Beruflich Dokumente
Kultur Dokumente
Hydraulic Proportional Control Bosch Rexroth
Hochgeladen von
DavidCPOriginaltitel
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Hydraulic Proportional Control Bosch Rexroth
Hochgeladen von
DavidCPCopyright:
Verfügbare Formate
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen.
Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Design & Control of
Proportional and Servo Systems
Bosch Rexroth Industrial Hydraulics
Rob Decker & Dave Saaski
April 2008
Drive for Technology
CMA/Flodyne/Hydradyne, Inc.
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
History of Hydraulic Control
Mechanical No Electric
Flow Controls, Limit Switches
and Relay Logic
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Using Closed-loop Controllers
Examples of Closed Loop Controllers
Analog
Lower Cost
Computer not required for set-up or adjustment
Examples:
VT-MACAS (AVPC-V or AVPC-mA) - Position or Velocity Control Card
p/Q Cards Open Loop Flow, Closed Loop Pressure Control Card
Digital
HACD Hydraulic Axis Controller: Digital
HNC Hydraulic Numerical Controller
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
VT-MACAS (AVPC) Analog Velocity Position Control / V or mA
Material Number for
Voltage Command
= 0811405139
Material Number for
milliAmp Command
= 0811405140
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
VT-MACAS (AVPC) Analog Velocity Position Control / V or mA
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
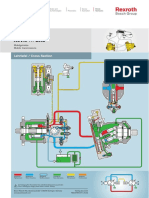
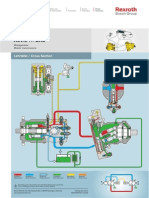
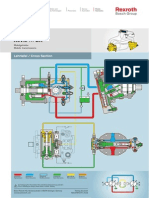
VT-MACAS (AVPC) Schematic
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
AVPC / Applications
Position Control
Velocity Control
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
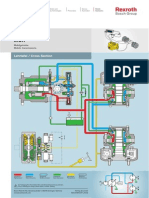
P/Q Cards with Valve Amplifier
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
P/Q Cards for Valves with OBE
F
r
o
n
t
P
l
a
t
e
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
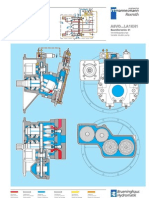
P/Q Card Applications
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Controller for the Pressure Difference (Force Control)
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
HACD
HACD (Hydraulic Axis
Controller - Digital)
Multi-loop 32-bit Digital
Controller
DeviceNet -
Available
CANOpen - In
development
PROFIBUS - In
development
New Generation
Upgrade of the DMX
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
HACD Technology: European + American Product Experience
1997 to 2003
Joint Development
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
6 analog Inputs, Voltage or Current
(selection via software)
2 analog Outputs, 1x voltage or current
(selection via software)
Digital Feedback
SSI or Incremental
8 digital inputs
(configuration via software)
7 digital outputs
(configuration via software)
Enable Input and OK Output
Display and Keys
Serial Interface RS 232
CAN Bus - DeviceNet and CANOpen
protocol
Bus Controllers - HACD
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
One Configuration Software for
all Applications
Editor for the Configuration of
the Control Structure
using predefined functions
(programming knowledge not
required)
Clearly arranged Settings
for commands, controller
parameters, analog and digital
I/O setup
Oscilloscope Function
also suitable as a
data recorder
Language Options
English / Deutsch
HACD - Setup Program
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Bus Controllers - HNC
HNC
Hydraulic Numerical Controller
32 Bit Multi-Axis Controller
User Programmed using NC G
codes
Bus Capability
PROFIBUS Available
CANOpen Available
SERCOS - Available
DeviceNet - In development
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
HNC Technology: Connectivity + Drive Control Options
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
HNC - Bus Applications
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
HNC with SERCOS interface
SERCOS interface
Noise immune fiber optic ring connection
Distributed drive architecture
Mode: Closed-loop position control
(SERCOS cycle time 2 ms)
Preferred and freely configurable messages
Special control algorithms for interpolating with
electro-hydraulic drives
HNC100 closes the control loop
Digital interfaces for measuring system
EnDat absolute, incremental, SSI
Command value feedforward via Sercos
HNC100 looks and acts like an electric servo to
the CNC
Robust SERCOS
fiber optic interface
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
MTX
CNC control
MTC 200
CNC control
Control and
Power
Electronics
Ecodri ve IDIAX Electrohydraulic actuator
controlled by the HNC
additional axes can be added
HRS
(HNC 100)
SERCOS
(command value
and actual value)
Electromagnetic motors Electrohydraulic actuator
Control and
Power
Electronics
Ecodri ve IDIAX Electrohydraulic actuator
controlled by the HNC
additional axes can be added
HRS
(HNC 100)
SERCOS
(command value
and actual value)
Electromagnetic motors Electrohydraulic actuator
HNC with SERCOS Interface
CNC control system solutions by Bosch Rexroth
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
HNC Technology: Demonstration and Development Tools
The Test Box comes with three Prj.-Files:
Demo_ana (analog Feedback)
Demo_ink (incremental Feedback)
Demo_abs (absolute SSI Feedback)
VT-HNC100DEMO
Refer to RD/RE 30133
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
History of Hydraulic Control
Proportional Valve, Limit Switches and
Relay Logic
Proportional Valve and Linear
Displacement Transducer
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
History of Hydraulic Control
Closed Loop Position Control with
Servo Solenoid Valve and Linear
Displacement Transducer
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Open Loop Systems vs. Closed Loop Systems
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Closed Loop System Components
Setpoint
Potentiometer
Set Point Card
PLC Analog
Output
Controller
AVPC
p/Q card
DMX
HACD
HNC
Amplifier
Amp Card
Amp Cube
OBE
Valve
p/Q
Overlap (W)
Zero Lap (V)
Actuator
Motor
Cylinder
Measuring Device
Pressure Transducer
Ultrasonic
LVDT
Encoder
Potentiometer
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
The Three Most Common Types of Control
Position Control
Velocity Control
Pressure Control
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Physics of Hydraulics
Hydraulic Stiffness
Example: Apply a 1 ton load to a cylinder.
The no-load position is 100 cm
Compare the cylinder
when filled with :
1. Oil
2. Water
3. Air
4. Steel
100 cm
A = 10 cm
2
P
L
= 0 bar
No Load
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Stiffness of Various Materials
Oil
X = 0.7 cm
P
L
= 100 bar
1T
99.3 cm
Water
X = 0.4 cm
P
L
= 100 bar
1T
99.6 cm
Air
X = 99 cm
P
L
= 100 bar
1T
1 cm
Steel
X = 0.002 cm
P
L
= 100 bar
1T
99.998 cm
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Solving Stiffness Limitations
In order to maintain a fixed cylinder position independent of load changes,
the following must be used:
1. Mechanical stops (metal to metal)
or
2. Closed loop control
The same conditions are true for a constant velocity drive. Again the
following solutions must be used:
1. Electric servo drive (Indramat)
or
2. Closed loop hydraulic drive using load sense, load
compensator or electro-hydraulic closed loop
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Example of Position Control
Command
F
Feedback
Error S
U
Controller
Control
Valve
Position Transducer
1. Mechanical-hydraulic
Closed loop
2. Electro-hydraulic
Closed loop
F
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Improving the System Stiffness
A four-way valve controls both sides of an actuator.
