Das könnte Ihnen auch gefallen
- Founding of Switzerland's First Independent Neurological JournalDokument14 SeitenFounding of Switzerland's First Independent Neurological Journalssheldon_222Noch keine Bewertungen
- Two-Way Anova Using SPSSDokument13 SeitenTwo-Way Anova Using SPSSssheldon_222Noch keine Bewertungen
- Equations For Linear RegressionDokument3 SeitenEquations For Linear Regressionssheldon_222Noch keine Bewertungen
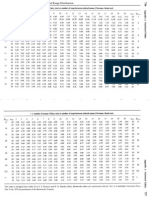
- TableA4 StudentizedRangeDistributionDokument1 SeiteTableA4 StudentizedRangeDistributionssheldon_222Noch keine Bewertungen
- The Distinction Between Fixed and Random EffectsDokument6 SeitenThe Distinction Between Fixed and Random Effectsssheldon_222Noch keine Bewertungen
- TableA3 Bonferoni F DistributionDokument1 SeiteTableA3 Bonferoni F Distributionssheldon_222Noch keine Bewertungen
- Two-Way Mixed Effects ModelsDokument6 SeitenTwo-Way Mixed Effects Modelsssheldon_222Noch keine Bewertungen
- Type 1 and Type 3 SS M&D TablesDokument2 SeitenType 1 and Type 3 SS M&D Tablesssheldon_222Noch keine Bewertungen
- Formulae For Calculating IDI and NRIDokument8 SeitenFormulae For Calculating IDI and NRIssheldon_222Noch keine Bewertungen
- Ordinary Least Squares Regression and Regression DiagnosticsDokument73 SeitenOrdinary Least Squares Regression and Regression Diagnosticsssheldon_222Noch keine Bewertungen
- Summary of Four Mixed-Model ApproachesDokument2 SeitenSummary of Four Mixed-Model Approachesssheldon_222Noch keine Bewertungen
- The Concepts of Linear Dependence - Independence and OrthogonalityDokument6 SeitenThe Concepts of Linear Dependence - Independence and Orthogonalityssheldon_222Noch keine Bewertungen
- Sum of Squares & DFs For Each Effect in A Split-Plot DesignDokument1 SeiteSum of Squares & DFs For Each Effect in A Split-Plot Designssheldon_222Noch keine Bewertungen
- Sum of Squares and Degrees of Freedom For Each Effect in A Two-Way Within-Subjects DesigDokument1 SeiteSum of Squares and Degrees of Freedom For Each Effect in A Two-Way Within-Subjects Desigssheldon_222Noch keine Bewertungen
- Some Multiple Comparison Procedures I - Fisher LSD TestDokument4 SeitenSome Multiple Comparison Procedures I - Fisher LSD Testssheldon_222Noch keine Bewertungen
- Some Multiple Comparison Procedures II - Bonferroni and Related ApproachesDokument7 SeitenSome Multiple Comparison Procedures II - Bonferroni and Related Approachesssheldon_222Noch keine Bewertungen
- Refcard RmsDokument2 SeitenRefcard Rmsssheldon_222Noch keine Bewertungen
- Some Multiple Comparison Procedures III - Tukey HSD and Scheffe TestsDokument11 SeitenSome Multiple Comparison Procedures III - Tukey HSD and Scheffe Testsssheldon_222Noch keine Bewertungen
- Counts & Proportions-Logistic and Log-Linear ModelsDokument58 SeitenCounts & Proportions-Logistic and Log-Linear Modelsssheldon_222Noch keine Bewertungen
- Lecture Numerical OptimizationDokument22 SeitenLecture Numerical Optimizationssheldon_222Noch keine Bewertungen
- R Refcard RegressionDokument6 SeitenR Refcard Regressionshadydogv5Noch keine Bewertungen
- Presentation - R Package eRMDokument40 SeitenPresentation - R Package eRMssheldon_222100% (1)
- Quntification of Brain Morphometry and Anatomical Change in NeonatesDokument44 SeitenQuntification of Brain Morphometry and Anatomical Change in Neonatesssheldon_222Noch keine Bewertungen
- ARVO PresentationDokument45 SeitenARVO Presentationssheldon_222Noch keine Bewertungen
- Sudoku SolverDokument1 SeiteSudoku SolveriPakistan100% (15)
- Honolulu SNRP 4-18-2008Dokument44 SeitenHonolulu SNRP 4-18-2008ssheldon_222Noch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Fluidized Bed CombustionDokument600 SeitenFluidized Bed Combustionvikasnar100% (7)
