Das könnte Ihnen auch gefallen
- Baumappe HAVOFAST StudioDokument2 SeitenBaumappe HAVOFAST StudioAntonioPalloneNoch keine Bewertungen
- 000511099ML05 VC cm2000Dokument20 Seiten000511099ML05 VC cm2000Andreas FechtNoch keine Bewertungen
- SPYRIT Notice - t2m - t5146Dokument14 SeitenSPYRIT Notice - t2m - t5146Hubert DptNoch keine Bewertungen
- Mega Bloks - Dragons Krystal Wars - 9891 - Vorgan StrongholdDokument48 SeitenMega Bloks - Dragons Krystal Wars - 9891 - Vorgan StrongholdGiorGiorGioNoch keine Bewertungen
- User Manual PDFDokument58 SeitenUser Manual PDFChahi NdaNoch keine Bewertungen
- ALG 636 Schnell-Ladegerät - Hartig + Helling GMBH & Co. KG Incarcator BateriiDokument15 SeitenALG 636 Schnell-Ladegerät - Hartig + Helling GMBH & Co. KG Incarcator BateriiLeonid SlavovNoch keine Bewertungen
- Anleitung HTDC5000 1242500Dokument36 SeitenAnleitung HTDC5000 1242500Dragana SavićNoch keine Bewertungen
- Sirus Pro PS-1802Dokument1 SeiteSirus Pro PS-1802Anonymous dhbccYnzGzNoch keine Bewertungen
- C 500Dokument8 SeitenC 500Erdner GerhardNoch keine Bewertungen
- ALC2000 AkkuladegerätDokument9 SeitenALC2000 AkkuladegerätKönigsederrNoch keine Bewertungen
- Medion ElectricalDokument210 SeitenMedion Electricaldario tominac67% (3)
- Zylinder Deenesfr PDFDokument3 SeitenZylinder Deenesfr PDFRichard De Medeiros Castro100% (1)
- SGDM 1 PDFDokument2 SeitenSGDM 1 PDFDante WilliamsNoch keine Bewertungen
- Instruccions f923 925 925rf 970 970rfDokument36 SeitenInstruccions f923 925 925rf 970 970rftorrusco72Noch keine Bewertungen
- MKE 600 User ManualDokument60 SeitenMKE 600 User ManualRaul Ferreira GoebelNoch keine Bewertungen
- MRS Electronic GMBH & Co. KG - ProduktkatalogDokument313 SeitenMRS Electronic GMBH & Co. KG - ProduktkatalogMihai Popa100% (1)
- MH64 1023 MUiDokument1 SeiteMH64 1023 MUiweldsaidiNoch keine Bewertungen
- MessBlatt 210102374Dokument5 SeitenMessBlatt 210102374Andrei 26Noch keine Bewertungen
- Lista de Precios Consumo 10 Noviembre 2023 DifunDokument148 SeitenLista de Precios Consumo 10 Noviembre 2023 DifunBALLEN PINZON YEISON ALIRIONoch keine Bewertungen
- LiPo-Akku Laden Und PflegenDokument5 SeitenLiPo-Akku Laden Und PflegenmodellbaunetNoch keine Bewertungen
- BQ CC50Dokument8 SeitenBQ CC50kleiberNoch keine Bewertungen
- Pylontech GarantieDokument3 SeitenPylontech GarantieRo GergNoch keine Bewertungen
- Bedienungsanleitung Anybook VorlesestiftDokument2 SeitenBedienungsanleitung Anybook VorlesestiftShadman Shakib RiyadhNoch keine Bewertungen
- Tachometer Diesel AlternatorDokument6 SeitenTachometer Diesel AlternatorMahdi DehghankarNoch keine Bewertungen
- 2A-3 Mattei ElektroschemaDokument9 Seiten2A-3 Mattei ElektroschemaJesus VergaraNoch keine Bewertungen
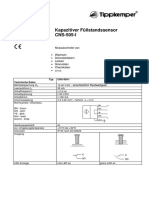
- Kapazitiver Füllstandssensor CNS-505-I: Niveaukontrolle Von: Wachsen Schmelzklebern Lacken Granulaten Chemikalien U.V.ADokument2 SeitenKapazitiver Füllstandssensor CNS-505-I: Niveaukontrolle Von: Wachsen Schmelzklebern Lacken Granulaten Chemikalien U.V.AАлександр КачеишвилиNoch keine Bewertungen
- 201055-an-01-ml-SCHNELLLADEGERAET UFC 5 LCD de en FR NLDokument14 Seiten201055-an-01-ml-SCHNELLLADEGERAET UFC 5 LCD de en FR NLjeanyoperNoch keine Bewertungen
- Alcotest 6820Dokument40 SeitenAlcotest 6820VallHebron HospitalNoch keine Bewertungen
- Sirius Soft Starter 1Dokument22 SeitenSirius Soft Starter 1Javier SordoNoch keine Bewertungen