As a result, the load is held between two springs . With this configuration,
the spring-constant is higher !
Note: See Rexroth Hydraulic Trainer Vol. 2 or Using
Industrial Hydraulics for more details.
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Positioning with Higher Stiffness
1. Mechanical-hydraulic
2. Electro-hydraulic
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
What Impacts Machine Design ?
How does a real hydraulic drive differ from an ideal drive?
Response
The ideal or linear drive converts all input (command) signals
into output signals without delays or distortions.
Examples of input signals can be:
On / Off, Stop / Go
Analog voltages
PLC program I/O
Example: A rod or a lever converts inputs directly into
corresponding outputs.
In Out
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Spring Mass Systems Respond Differently
m
T
As we will see later, hydraulic drives are spring-mass systems.
Spring-mass systems have two observable properties:
1. Natural frequency
2. Damping
Example:
1. The number of oscillations per second is the natural frequency
f
o
2. After time, the oscillation decays due to damping.
T =
1
f
o
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Predicting the Natural Frequency
The natural frequency is determined solely by:
Spring constant C of the drive
Mass M coupled to the drive
Why should the natural frequency be high as possible ?
A simple experiment will show:
Every machine has mass and is not completely rigid.
Consequently all machines are spring-mass systems.
Take a machine axis with a given f
o
, and oscillate it
between two defined positions, 0 and 10.
f
o
=
2
C
M
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Machine Limits Imposed by Natural Frequency
If we move the axis slowly", the machine will respond ideally, i.e. it
moves from 0 to 10, as commanded.
If we increase the number of cycles per second, the machine output will
increase in stroke! This can be dangerous and destructive to the
machine!
Every machine has a limit of operation. If we exceed this limit, the
natural frequency of the machine is approached, and the machine
starts to resonate at that natural frequency.
This MUST be avoided; BAD things will happen.
http://timber.ce.wsu.edu/supplements/seismic/frequency.htm
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Benefits of Damping
Increasing damping or,
How to Control Resonant Response
If damping is increased in a spring-mass system, amplitude increase or
overshoot can be reduced.
The graph that follows shows how our experiment varies if we increase
damping.
To understand the effect, visualize the previous experiment with the
moving components immersed in:
Water (d 0.5)
Honey (d 2)
Hot tar (d 20)
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Effect of Increased Damping
A damping ratio of d 0.7 results
in the best overall response.
Unfortunately, by increasing
damping, another problem occurs:
A time delay between the input
and output, so-called phase-lag,
increases.
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
How to increase damping:
Dissipate kinetic energy by converting it into heat, known as
passive damping (used in car shock absorbers) or;
Actively counter the kinetic energy using a closed loop feedback to
cancel oscillations, called active damping. Both methods are
used in systems today.
Improving Damping
Note: A hydraulic machine
drive will normally have a
damping ratio between 0.05 ~
0.4, and will respond
accordingly.
Proportional valves and servo
valves are designed with
damping ratios of 0.75. They
exhibit no overshoot.
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
What Creates Damping
Note: It would appear that increasing friction is a simple way to increase
passive damping. This is a trap! Mechanical friction can be high at low speeds
(breakaway friction), and lower at higher speeds (running friction). High
breakaway friction deteriorates a systems performance and must be
minimized! Use of low friction PTFE cylinder seals, lubrication, hydrostatic
bearings, etc. is normally recommended for this reason.
Passive damping is present due to internal leakage
Laminar Flow
Q
F
L1
p
p
=
R
L
A
M
Q
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Passive Damping
Leakage caused by cylinder seal leakage, bypass
valves, and valve null-flow, resulting from under-
lapped spools, improves damping.
Disadvantages:
Loss of energy (efficiency)
Decreased static accuracy
Turbulent Flow
U
o
Sharp-edge
Orifice
Bypass
Valve
Valve
Under-
lapped
Spool
Q
F
L1
p
p
=
R
t
u
r
b
Q
2
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Example of Active Damping using Pressure Feedback
The (simplified) circuit shows an aircraft actuator in closed loop position control.
A step-load can cause oscillation, dependent on the system gain.
( lever ratio in this example)
B
A
P T
Active Damping
B
A
Command
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
P T
Orifice
Volume
Modulator to Provide Active Damping
A so-called modulator is added to the system. Pressure increases caused by
step-load changes allow the lever support to move. Response time and amplitude
of the modulator piston is determined by an orifice and a small accumulator. A high
damping is created with this type of control (P-DT
1
control).
This idea is 80 years old!
In some applications today, an electronic
equivalent is used, also known as active
damping, or state variable control.
Modulator
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Designing for Performance
Components
When designing a hydraulic drive, it is essential to consider both static
and dynamic characteristics of the drives.
For example:
If a constant load is applied to an actuator, it will deflect, as seen
earlier. The spring constant of the drive is calculated as:
E = bulk modulus of the fluid
A = area of cylinder
V
o
= total compressed volume
C =
E A
2
V
o
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Stiffness of Actuators
Therefore:
F = load
X = deflection
The result is the deflection under load, or the stiffness.
If a load is suddenly applied to the drive, or the load is accelerated
dynamically, it will respond like a spring - mass system, and the dynamic
properties will be dominant.
Selecting a cylinder should be based on both the static and dynamic
requirements:
C =
F
X
X =
F
C
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Defining Drive Requirements
1. Static:
- Balance of forces, i.e. the cylinder must have enough force to hold
and move the load
F = p A
- Rod buckling must be considered. The cylinder attachment design
or rod diameter should be changed if required.
2. Dynamic:
- The drive should have sufficient dynamic response to accommodate
load changes and accelerations.
As seen earlier in a bode-plot, a drive will appear to be rigid and
have minimal adverse dynamic effects when operated below its
limit frequency.
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Determining Performance Requirements
When designing a hydraulic drive system, it is desirable to have the
natural frequency as high as possible, while staying within the allocated
budget.
Rule of thumb for good design:
A hydraulic designer can only improve the natural frequency of the drive
by varying the cylinder size, and minimizing the pipe length between
cylinder and the valve.
NOTE: M (mass) is not measured in pounds in English units. Rather
M(mass) = F (lbs)/A (in./sec
2
)
= (lbs.)/(32.16 (ft./ sec
2
) x 12 (in./ft))
= (lbs.) / 386 (in./ sec
2
)
C =
E A
2
V
o
f
o
= ,
2
C
M
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Design Guidelines
P T
A B
F
A quick approach for finding an optimal cylinder:
1. Calculate F = p A
2. Check for rod buckling
Typical Arrangement
Single rod cylinder with pipe
connections to the valve
f
o
calculation is difficult
Simplified Approximation
Equal area cylinder
(added rod results in
lower f
o
)
Eliminate pipe volume by
mounting valve directly on
the cylinder (improve f
o
)
P T
A B
F
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Rule of Thumb Selection
Assuming the two changes in the above approximation cancel each other,
the value of V
o
(cylinder centered) is:
Since:
Result:
V
o
= A
A
S/2
A
A
= Annulus Area
S = Stroke
f
o
=
2
C
M
C = C
1
+ C
2
C
1
= C
2
=
E A
2
V
o
V
o
= A
A
S/2
f
o
=
2 E A
A
S/2 M
2
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Typical Machine Requirements
Therefore:
This formula provides an annulus area of the cylinder required for a
desirable natural frequency.