- BHEL Haridwar Block 2 Heavy Fabrication, Training ReportDokument53 SeitenBHEL Haridwar Block 2 Heavy Fabrication, Training ReportUdit Soni100% (5)
- Z I ARO: Applications of Axial and Radial Compressor Dynamic System ModelingDokument262 SeitenZ I ARO: Applications of Axial and Radial Compressor Dynamic System ModelingRamzi BrkNoch keine Bewertungen
- GEAS 1 - Chemistry - 2Dokument4 SeitenGEAS 1 - Chemistry - 2Leoneil Angelo AbreuNoch keine Bewertungen
- cO2CH4 Permselective GassensorDokument5 SeitencO2CH4 Permselective GassensorKartik RamasubramanianNoch keine Bewertungen
- Review: Modeling Damping in Mechanical Engineering StructuresDokument10 SeitenReview: Modeling Damping in Mechanical Engineering Structuresuamiranda3518Noch keine Bewertungen
- Precision Thermometers CatalogueDokument44 SeitenPrecision Thermometers CataloguemarthaNoch keine Bewertungen
- Induction Heating - VerDokument2 SeitenInduction Heating - Verdenivaldo2009Noch keine Bewertungen
- Solving The Simandoux EquationDokument15 SeitenSolving The Simandoux Equationjose_rarmenta100% (1)
- Newton's Laws of Motion Worksheet.Dokument2 SeitenNewton's Laws of Motion Worksheet.Llama jennerNoch keine Bewertungen
- Hough Transform in Matlab: - If We Find An Edge Point at (Ix, Iy), We Loop Through All Possible Values of ThetaDokument11 SeitenHough Transform in Matlab: - If We Find An Edge Point at (Ix, Iy), We Loop Through All Possible Values of ThetaLe QuyenNoch keine Bewertungen
- Trư NG Thcs : Question IV. Find and Correct The Mistake in Each Sentence. (1p)Dokument2 SeitenTrư NG Thcs : Question IV. Find and Correct The Mistake in Each Sentence. (1p)Anh ThưNoch keine Bewertungen
- SMS LteaDokument11 SeitenSMS LteaArdi CikaNoch keine Bewertungen
- 4-1 r14Dokument12 Seiten4-1 r14hafizgNoch keine Bewertungen
- Lilin Downhole MotorDokument35 SeitenLilin Downhole MotorIAN.SEMUT100% (2)
- 2 B.tech Biotechnology 27 38Dokument38 Seiten2 B.tech Biotechnology 27 38Anju GuptaNoch keine Bewertungen
- Conversion RPM G CentrifugaDokument1 SeiteConversion RPM G CentrifugaEsaú E RodriguezNoch keine Bewertungen
- Acids and Bases: Answers To Worked ExamplesDokument12 SeitenAcids and Bases: Answers To Worked ExamplesDana CapbunNoch keine Bewertungen
- Ssph011 Session 15 Biomechanic Moments (Torque) and ElasticityDokument55 SeitenSsph011 Session 15 Biomechanic Moments (Torque) and ElasticityPortia NyakaneNoch keine Bewertungen
- Is 7246Dokument10 SeitenIs 7246Gaurav AgarwalNoch keine Bewertungen
- TCL Air Conditioner Service ManualDokument138 SeitenTCL Air Conditioner Service ManualFabian EtcheniqueNoch keine Bewertungen
- Introducing JiFi ST Petersburg 2014Dokument4 SeitenIntroducing JiFi ST Petersburg 2014danjohhnNoch keine Bewertungen
- Thermal Engineering PDFDokument76 SeitenThermal Engineering PDFKartik KuriNoch keine Bewertungen
- NTMM LAB: MATERIAL REMOVAL RATE TEST ON ULTRASONIC MACHINEDokument23 SeitenNTMM LAB: MATERIAL REMOVAL RATE TEST ON ULTRASONIC MACHINETarundeep SinghNoch keine Bewertungen
- Design of Masonry StructuresDokument10 SeitenDesign of Masonry StructuresmuhammedNoch keine Bewertungen
- 11 TransportationDokument61 Seiten11 TransportationWindi Astuti0% (1)
- Carrefour-SA Shopping Center TurkeyDokument2 SeitenCarrefour-SA Shopping Center TurkeyVineet JogalekarNoch keine Bewertungen
- Bosch L Jetronic Injection Technical Instructions PDFDokument40 SeitenBosch L Jetronic Injection Technical Instructions PDFjorge Angel LopeNoch keine Bewertungen
- GE Gas Turbine IGV AngleDokument10 SeitenGE Gas Turbine IGV AngleSamir BenabdallahNoch keine Bewertungen