Das könnte Ihnen auch gefallen
- MA Viva BankDokument9 SeitenMA Viva BankManish NarkhedeNoch keine Bewertungen
- ActiveRobot User Guide PDFDokument288 SeitenActiveRobot User Guide PDFJosé Juan De león JuárezNoch keine Bewertungen
- MICROCONTROLLER FAMILY of PIC 18Dokument29 SeitenMICROCONTROLLER FAMILY of PIC 18Taha AssadiNoch keine Bewertungen
- Micro ControllerDokument17 SeitenMicro ControllerdilNoch keine Bewertungen
- Chapter 2Dokument41 SeitenChapter 2Lavanya GowdaNoch keine Bewertungen
- 1st Handout 8051Dokument26 Seiten1st Handout 8051SaawanBaggNoch keine Bewertungen
- 8 MPLAB ICD & PIC 16F877 Tutorial: CY CY OSC OSCDokument9 Seiten8 MPLAB ICD & PIC 16F877 Tutorial: CY CY OSC OSCrobotbusterNoch keine Bewertungen
- An Introduction To The PIC Microcontroller: EE2801 - Lecture 19Dokument9 SeitenAn Introduction To The PIC Microcontroller: EE2801 - Lecture 19Reddy BabuNoch keine Bewertungen
- Assembly Language Instructions: ELEC 330 Digital Systems Engineering Dr. Ron HayneDokument47 SeitenAssembly Language Instructions: ELEC 330 Digital Systems Engineering Dr. Ron HayneMohammad Hafiz OthmanNoch keine Bewertungen
- Unit 4Dokument108 SeitenUnit 4Rasool NayabNoch keine Bewertungen
- NEC 022 External Paper SolutionDokument13 SeitenNEC 022 External Paper SolutionSachin PalNoch keine Bewertungen
- By H.V.Rama Krishna Murthy Sse/ElecDokument45 SeitenBy H.V.Rama Krishna Murthy Sse/ElecRamdek RamdekNoch keine Bewertungen
- ON Microcontroller-8051 and Applications: BY G N V Ratna Kishor M.Sc.,M.Tech. Asst. ProfessorDokument66 SeitenON Microcontroller-8051 and Applications: BY G N V Ratna Kishor M.Sc.,M.Tech. Asst. ProfessorbhavanimaddulaNoch keine Bewertungen
- Sim RimDokument13 SeitenSim RimKalai VaniNoch keine Bewertungen
- Unit - IV 1. What Is Mean by Microcontroller?: Internal Blocks of MicrocontrollerDokument6 SeitenUnit - IV 1. What Is Mean by Microcontroller?: Internal Blocks of MicrocontrollerkesavantNoch keine Bewertungen
- 8051 Uc CompleteDokument129 Seiten8051 Uc CompletemalhiavtarsinghNoch keine Bewertungen
- Solved Tutorial With Tiny Bugs27-8-12Dokument24 SeitenSolved Tutorial With Tiny Bugs27-8-12WondosenEshetieNoch keine Bewertungen
- The 8051 Microcontroller: Lets EXPLORE Inside 8051 !!Dokument45 SeitenThe 8051 Microcontroller: Lets EXPLORE Inside 8051 !!ZuricHuntNoch keine Bewertungen
- EE6008 Notes RejinpaulDokument234 SeitenEE6008 Notes RejinpaulB.S. Mothika sriNoch keine Bewertungen
- Block Diagram of Processor (Harvard)Dokument48 SeitenBlock Diagram of Processor (Harvard)Nichita IonutNoch keine Bewertungen
- PIC Microcontrollers: Low-End ArchitecturesDokument46 SeitenPIC Microcontrollers: Low-End Architecturesvivek2585Noch keine Bewertungen
- Embedded Systems With 8051 CDokument190 SeitenEmbedded Systems With 8051 CPayal SinghNoch keine Bewertungen
- 8051 Enhanced)Dokument58 Seiten8051 Enhanced)Vinay Nagnath Jokare100% (1)
- Delhi Technological University Assignment Embedded SystemsDokument9 SeitenDelhi Technological University Assignment Embedded Systemssatinder singhNoch keine Bewertungen
- Sic and SIC/XEDokument14 SeitenSic and SIC/XEravneet_mahal198100% (1)
- PIC18F458PPTDokument58 SeitenPIC18F458PPTdgkanade72Noch keine Bewertungen
- Mpi LabDokument21 SeitenMpi LabmajorjawarpartapNoch keine Bewertungen