The following are experience based guidelines:
f
o
< 4 Hz Poor dynamics, good static performance only
f
o
15 Hz Good frequency for general machine designs
f
o
30 Hz Needed for machines requiring high dynamics
A
A
=
f
o
2
2
S M
E
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Hydraulic Motor Estimation
The same rules apply to hydraulic motor drives:
I = Rotating inertia
Note: If a difference of opinion arises, such as the machine designer
insisting on using a small cylinder operating at high pressure, but
calculations dictate a larger cylinder and lower pressures, you can
compare the alternatives with a simulation program, such as HYVOS by
BoschRexroth
q =
f
o
2
4
4
I
E
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Machine Considerations
ATTENTION!
In many designs,
the mass M is not
directly driven by
the actuator.
In the examples shown here, the effective
mass or inertia must be calculated. The
effective value seen by the actuator
(reflected inertia) is the (lever-ratio)
2
or (gear-ratio)
2
!
Therefore:
Valve
m
M
x
y
M
x
y
M
r
M
EFF
= M ( )
2
x
y
J
EFF
J
EFF
= M (r)
2
N in
N out
N = rpm
n =
N out
N in
M
EFF
= M ( )
2
x + y
y
J
EFF
= ( )
2
M
2P
P = pitch =
in
rev
J
EFF
= J (n)
2
f
o
=
2
C
M
EFF
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Machine Stiffness
Important Note:
If the driven machine structure is flexible (typically the case), the result
is a complex pair of 2nd order spring - mass systems (4th order and
higher in most situations). Manual calculation of these systems is very
tedious. Machine designers should always try to make the driven
structure as rigid as possible.
A goal is to have the natural frequency of the driven structure be 3
times higher than the hydraulic drives natural frequency. With this
ratio, the machines dynamic response will have a minimal influence on
the overall drive performance. When the ratio is 10:1, the machine can
be considered a rigid structure, and not be a factor in the drives design.
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Valve Sizing
1. Pressure Drop
Pressure drop (p) is defined as the difference between the system
(pump) pressure and the load pressure.
Load pressure can only be measured directly when a meter- in
throttle circuit is used.
Example 1:
p
L
=
F
A
p
p
V
= p
P
p
L
F
p
L
Q
P
V
p
P
= 100%
A
P
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Pressure Drop with 2 Orifices
It is obvious that the pressure drop is not selected by the designer. It
is a function of the system pressure and the load applied to the actuator.
Example 2:
F
p
A
Q
p
1
p
P
= 100%
p
2
p
B
p
L
= p
A
p
B
=
F
A
A
p
1
= p
2
(Also applies to Hydraulic Motors)
p
v
= 2 p
1
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
p
P
A
p
F
A
A
Meter Out and Double Throttles
Example 3:
Example 4:
p
V
= p
B
=
F
Q
P
1
p
P
= 100%
p
B
A
P
= Piston area
A
A
= Annulus area
F
p
A
Q
1
p
1
p
P
= 100%
p
2
p
B
p
v
= p
1+
p
2
for Q
1
p
P
A
p
F
A
p
+
p
1
=
A
A
2
=
A
p
A
A
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
How to Find the Proper Valve
Flow ratings of proportional valves are the rated flow at a NOMINAL
pressure drop, and normally have nothing to do with actually sizing a
proportional valve.
First, we need to calculate the ACTUAL p
V
for the specific system.
After calculating the p
V
, refer to a valve data sheet.
Example 4: Flow Q = 450 l/min
Pump-pressure p
P
= 210 bar
Force F = 3600 daN
Cylinder A
p
= 20cm
2
A
A
= 10 cm
2
= 2
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Which Proportional Valve do we choose?
p
1
=
p
P
A
p
F
A
p
+
A
A
2
p
1
=
(3000 psi 3.1 in
2
) 7920 LB
3.1 in
2
+ 0000
1.6 in
2
2
2
p
1
= 394 psi
For a 2:1 cylinder ( = 2), we choose a
2:1 valve (Q
A
:Q
B
= 2), Then, p
1
= p
2
and:
p
V
= 2 p
V1
= 788 psi (= 54 bar)
RA 29 115
Page 13-14
4WRZ valve
WRZ 16 is too small
WRZ 25 E 220 is 92% open
WRZ 25 E 325 is 78 % open
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Spool Flow Characteristics
Characteristic curves (measured with spools E, W6-, EA, W6A at v = 46 mm
2
/s and v = 40 C) Size 16
150 L/min nominal flow with a 10 bar valve pressure differential
1 p = 10 bar constant
2 p = 20 bar constant
3 p = 30 bar constant
4 p = 50 bar constant
5 p = 100 bar constant
(80)
(320)
(460)
5
4
3
2
1
(400)
(240)
(160)
100 80 70 60 50 40 30 20 15 90
21.1
84.5
121.5
0
105.7
63.4
42.3
PA / B T
or
PB / A T
Command value in %
788 PSI
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Spool Flow Characteristics
Characteristic curves (measured with spools E, W6-, EA, W6A at v = 46 mm
2
/s and v = 40 C) Size 25
220 L/min nominal flow with a 10 bar valve pressure differential
1 p = 10 bar constant
2 p = 20 bar constant
3 p = 30 bar constant
4 p = 50 bar constant
5 p = 100 bar constant
325 L/min nominal flow with a 10 bar valve pressure differential
(200)
(100)
(300)
(400)
(500)
5
4
3
2
1
(800)
(700)
(600)
100 80 70 60 50 40 30 20 15
90
52.8
26.4
79.3
106.0
132.0
0
211.0
185.0
159.0
Command value in %
PA / B T
or
PB / A T
788 PSI
(200)
(100)
(300)
(400)
(500)
(870)
5
4
3
2
1
(800)
(700)
(600)
100 80 70 60 50 40 30 20 15 90
52.8
26.4
79.3
106.0
132.0
0
211.0
185.0
159.0
230.0
Command value in %
PA / B T
or
PB / A T
788 PSI
1 p = 10 bar constant
2 p = 20 bar constant
3 p = 30 bar constant
4 p = 50 bar constant
5 p = 100 bar constant
p = Valve pressure differential to DIN 24
311 (input pressure p
P
minus load pressure
p
L
minus return line pressure p
T
)
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Data Sheet Ratings
As shown, the available pressure drop across
the valve is a result of pump pressure and load
pressure. Data sheets typically give a nominal
flow at a nominal pressure drop. There are two
de facto standards used in the hydraulics industry
to define the flow through a control valve:
Servo & High-Response Proportional Valves
A pressure drop P
v
= 1000 PSI (70 bar) is
used. When the valve is open 100%, the
measured flow is the nominal flow at
1000 PSI total pressure drop.
Proportional Valves
A pressure drop P
v
= 145 PSI (10 bar) is
used. The valve is opened from zero to
maximum. The typically non-linear flow
characteristic is recorded.
p
P
= 70 bar
Q
Nom
Pressure Drop Test Circuit
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Valve Pressure Drop Rating
We use the sharp-edged orifice equation and the valve flow rating
to determine the flow at the pressure drop of our system.
