewertungen
- Pulse Oximeter Schematics Rev DDokument2 SeitenPulse Oximeter Schematics Rev DRene Gonzales VasquezNoch keine Bewertungen
- Ieee PaperDokument6 SeitenIeee PaperJayant OjhaNoch keine Bewertungen
- Introduction To Electricity & Electrical Systems: Prelim Learning ResourcesDokument41 SeitenIntroduction To Electricity & Electrical Systems: Prelim Learning ResourcesKib-anne Miguel PasikanNoch keine Bewertungen
- Alcatel 1600 Series - Carritech TelecommunicationsDokument2 SeitenAlcatel 1600 Series - Carritech TelecommunicationsCarritech TelecommunicationsNoch keine Bewertungen
- Philips Semiconductors Product Discontinuation Notice DN 56 December 31, 2005Dokument30 SeitenPhilips Semiconductors Product Discontinuation Notice DN 56 December 31, 2005pvumasarikNoch keine Bewertungen
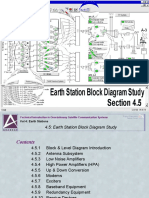
- Earth Station Block Diagram Study: Section 5Dokument213 SeitenEarth Station Block Diagram Study: Section 5Extreme DaysNoch keine Bewertungen
- Scientific Charge-Coupled DevicesDokument921 SeitenScientific Charge-Coupled DevicesBraulio Javier Cancino Vera100% (1)
- EPSON SureColor P Series Brochure-Sticker PDFDokument6 SeitenEPSON SureColor P Series Brochure-Sticker PDFAnonymous WD109UakyNoch keine Bewertungen
- UCE-CT220L FAULT LOCATOR USER MANUALDokument10 SeitenUCE-CT220L FAULT LOCATOR USER MANUALtecsupport100% (2)
- 1 11 12 13 14 21 22 23 24 25 31 Knock Sensor (KS) - Circuit Malfunction Wiring, KS, ECM 36 41 Injectors - Circuit Malfunction 44 52 53 54 55 59 61Dokument3 Seiten1 11 12 13 14 21 22 23 24 25 31 Knock Sensor (KS) - Circuit Malfunction Wiring, KS, ECM 36 41 Injectors - Circuit Malfunction 44 52 53 54 55 59 61Fajar DwiNoch keine Bewertungen