- PIC18 Architecture 1Dokument104 SeitenPIC18 Architecture 1Danish Ur RahmanNoch keine Bewertungen
- Lec 2 - Org of MicroprocessorsDokument31 SeitenLec 2 - Org of Microprocessorsapi-237335979Noch keine Bewertungen
- PIC18 Microcontroller Instruction Set SummaryDokument6 SeitenPIC18 Microcontroller Instruction Set SummarySammy Jaafar100% (1)
- Sheet MicorDokument42 SeitenSheet MicorFiras TaherNoch keine Bewertungen
- List The Features of 8051 Microcontroller?Dokument4 SeitenList The Features of 8051 Microcontroller?Murugesan ArumugamNoch keine Bewertungen
- 8086 PPTDokument30 Seiten8086 PPTKavitha Subramaniam100% (1)
- Sap-1 ArchitectureDokument9 SeitenSap-1 ArchitectureAshna100% (1)
- EP - Unit - V - Real World Interfacing With Cortex M4 Based MicrocontrollerDokument114 SeitenEP - Unit - V - Real World Interfacing With Cortex M4 Based Microcontrollerganesh SawantNoch keine Bewertungen
- TMS320LF2407 IntroductionDokument43 SeitenTMS320LF2407 IntroductionJatin Yadav100% (2)
- 8085Dokument56 Seiten8085Kunal MeherNoch keine Bewertungen
- The 8051 ArchitectureDokument80 SeitenThe 8051 ArchitectureManoj GadgeNoch keine Bewertungen
- Training ReportDokument18 SeitenTraining Reportpiyushji125Noch keine Bewertungen
- Arm7 ArchitectureDokument20 SeitenArm7 ArchitectureCharitha CherryNoch keine Bewertungen
- Micro 2Dokument6 SeitenMicro 2Zuhaib AyazNoch keine Bewertungen
- CMS16P53Dokument32 SeitenCMS16P53kowinthawNoch keine Bewertungen
- Chapter 2 - The 8051 Microcontroller (Students)Dokument44 SeitenChapter 2 - The 8051 Microcontroller (Students)Norsyazwani Abdul RashidNoch keine Bewertungen
- Unit 1Dokument27 SeitenUnit 1meetsanthoshNoch keine Bewertungen
- SDM Module IDokument28 SeitenSDM Module IKiran KrishnanNoch keine Bewertungen
- MPMC AnswersDokument10 SeitenMPMC AnswersMuralicheenuNoch keine Bewertungen
- 7 Segment N LCDDokument38 Seiten7 Segment N LCDBaishakhi Bose100% (1)
- Part 1Dokument30 SeitenPart 1ady63100% (1)
- User Manual Experiments)Dokument96 SeitenUser Manual Experiments)Rroy JainNoch keine Bewertungen
- PDF 1Dokument17 SeitenPDF 1Nivedita Acharyya 2035Noch keine Bewertungen
- EE2356Dokument104 SeitenEE2356Vijayapriya RamachandranNoch keine Bewertungen
- Mpi 11002Dokument21 SeitenMpi 11002alkesh.eng0% (1)
- Lecture Microcontroller OverviewDokument55 SeitenLecture Microcontroller OverviewSamira El MargaeNoch keine Bewertungen
- TRISC 0 // Set Direction To Be Output 0 Output 1 InputDokument7 SeitenTRISC 0 // Set Direction To Be Output 0 Output 1 Inputiri_scribdNoch keine Bewertungen
- New Embedded Manual 2020Dokument75 SeitenNew Embedded Manual 2020malikabdullah1082Noch keine Bewertungen
- Electronics Club, IIT Delhi 16 Feb, 2014Dokument34 SeitenElectronics Club, IIT Delhi 16 Feb, 2014Ankit KumarNoch keine Bewertungen
- QB MP 8086, Microprocessor Lab Manual Viva QuestionsDokument12 SeitenQB MP 8086, Microprocessor Lab Manual Viva QuestionsVinayNoch keine Bewertungen
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationVon EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNoch keine Bewertungen
- Zdo13 9701 01Dokument19 SeitenZdo13 9701 01Henri Kuiper100% (1)
- Acer Travelmate 5730/5630 - Service ManualDokument176 SeitenAcer Travelmate 5730/5630 - Service ManualHiranAmarasingheNoch keine Bewertungen