Q
2
= Q
1
x (p
2
/p
1
)
Example: If a valve is rated for 50 LPM @ 1000 PSI,
the flow at 2000 PSI =
Q
2
= 50 lpm x (2000/1000) = 71 LPM
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Valve Pressure Drop Selection
Since proportional valves often not linearized, a graph is generated
for flow vs. spool-stroke. This also eliminates the need to calculate
flows at various pressure drops. Instead, many data sheets will give a
family of flows for various pressure drops:
p
v
= 20 bar (290 PSI)
30 bar (435 PSI)
50 bar (725 PSI)
100 bar (1,450 PSI)
Example: 4 WRZ 16 E 150 valve
(80)
(320)
(460)
5
4
3
2
1
(400)
(240)
(160)
100 80 70 60 50 40 30 20 15 90
21.1
84.5
121.5
0
105.7
63.4
42.3
PA / B T
or
PB / A T
Command value in %
Q
NOM
150 L/min nominal flow with a 10 bar valve pressure differential
1 p = 10 bar constant
2 p = 20 bar constant
3 p = 30 bar constant
4 p = 50 bar constant
5 p = 100 bar constant
p = Valve pressure differential to DIN 24 311 (input pressure p
P
minus load pressure p
L
minus return line pressure p
T
)
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Sizing Proportional Valves for Acceleration and Deceleration
For transfer systems, the highest pressures are normally experienced
during acceleration of the mass.
The natural frequency of a hydraulic system normally determines the
minimal allowable acceleration and deceleration.
t
min
(sec) = (3 x 6)/
o
f
o
=
o
/ (2 x )
t
min
= minimum time of acceleration (sec)
o
= natural frequency, undamped (radians/sec)
= (C/M)
C = spring constant
M = mass (NOT POUNDS)
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Simulation Software
Above, we used an ideal 1:1 double-rod cylinder in order to simplify
calculations and estimate natural frequency and an ideal annulus area:
Simulation software such as HYVOS allows extremely accurate
simulation of the performance of hydraulic systems without the above
simplification. But this software can be difficult to access.
A simple spreadsheet, though, can quickly calculate many of the most
important values necessary for design. Simplifications such as above
then become generally unnecessary.
A
A
=
f
o
2
2
S M
E
C
1
= C
2
=
E A
2
V
o f
o
=
2 E A
A
S/2 M
2
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Poor Mans Simulation Software
26,947 Cmin=
1293.2 1034.6 775.9 dPt=
681.0 544.8 408.6 dP2 = 35.54 d-crit (in)=
612.2 489.8 367.3 dP1 =
700.00 F (friction) (lb)= 37.68 V-pipe 2 (ci)=
387.8 510.2 632.7 P2 (PSI)= 610.06 F (accel) = 14.72 V-pipe 1 (ci)=
681.0 544.8 408.6 P3 (psi)= 48.00 L-pipe 2 (in)=
Decel. Const. Vel. Accel. 0.15 t(min. accel.) (sec)= 1.00 d-pipe 2 (in)=
48.00 L-pipe 1 (in)=
1000.0 P-system (psi)= 0.02 t (time cont)(sec)= 0.63 d-pipe 1 (in)=
42.00 stroke (in)=
700.0 F-friction (lb) = 40.65 w(damp)(rad/sec)=
610.1 F-acceler (lb)= 121.96 w(theor)(rad/sec)= 1.66 A2 (si)=
1.38 d-rod2 (in)=
336.8 A-max (in/ss)= 26,947 Ct (lb/in)= 2.00 d-bore2 (in)=
49.7 V-max (in/sec)=
1.00 C (friction)= 3.14 A1 (si)=
0.6 t (stroke) (sec)= 1.81 Mass (lb*ss/in)= 0.00 d-rod1 (in)=
40.5 Qmax= 20.0 Stroke (in)= 700.00 Weight (lb) = 2.00 d-bore1 (in)=
Valve Pressure Drops Required 200000
Bulk Mod
(lb/in)=
Natural Frequency, 2:1 Cylinder, 1=a side, 2=b side, 2:1 Valve
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Proportional Acceleration Systems
Remember:
Total pressure drop can be greater than system pressure,
especially if the valve ratio does not match the cylinder ratio
A negative pressure in one or the other side of the cylinder means
that cavitation will occur. Again, this normally occurs if the ratios
do not match.
Infinite acceleration is not possible, so actual velocity and flow will
be greater than average velocity and flow. Size valve accordingly.
Reducing volume between the valve and cylinder will increase
spring-constant C, and allow for faster acceleration.
Larger bore cylinders also increase spring-constant C.
If natural frequency is too low, theres always state control. But
figure this out before start up!
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Oversizing and Undersizing of Valves
Design Example:
Two engineers select the valve and the pump (system) pressure setting
for the same application.
Engineer #1: calculates P
L
= 66 bar for load pressure
Engineer #2: calculates same as above
Engineer #1 sets the pump pressure to 100 bar.
Therefore the valve pressure drop is P
v
= 33 bar.
A valve is selected from the catalog that passes the
required flow at a pressure drop of 33 bar, when the
valve is fully opened.
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Valve Selection Example
Engineer #2 selects a valve which has a flow rate
twice that of Engineer #1s choice (for example, 200 liter
spool instead of 100 liter spool). It will have the same
flow with 1/4 of the pressure drop across the valve.
Engineer #2 sets his pump pressure to P
p
= 74 bar.
The valve pressure drop is only 8 bar rather than 33 bar!
(see graph)
Design Note:
Engineer #2 will have a more efficient system, suitable for
non-dynamic systems. If dynamic acceleration and
decelerations are required, a higher pressure drop will
result in better control. The electrical command to the
valve will be more accurately followed when a higher
pressure drop is used.
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Pressure Drop Relationships
p
L
= 66 bar (
2
/
3
)
p
v
= 33 bar (
1
/
3
)
p
P
= 100 bar (
3
/
3
)
p
L
= 66 bar (
11
/
12
)
p
v
= 8.5 bar (
1
/
12
)
p
P
= 74.5 bar (
12
/
12
)
200%
50
2
/
3
100%
11
/12
8%
92%
50
2
/3 100%
0
50
100
2
/3
33%
66%
Engineer #1
Engineer #2
p
p
Q, v
p
L
P
F
Q, v
p
L
P
F
P = F v
P = p
L
Q
Q,
V,
p
L
,
p,
P
Q = Flow
F = Force
v = Velocity
P = Power
p
L
= Load pressure
p = Valve drop
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Effect of Valve Response
In open loop applications, a main valve selection criteria is that the
valve responds accurately to the command signal. Valve shift times in
the data sheet should be compared to the required response times.
Example: 4 WRZ 16 . . .
In most open loop systems, the dynamic properties of the system
dictates the overall system performance.
The effects of valve hysteresis and threshold become more critical
when Closing the Loop.
100
75
50
25
0
150 120 90 60 30 0
0 100
0 75
0 50
0 25
150 120 90 60 30 0
Time in ms Time in ms
Signal change in %
Transient function with a stepped form of electrical input signal
Model 4WRZ...
