Das könnte Ihnen auch gefallen
- Langenscheidt - Grammatik Intensivtrainer b1 LösungenDokument4 SeitenLangenscheidt - Grammatik Intensivtrainer b1 LösungenVinicius Passos100% (8)
- 2 - Punktierte Noten - AufgabenDokument1 Seite2 - Punktierte Noten - AufgabenVinicius PassosNoch keine Bewertungen
- Kerb PDFDokument1 SeiteKerb PDFVinicius PassosNoch keine Bewertungen
- 4 - Punktierte Viertelnoten - AufgabenDokument1 Seite4 - Punktierte Viertelnoten - AufgabenVinicius PassosNoch keine Bewertungen
- HejoDokument1 SeiteHejoVinicius PassosNoch keine Bewertungen
- 1 - Punktierte NotenDokument1 Seite1 - Punktierte NotenVinicius PassosNoch keine Bewertungen
- 3 - Punktierte ViertelnotenDokument1 Seite3 - Punktierte ViertelnotenVinicius PassosNoch keine Bewertungen
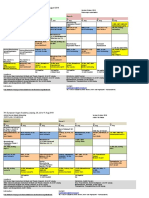
- Zeitplan Schedule OA 2019 Okt.18Dokument2 SeitenZeitplan Schedule OA 2019 Okt.18Vinicius PassosNoch keine Bewertungen
- BS Musik InfoblattDokument1 SeiteBS Musik InfoblattVinicius PassosNoch keine Bewertungen
- Musik Beschreiben IDokument2 SeitenMusik Beschreiben IVinicius PassosNoch keine Bewertungen
- InformationenfuerauslaendischebewerberDokument6 SeitenInformationenfuerauslaendischebewerberVinicius PassosNoch keine Bewertungen
- Arp PDFDokument1 SeiteArp PDFVinicius PassosNoch keine Bewertungen
- Vinicius - Zusammen Lernen. Ein Positiver Weg 2Dokument1 SeiteVinicius - Zusammen Lernen. Ein Positiver Weg 2Vinicius PassosNoch keine Bewertungen
- Die RennmausDokument1 SeiteDie RennmausVinicius PassosNoch keine Bewertungen
- Anforderungen Aufnahmepruefung 2019 2Dokument26 SeitenAnforderungen Aufnahmepruefung 2019 2Vinicius PassosNoch keine Bewertungen
- ST41 Ihr DAAD Stipendium HWK 2017Dokument4 SeitenST41 Ihr DAAD Stipendium HWK 2017Vinicius PassosNoch keine Bewertungen
- Li Cento Concerti: EcclesiasticiDokument12 SeitenLi Cento Concerti: EcclesiasticiVinicius PassosNoch keine Bewertungen
- UntitledDokument30 SeitenUntitledVinicius PassosNoch keine Bewertungen
- WiderrufsformularDokument1 SeiteWiderrufsformularVinicius PassosNoch keine Bewertungen
- WiderrufsformularDokument1 SeiteWiderrufsformularVinicius PassosNoch keine Bewertungen
- AGB - WiderrufsbelehrungDokument4 SeitenAGB - WiderrufsbelehrungVinicius PassosNoch keine Bewertungen
- 12.04.18.muster Motivationsschreiben Medizin PDFDokument3 Seiten12.04.18.muster Motivationsschreiben Medizin PDFVinicius PassosNoch keine Bewertungen
- Vinicius - Humanitäre Notlage Die Situation Der Haitianischen Flüchtlinge in BrasilienDokument1 SeiteVinicius - Humanitäre Notlage Die Situation Der Haitianischen Flüchtlinge in BrasilienVinicius PassosNoch keine Bewertungen
- Hotelliste Stadtplan Juni 2017Dokument2 SeitenHotelliste Stadtplan Juni 2017Vinicius PassosNoch keine Bewertungen
- VN4HACDokument1 SeiteVN4HACVinicius PassosNoch keine Bewertungen
- Vinicius - Zusammen Lernen. Ein Positiver Weg 2Dokument1 SeiteVinicius - Zusammen Lernen. Ein Positiver Weg 2Vinicius PassosNoch keine Bewertungen
- IMSLP127823 WIMA.7349 01 EinzugDokument3 SeitenIMSLP127823 WIMA.7349 01 EinzugVinicius PassosNoch keine Bewertungen
- Deutschland Stipendium Datenbank de 1 0 Zusaetzliche Hinweise Fuer Daad Studienstipendien Im Fachbereich MusikDokument3 SeitenDeutschland Stipendium Datenbank de 1 0 Zusaetzliche Hinweise Fuer Daad Studienstipendien Im Fachbereich MusikVinicius PassosNoch keine Bewertungen
- Kirnberger - Sonata 5Dokument24 SeitenKirnberger - Sonata 5Vinicius PassosNoch keine Bewertungen
- TGISS22 Serie08 LSGDokument5 SeitenTGISS22 Serie08 LSGloveheartNoch keine Bewertungen
- Numerische Mathematik: Auslöschung Und RundungsproblematikDokument5 SeitenNumerische Mathematik: Auslöschung Und RundungsproblematikPhil100% (1)
- bs1 Skript Kapitel 3.7Dokument60 Seitenbs1 Skript Kapitel 3.7Rainer BrainNoch keine Bewertungen
- CLUSTALX2Dokument5 SeitenCLUSTALX2monikli15Noch keine Bewertungen
- bs1 Skript Kapitel 3.3Dokument18 Seitenbs1 Skript Kapitel 3.3Rainer BrainNoch keine Bewertungen
- bs1 Skript Kapitel 3.5Dokument18 Seitenbs1 Skript Kapitel 3.5Rainer BrainNoch keine Bewertungen
- Mit LaTeX Eine Konferenz OrganisierenDokument32 SeitenMit LaTeX Eine Konferenz OrganisierenUwe ZiegenhagenNoch keine Bewertungen
- FS Magazin No 02 2009Dokument68 SeitenFS Magazin No 02 2009Daniei LafuenteNoch keine Bewertungen