- Introduction To Java Programming (For Novices & First-Time Programmers)Dokument14 SeitenIntroduction To Java Programming (For Novices & First-Time Programmers)MrBNoch keine Bewertungen
- SQLDokument9 SeitenSQLMeron VingioNoch keine Bewertungen
- Community RulesrtfDokument602 SeitenCommunity Rulesrtflwdkfjlk23j4Noch keine Bewertungen
- Downgrade Windows8 OriDokument4 SeitenDowngrade Windows8 OriZamer AfiqNoch keine Bewertungen
- Ec - 501 - Microprocessor and Its ApplicationDokument41 SeitenEc - 501 - Microprocessor and Its ApplicationDr Nikita ShivhareNoch keine Bewertungen
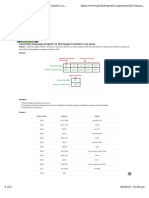
- Assembly Language Program To Find Largest Number in An ArrayDokument2 SeitenAssembly Language Program To Find Largest Number in An ArrayAldrin RogenNoch keine Bewertungen
- Notebook Computer LIFEBOOK U748 Datasheet - enDokument6 SeitenNotebook Computer LIFEBOOK U748 Datasheet - enJosé VargasNoch keine Bewertungen
- ACI Muti-PodDokument59 SeitenACI Muti-PodAlisamiirNoch keine Bewertungen
- ZTE Quick Commissioning GuidelinesDokument149 SeitenZTE Quick Commissioning GuidelinesKamlesh MehtaNoch keine Bewertungen
- ¡ IMS 8.2¡¿SPG2800 Version Differences (Between R3C02 and R3C01)Dokument23 Seiten¡ IMS 8.2¡¿SPG2800 Version Differences (Between R3C02 and R3C01)sirjimyNoch keine Bewertungen
- airOS UG V80 PDFDokument56 SeitenairOS UG V80 PDFAizat Izham SatriaNoch keine Bewertungen
- AzureDokument58 SeitenAzurezeeshankaizerNoch keine Bewertungen
- Introduction To Computer L-1Dokument51 SeitenIntroduction To Computer L-1Md Safayet IslamNoch keine Bewertungen
- 05 - Junior Network Adm - Bahan AjarDokument18 Seiten05 - Junior Network Adm - Bahan AjarGaizka FusthuNoch keine Bewertungen
- Spirent IMS-SIP ToolkitDokument4 SeitenSpirent IMS-SIP ToolkitWewe SlmNoch keine Bewertungen
- Pic18 Hardware InterfacingDokument9 SeitenPic18 Hardware Interfacingadamwaiz100% (2)
- LogDokument126 SeitenLogsyuhada sahiraNoch keine Bewertungen
- Microsoft Dynamics AX Build NumbersDokument24 SeitenMicrosoft Dynamics AX Build NumbersMohammed Hassan AazabNoch keine Bewertungen
- BRKSPM 2743Dokument62 SeitenBRKSPM 2743Estevao JoseNoch keine Bewertungen
- 5.3.2.8 Packet Tracer - Examine The ARP TableDokument6 Seiten5.3.2.8 Packet Tracer - Examine The ARP TableLuis Alberto MoretaNoch keine Bewertungen
- Redis TutorialDokument199 SeitenRedis TutorialwilmertorresdNoch keine Bewertungen
- Installing Oracle Database 11gDokument12 SeitenInstalling Oracle Database 11gSeshadri Venkata KrishnaNoch keine Bewertungen
- NE9000 Product and Hardware Features IntroductionDokument80 SeitenNE9000 Product and Hardware Features IntroductionEDWIN JAMINoch keine Bewertungen
- NPR Mid-Term Project Report: Multi-Client Chat Application Using TCP Java SocketDokument7 SeitenNPR Mid-Term Project Report: Multi-Client Chat Application Using TCP Java SocketHoàng Ko KoNoch keine Bewertungen
- 54Mbps Wireless-G Router User's GuideDokument69 Seiten54Mbps Wireless-G Router User's GuideJuan Carlos CattarossiNoch keine Bewertungen
- CC102 - Module 1Dokument2 SeitenCC102 - Module 1Judielyn CualbarNoch keine Bewertungen
- Gigabyte G292-2G0 User ManualDokument113 SeitenGigabyte G292-2G0 User ManualddscribeNoch keine Bewertungen