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Closing the Loop
An undesirable characteristic of most hydraulic systems is that the
relationship between the command signal and the output of a hydraulic
drive is not a linear (proportional) function.
- Valve response to a stepped electrical signal is:
(A servo valve would respond similarly but up to 10 times faster)
0 40 80 120 160 200 0 40 80 120 160
0-25
10
20
30
40
50
60
70
80
90
100 0-100
0-75
0-50
Time in ms
Signal change in % Si ze 6
Transfer function: Stepped electrical input signal
Proportional valve
type: 4WRA6...
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Cylinder Response
Cylinder response to a stepped input (flow Q) is:
Two characteristics are observed:
1) A cylinder with an attached mass responds as a
spring - mass system
2) An integration occurs between the input and output.
This results in a phase-lag of -90
(X)
v i X
Servo
Valve
Cylinder
Q
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Example of Phase-Lag
If the cylinder stroke versus the valve command signal
(valve spool stroke) is plotted, the phase-lag can be seen:
In this example, the valve and cylinder are in open loop.
Note: As the valve is operated at increasing frequencies, the phase-
lag increases due to inertia and spring compliance Important: If -180
total phase-lag occurs in the system, the output will be inverted as
compared to the command signal!
0
90
180
270
360
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Closing the Loop Mechanically
When a feedback (lever mechanism in this example) is added, the
system responds in a proportional manner rather than as an integrator.
Response to a step is similar to the response of a valve spool,
proportional with some time lag (known as PT
1
).
Feedback Command
F
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Gain of the Closed Loop
If the pivot on the feedback lever is moved to the left, the amount of valve
spool opening is increased for the same position error. The system
corrects for errors faster, and the positional accuracy improves. If we
move the pivot more and more to the left (more gain), the system
response will exhibit increasing overshoot, and eventually become
unstable.
Example:
X X X
t t t
Low Gain High Gain Too High Gain
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Closing the Loop Electrically
This example is essentially the same as the mechanical feedback
example shown before.
The ultimate system performance (response time and accuracy) is
determined by the properties of all components in the system.
S
U
Feedback Command
F
Controller
Amplifier
Control Valve
Transducer
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Properties of the System Components
1. Cylinder
An ideal cylinder would have zero breakaway friction and no internal
leakage. In actuality, cylinder friction results in positioning errors
(cylinders exhibit stick-slip friction at low speed). Additionally internal
cylinder leakage will result in a compensating flow (spool shift) in the
valve.
These limitations cause position errors.
2. Feedback Transducer
An ideal transducer would measure infinitesimal position errors for the
controller to correct. An actual transducer has limited resolution, which
results in a position measurement error. The response time of some
transducers can also cause signal delays, which can limit system
response.
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Properties of System Components
3. Valve
An ideal valve would have zero response time and react to any
input signal. Real valves have step response times as seen, and
require some minimum signal to respond, known as threshold.
Additionally, a true zero-overlap spool, as shown in the examples, is
only possible with poppet type valves. Since spool valves are
normally used, a zero-overlap spool has null flow leakage in the
center position.
A hydraulic designer must therefore select the best available
components, within his budget, to achieve the highest static accuracy
possible.
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Component selection for Overall System Performance
Ultimately the system performance is determined by the quality of all of
the components used.
What system improvements and tricks can be
used to get the most out of a system?
What can be done to optimize the system:
The goal is to use the highest gain possible
to achieve the highest accuracy, and the
fastest response time.
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Cylinder Selection Guidelines
1. Select a cylinder with:
- Lowest friction seal material (PTFE composite, step seals, metal
rings, etc); or for highest performance applications, a servo cylinder
with hydrostatic bearings.
- A cylinder size selected for high natural frequency, as well as for
force and buckling. Except for the piping length between the
cylinder and valve (best design is the valve mounted directly on the
cylinder), the piston area is the only variable for increasing the
natural frequency!
C =
E A
2
V
o
f
o
=
2
C
M
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Valve Selection Guidelines
2. Select a valve with:
- Minimum threshold and hysteresis (highest
performance valves use electrical spool feedback)
- A pressure drop as high as possible under nominal
load conditions (at least 30% of the supply pressure)
- Utilizing as much spool stroke as possible, with some
reserve margin
- Spool center position zero-lapped for position and under-lapped
for pressure control
- Overlapped proportional valves may only be used with
appropriate control compensation features. (DMX, HNC)
- Overshoot-free step response
- Dynamic response determined by the application
(highest available response is not always the best choice)
- Special spool, if required
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Example of a Special Spool
for Plastic Injection Axes
Velocity and Pressure Control
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Transducer and Controller
Selection Guidelines
3. Select a transducer with:
- Resolution five to ten times better than the
required accuracy
- Good linearity
- Minimal time lag (high dynamic response)
4. Select a controller with:
- Highest possible resolution
- Fastest scan time, if digital
- Control algorithms optimized for hydraulic drives:
direction-dependent gain, switched integrator for
positioning, spool linearization and overlap
compensation, following error compensation,
P-I-DT
1
controller, etc
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Performance and Stability
5. Improve the System Damping
Stability criteria defines the maximum system gain (goal for
performance) as:
Kv
max
< 2 D 2 f
o
Kv
max
= Gain [ ]
D = Damping Ratio
f
o
= Natural frequency
What are some ways to increase the system gain ?
Increase the Damping Ratio D by using:
1. Passive damping
2. Active damping
m/s
m
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Increasing Damping
If velocity feedback is added to the position control, the closed loop frequency
response can be increased. However, this results in reduced damping. This
can cause reduced performance in some hydraulic closed loop systems.
If acceleration feedback is added, the system damping will be increased. Load
pressure feedback provides similar results when applied correctly. Using these
feedbacks to improve performance is known as active damping or state-
variable control.
m a = P A
a ~ P
The modulator shown earlier is an excellent example of improving damping by
using pressure feedback !
m = mass
a = acceleration
P = pressure
A = cylinder area
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Observer Control
In some systems, a so-called observer control is used. The dynamic response of the
system is stored in an electronic model of the system (analog or digital). From this
stored model, calculated values for velocity and/or acceleration (the state variables)
are derived without using actual transducers.
1) Closed loop with position feedback
X = Position
X = Velocity
X = Acceleration
X X Command
Controller Valve
Gain
f
o
D
Gain
f
o
D
F
Cylinder
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
2) Closed loop state variable control using position,
velocity and acceleration transducers
Damping with Transducers
X X
X
K
X
K
X
Command
Controller Valve
Gain
f
o
D
Gain
f
o
D
F
Cylinder
Acceleration
Velocity
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Damping with Observer Model Values
3) Closed loop using
calculated values for
velocity and acceleration
X X
X
M
X
M
X
M
X - X
M
K
X
K
X
Command
Controller Valve
Gain
f
o
D
Gain
f
o
D
F
Cylinder
Acceleration
Velocity
Observer
Model
Model
Corrector
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Using Integrators
In theory, using an integrator in the controller would result in perfect accuracy
(any deviation from the commanded position would result in an increasing
opening of the valve spool). However, due to friction and threshold errors, a
continuous integration limit cycle oscillation can occur.
An integrator also results in an additional -90 of phase lag. This can
cause a hydraulic positioning axis to becoming a high power phase
shift oscillator
In practical use, an integrator is enabled only below a preset minimum velocity,
and when within a position error "window" (switched integrator).
Along with electronic spool overlap compensation, high accuracy
results can be achieved using simple, low cost proportional valves, in
closed loop.
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Supply Pressure Considerations
1. Supply Pressure
The system pressure should be constant. When high flow is required (high
system dynamics), a drop in supply pressure can occur due to acceleration of
the oil mass in the lines, and due to the response time of the pumps pressure
control.
Recommendation: An accumulator should be used in the pressure
supply, mounted near the control valve.
If the system has a long return line, similar problems may occur.
Acceleration of the return oil mass can cause return pressure spikes, which
reduces the available working pressure. This will reduce the system
performance.
Recommendation: Use return line accumulators near the control
valve, as needed.
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Supply Pressure Optimization
Using accumulators
to improve dynamic
response.
Note: The mass of the oil in the return line can have a very significant
effect !
P T
P
S
M
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Valve Dynamic Selection
There are three general configurations of valve-cylinder dynamics:
Case 1: The valve is high response and
the cylinder is low response (f
o
)
Case 2: The valve and the cylinder are
similar in response
Case 3: The valve is low response and
the cylinder is high response (f
o
)
f
o
cyl
= natural frequency of the cylinder
f
o
v
= natural frequency of the valve
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Relationship of Valve and
Cylinder Dynamics
Case 1: 0.3 - Best results are achieved with pressure
or acceleration feedback
Case 2: 1 - A simple PT
1
controller offers best results
Case 3: 3 - A PD controller will provide best results
f
o
cyl
f
o
v
f
o
cyl
f
o
v
f
o
cyl
f
o
v
State-variable
Controller
PT
1
Controller
P Controller
PDT
1
Controller
0.3 0.6 1.0 1.7 3.0 0.3
Case 2
Case 3 Case 1
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Effect of Controller Parameters
The following graphs show step response for all three cases.
The parameters are varied per:
1. Increase P Gain, left to right
2. Increase, bottom to top :
Case 1: Acceleration feedback
Case 2: Lag time T1
Case 3: Derivative gain
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Increased P-Gain
I
n
c
r
e
a
s
e
d
A
c
c
e
l
e
r
a
t
i
o
n
F
e
e
d
b
a
c
k
Effect of Parameters Case 1
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Effect of Parameters Case 2
Increased P-Gain
I
n
c
r
e
a
s
e
d
L
a
g
T
i
m
e
T
1
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Effect of Parameters Case 3
Increased P-Gain
I
n
c
r
e
a
s
e
d
D
e
r
i
v
a
t
i
v
e
G
a
i
n
D
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Performance Optimized with Parameters
In the examples shown, it can be seen that a higher gain can be
achieved when other compensating parameters are used. By using
higher gain, increased accuracy and improved response is achieved,
and stability is maintained.
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Other Considerations on System Dynamics
Note:
Case 1: Fast valve - slow cylinder, is an example of a classic
servo system, using a servo valve. Optimally, a double-rod, equal area
cylinder should be used.
Case 3: Slow valve - fast cylinder, is a typical application using low
cost proportional valves, operating in closed loop. The control
performance is not perfect, but can usually meet the design
requirements. Due to the proportional valves spool overlap and non-
linear flow characteristics, as well as the fact that differential cylinders
are most often used, the controller must compensate for these
properties. Controllers such as the HACD and HNC-100 utilize these
compensations.
Proportional valves can provide a low cost solution with good accuracy,
long life, and simple maintenance.
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Closed Loop Application Using a
Proportional Valve and a Differential Cylinder
(20)
(40)
(60)
(80) 5
4
3
2
1
100 80 70 60 50 40 30 20 10 90
5.3
10.6
15.9
21.1
Command value in %
PA / B T
or
PB / A T
1 p = 10 bar constant
2 p = 20 bar constant
3 p = 30 bar constant
4 p = 50 bar constant
5 p = 100 bar constant
Encoder Feedback
Cylinder
Proportional
Valve Amplifier CNC
Feedback
Command
Incremental Signal
Drive Gain Electrohydraulic Gain CNC Gain
m/min
v
m
s in mm
D/A Control
Q
A
L/min
U
CNC
10V
Control Output
stage
s
Q
U
CNC
s
+Q in L/min + U
CNC
in V + s in mm
v
i
n
m
/
m
i
n
v
i
n
m
/
m
i
n
Q
i
n
L
/
m
i
n
Q
i
n
L
/
m
i
n
U
C
N
C
i
n
V
U
C
N
C
i
n
V
K
v
K
v
K
v
v Q
U
CNC
U
K
v
= in
v
Q
m/min
L/min
K
v
= in
Q
U
CNC
L/min
V
K
v
= in
U
CNC
s
V
mm
Loop Gain
K
v
= K
v CNC
K
v El-Hy
K
v Drive
K
v FB
in
m
min mm
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Electronic Compensation of Non-linear
Flow Characteristics and Valve Spool Overlap
Standard Linearization Compensation Linearization and Overlap
Output signal
Resulting
signal
Controller
signal
Positive
overlap
Positive
overlap
Positive
overlap
Output signal Output signal
V
a
l
v
e
A
m
p
l
i
f
i
e
r
I
+U
I
-U
I
+U
I
-U
I
+U
I
-U
+U -U +U -U +U -U
+Q +Q +Q
-Q -Q -Q
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Overall System Characteristics
The following pages show examples of system response, in open and
closed loop. System response is shown with step and ramp
command inputs, step input opposing force, and the effects of various
controller elements.
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Elements of an Open Loop System
X = Position
X = Velocity
X = Acceleration
Cylinder
P
A
P
B
P
S
P
T
Spool Opening
Valve Driver
Command
Generator
I
V
Valve
State Variables
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Open Loop Response to a Step Input
Cylinder
P
A
P
B
Valve Driver
I
V
Spool Opening
X
X
X
Valve
P
S
P
T
Command
Generator
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Open Loop Response to a Force Step
Cylinder
P
A
P
B
Valve
P
S
P
T
Valve Driver
I
V
Spool Opening
X
X
F
Command
Generator
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Elements of a Closed Loop System
P
T
P
S
Valve
Cylinder
Valve Driver
I
V
Controller
Spool Opening
X
Command
Generator
Transduce
r Interface
Transduce
r
P
A
P
B
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Closed Loop Response to a Step Input
P
T
P
S
Valve
Cylinder
Valve Driver
I
V
Controlle
r
Spool Opening
X
X
Transducer
Transducer
Interface
Command
Generator
P
A
P
B
Valve
Signal
Command
Feedback
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Effect of P Gain on Position Control
Cylinder
Transducer
Transducer
Interface
Controller
Valve Driver
Valve
P
A
P
B
Spool Opening
P
T
P
S
Time
Time
P
o
s
i
t
i
o
n
V
e
l
o
c
i
t
y
Gain
I
V
Command
Gain 3
Gain 2
Gain 1
Gain 1 > Gain 2 > Gain
3
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Command
Feedback
Closed Loop Response to a Ramp Input
P
T
P
S
Valve
Cylinder
Valve
Driver
I
V
Controller
Spool Opening
X
X
P
A P
B
Transducer
Interface
Command
Generator
Transducer
Valve
Signal
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Dynamics and Errors in Closed Loop
Time
P
o
s
i
t
i
o
n
P
o
s
i
t
i
o
n
Command
Feedback
Position Error
Following
Error
Phase Lag
Amplitude Loss
Response to a
Ramped
Position
Command
Response to a
Sinusoidal
Command
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Closed Loop Response to a Force Step
P
T
P
S
Valve
Cylinder
Valve Driver
I
V
Controller
Spool Opening
X X
P
A
P
B
Transducer
Interface
Command
Generator
Transducer
F
Command
Feedback
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Position Control - Correction for Opposing
Force using PI Control
P
o
s
i
t
i
o
n
P
o
s
i
t
i
o
n
Time
Time
Command
Feedback
Command
Feedback
Force
Force
Position Error
Command
Command
Feedback
Feedback
P Control
PI Control
P Gain
P Gain + I Rate
Out
Out
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Input
Time
Time
Time
Time
Time
Output
P Term
I
Term
D Term
Response of a PID Controller to a Step Input
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Response of a PID Controller to a Ramp
Input
Input
Time
Time
Time
Time
Time
Output
P Term
I
Term
D Term
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Position Control - Improving Dynamics using
PD Control
Command
Feedback
P Control
Command
Feedback
PD Control
Gain 2
Gain 1
Gain 1 > Gain 2
Gain 2
Gain 1
Gain 1 > Gain 2
P
o
s
i
t
i
o
n
P
o
s
i
t
i
o
n
Time
Time
Out
Out
P Gain
P Gain + D Lead Time
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Position Control - Improving Dynamics using PT
1
Control
Out
Out
Command
Feedback
P Control
Command
Feedback
PT
1
Control
P
o
s
i
t
i
o
n
P
o
s
i
t
i
o
n
Time
Time
P Gain
P Gain + Lag Time
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
BoschRexroth Proportional Valves
Which Proportional Valve should
I use?
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Start
Start
here
here
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Low Flow (Direct Operated)
Open Loop (No Cylinder Feedback)
4WRAB Flows to 25 Lpm,
minimum cost, limited performance
(similar to KDG4V-3 S)
4WRA Greater flow range to 60 Lpm,
better performance, more features
(Ramp)
4WRAB6
4WRAE10
4WRAE6
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Low Flow (Direct Operated); Open Loop with Better
Performance (No Cylinder Feedback)
4WRE(E)
Designed for good
performance without high cost
Very repeatable
Greater flow capacity
High value
4WRP(E)
Proportional with LVDT
5 bar/ land or 10 bar delta-p,
E and W spools in housing (no
sleeve)
Overlap compensation
High reliability
Most robust OBE available
CE approved
4WREE10
4WRPE10 E
Proportional
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
High Flow (Pilot Operated)
Open Loop (No Cylinder Feedback)
4WRZ Wide flow range, Cost effective,
Accurate enough for most open loop needs
4WRL (HPP) with overlap E and W spools,
OBE has overlap comp., High dynamics, Most
robust OBE, CE approved
4WRLE
(HPP)
High
Performance
Proportional
4WRZE
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Low Flow (Direct Operated)
Closed Loop (Cylinder or system Feedback)
4WRP H - Servo Solenoid Best
Choice, Excellent dynamics for
closed loop, Failsafe defined,
Outperforms many old servos, Very
Robust OBE, High reliability, Wide
range of nominal flow 2 to 100 Lpm
at 70 bar (Higher delta-P for
Spool/sleeve valve)
4WRE Wider flow range, spool in
housing (normally V), proportional
flow rating, lower cost, Performance
not as high
4WRPEH 10
4WREE10
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
High Flow (Pilot Operated)
Closed Loop - System Feedback
4WRLE Servo Solenoid with V-spool,
High Flow range, Main spool in housing,
Flow rated at 10 bar delta-p,
Very Robust OBE
4WRVE (HRV 2-Stage) Higher
dynamics, 10 bar drop, Very Robust
OBE, 12-pin Connector
4WRLE
(Servo Solenoid
2 stage)
4WRVE
(HRV - 2 stage)
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
Injection Valves are Preferred
4WRLE..Q4 Best choice for
Injection valve for Plastic Injection
Molding Machines
Can replace Q2-spool
High reliability
Better Performance
Same advantages of Servo
Solenoid valves
4WRLE..Q4.-3X/
Alle Rechte bei Bosch Rexroth AG, auch fr den Fall von Schutzrechtsanmeldungen. Jede Verfgungsbefugnis, wie Kopier- und Weitergaberecht, bei uns.
pQ Valves are Preferred
For Closed Loop Pressure and Throttle Function
5WRPE (pQ Valve) Can combine
double port throttle and 3-way
for close loop pressure control,
Requires transducer and PID card,
140 Lpm at 11 bar
Note: Use P1+B to P2+A to balance
flow forces, pmax is 210 bar
0 811 402 107
Das könnte Ihnen auch gefallen
- 009 A10VO-31-Load-Sensing-003 - 94964796Dokument3 Seiten009 A10VO-31-Load-Sensing-003 - 94964796deliaabregu100% (1)
- E in FührungDokument29 SeitenE in FührungLuisFranciscoMarinMedrano71% (7)
- Implementierung einer Methode zur automatischen 3D-FEM Modellerstellung und Festigkeitsrechnung für Vollhartmetall-Spiralbohrer: Unter Verwendung von nicht kommerzieller Matlab-SoftwareVon EverandImplementierung einer Methode zur automatischen 3D-FEM Modellerstellung und Festigkeitsrechnung für Vollhartmetall-Spiralbohrer: Unter Verwendung von nicht kommerzieller Matlab-SoftwareBewertung: 5 von 5 Sternen5/5 (1)
- A4vg Rde92003 34 EzdDokument1 SeiteA4vg Rde92003 34 EzdSasko DimitrovNoch keine Bewertungen
- A11vo Rde92500 13 LRDSDokument1 SeiteA11vo Rde92500 13 LRDSSasko DimitrovNoch keine Bewertungen
- A4vg 40 56 Dad PDFDokument1 SeiteA4vg 40 56 Dad PDFSasko Dimitrov100% (1)
- A6vm Rde91604 37 Ha2tDokument1 SeiteA6vm Rde91604 37 Ha2tSasko DimitrovNoch keine Bewertungen
- Mobile Transmission RDE97910 01 A4DAD A6DA5Dokument1 SeiteMobile Transmission RDE97910 01 A4DAD A6DA5Sasko DimitrovNoch keine Bewertungen
- A6vm Rde91604 35 Ep ADokument1 SeiteA6vm Rde91604 35 Ep ASasko DimitrovNoch keine Bewertungen
- A11vo Rde92500 14 LG2SDokument1 SeiteA11vo Rde92500 14 LG2SSasko DimitrovNoch keine Bewertungen
- Części XPMDokument13 SeitenCzęści XPMArturNoch keine Bewertungen
- Bomba Hidraulica A11VGDokument30 SeitenBomba Hidraulica A11VGBruno SilvaNoch keine Bewertungen
- Didactic Teachware 4.0 - REXROTHDokument44 SeitenDidactic Teachware 4.0 - REXROTHespnsc100% (1)
- KS 260032Dokument42 SeitenKS 260032Freddo rzNoch keine Bewertungen
- Rde92088-01 Dfe1Dokument1 SeiteRde92088-01 Dfe1LuisFranciscoMarinMedrano100% (1)
- A10VSO - Qmax and QminDokument2 SeitenA10VSO - Qmax and QminbrunosamaeianNoch keine Bewertungen
- A6vm Rde91604 37 Ha2tDokument1 SeiteA6vm Rde91604 37 Ha2tSasko DimitrovNoch keine Bewertungen
- Rde91604-34 Ep+svDokument1 SeiteRde91604-34 Ep+svLuisFranciscoMarinMedrano100% (1)
- Dca de en Es 000009 Inkl ErrataDokument38 SeitenDca de en Es 000009 Inkl ErrataJesus N RodriguezNoch keine Bewertungen
- Rde 90304-04-SDokument4 SeitenRde 90304-04-SMahmmod Al-Qawasmeh100% (1)
- BS80.6.1049 E-PlanDokument41 SeitenBS80.6.1049 E-PlanNguyen Ngoc100% (2)
- A4vso LR2GN PDFDokument1 SeiteA4vso LR2GN PDFHaytham ElbazNoch keine Bewertungen
- A6vm-Ha1r SVDokument1 SeiteA6vm-Ha1r SVEng-Mohammed SalemNoch keine Bewertungen
- A6vm Rde91604 34 Ep SVDokument1 SeiteA6vm Rde91604 34 Ep SVSasko DimitrovNoch keine Bewertungen
- Rde92060-02 DFRDokument1 SeiteRde92060-02 DFRLuisFranciscoMarinMedranoNoch keine Bewertungen
- Hawe Katalog GermanDokument299 SeitenHawe Katalog Germanrokot1Noch keine Bewertungen
- A4vso HD1TDokument1 SeiteA4vso HD1TEng-Mohammed SalemNoch keine Bewertungen
- A A10vo45dflr 31R-PSC12K01 - So256 R910933920 de Zeichn R910934477Dokument24 SeitenA A10vo45dflr 31R-PSC12K01 - So256 R910933920 de Zeichn R910934477ЮрийNoch keine Bewertungen
- Lehrtafeln ProgrammDokument30 SeitenLehrtafeln Programmbee1406760% (1)
- Mobile Transmission RDE97910 07 A4DAD A6DADokument1 SeiteMobile Transmission RDE97910 07 A4DAD A6DASasko DimitrovNoch keine Bewertungen
- Rde94000 MaDokument1 SeiteRde94000 MaLuisFranciscoMarinMedrano100% (1)
- A8vo SRCDokument1 SeiteA8vo SRCthierrylindoNoch keine Bewertungen
- Rde92500-35 Le2sDokument1 SeiteRde92500-35 Le2sLuisFranciscoMarinMedranoNoch keine Bewertungen
- Manual de Reparo A4VG - R1 PDFDokument40 SeitenManual de Reparo A4VG - R1 PDFjavierNoch keine Bewertungen
- 8 3 3 Swing DWD Controller PDFDokument16 Seiten8 3 3 Swing DWD Controller PDFImam JavaNoch keine Bewertungen
- Rde97910 01 - A4dad A6da5Dokument1 SeiteRde97910 01 - A4dad A6da5LuisFranciscoMarinMedranoNoch keine Bewertungen
- Rde97910 09 - A10epd A2Dokument1 SeiteRde97910 09 - A10epd A2LuisFranciscoMarinMedranoNoch keine Bewertungen
- A2vk Rde94000 MaDokument1 SeiteA2vk Rde94000 MaSasko DimitrovNoch keine Bewertungen
- Bomba Schuing de HormigoDokument68 SeitenBomba Schuing de Hormigodaniel madruga100% (1)
- rd92500-01-b - 2010-04 Rex RothDokument52 Seitenrd92500-01-b - 2010-04 Rex RoththierrylindoNoch keine Bewertungen
- Mannesmann Rexroth A10VSO Series Repair InstructionsDokument24 SeitenMannesmann Rexroth A10VSO Series Repair InstructionsJosé PérezNoch keine Bewertungen
- RDE 91 001 TC Hydr Motor Repair Instructions PDFDokument28 SeitenRDE 91 001 TC Hydr Motor Repair Instructions PDFeng13Noch keine Bewertungen
- Test Instruction - A8VO PDFDokument14 SeitenTest Instruction - A8VO PDFjose manuel barroso pantoja100% (1)
- Rde 94000-01Dokument9 SeitenRde 94000-01Ahmed Moustafa100% (1)
- Rde97910 07 - A4dad A6daDokument1 SeiteRde97910 07 - A4dad A6daLuisFranciscoMarinMedranoNoch keine Bewertungen
- Mobile Transmission RDE97910 04 A4DAD MCRDokument1 SeiteMobile Transmission RDE97910 04 A4DAD MCRSasko DimitrovNoch keine Bewertungen
- A2VKDokument24 SeitenA2VKStar SealNoch keine Bewertungen
- 825.0.1559 Hydraulic DiagramDokument5 Seiten825.0.1559 Hydraulic DiagramEdmar CostaNoch keine Bewertungen
- A8vo La1kh1 2Dokument1 SeiteA8vo La1kh1 2Eng-Mohammed SalemNoch keine Bewertungen
- A6vm-Hd SVDokument1 SeiteA6vm-Hd SVyipiyemaNoch keine Bewertungen
- 310.0.119 Hydraulic Diagram PDFDokument3 Seiten310.0.119 Hydraulic Diagram PDFMohamed HarbNoch keine Bewertungen
- Rde92711-01 DRDokument1 SeiteRde92711-01 DRLuisFranciscoMarinMedranoNoch keine Bewertungen
- Rde97910 04 - A4dad MCRDokument1 SeiteRde97910 04 - A4dad MCRLuisFranciscoMarinMedrano100% (1)
- Hydraulik Katalog - 2012 09 PDFDokument348 SeitenHydraulik Katalog - 2012 09 PDFRolando Nuñez del PradoNoch keine Bewertungen
- Circuitos Industriales Solucion PDFDokument12 SeitenCircuitos Industriales Solucion PDFAdrian VargasNoch keine Bewertungen
- Diesel Injection SystemDokument29 SeitenDiesel Injection SystemTapas BanerjeeNoch keine Bewertungen
- Simbolos Hidraulicos-Din-Iso 1219 PDFDokument15 SeitenSimbolos Hidraulicos-Din-Iso 1219 PDFGomez BeltránNoch keine Bewertungen
- Manual de Reparo A4VG - R1Dokument40 SeitenManual de Reparo A4VG - R1bblener609100% (8)
- Bosch EingangssignaleDokument78 SeitenBosch Eingangssignaleagung setiawanNoch keine Bewertungen
- FR RadDokument85 SeitenFR RadHải Nguyễn NhưNoch keine Bewertungen