Das könnte Ihnen auch gefallen
- Exam 3Dokument18 SeitenExam 3skxnxNoch keine Bewertungen
- Klausur: Digitaltechnik I (TI2B) Vom 06. Februar 2004Dokument4 SeitenKlausur: Digitaltechnik I (TI2B) Vom 06. Februar 2004salNoch keine Bewertungen
- Blatt08 PGDokument14 SeitenBlatt08 PGJosh PetersonNoch keine Bewertungen
- Uebungsblatt Grundlagen Der Betriebswirtschaftslehre 1Dokument4 SeitenUebungsblatt Grundlagen Der Betriebswirtschaftslehre 1cabrelnguessongNoch keine Bewertungen
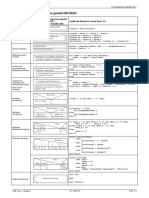
- Struktogrammsinnbilder DIN66261Dokument1 SeiteStruktogrammsinnbilder DIN66261Robert SchweikleNoch keine Bewertungen
- MfP3 Uebungen09jjjDokument7 SeitenMfP3 Uebungen09jjjShiny ShihNoch keine Bewertungen
- Informatik_240315_220147Dokument16 SeitenInformatik_240315_220147Karam KNoch keine Bewertungen
- DS Klausur 1617Dokument20 SeitenDS Klausur 1617Chenyu ZhangNoch keine Bewertungen
- AB1 EsopDokument3 SeitenAB1 EsopSamira MajserNoch keine Bewertungen
- U9 PDFDokument9 SeitenU9 PDFHong Chul NamNoch keine Bewertungen
- Grundlegende SchaltungenDokument23 SeitenGrundlegende Schaltungengoodsweater100% (1)
- Aufgabe 2Dokument3 SeitenAufgabe 2Deutsch Sài GònNoch keine Bewertungen
- Blatt02 ws1920 AngabeDokument7 SeitenBlatt02 ws1920 AngabeallaNoch keine Bewertungen
- C-Kurs Klausur MuLoeDokument18 SeitenC-Kurs Klausur MuLoeK.A ZribiNoch keine Bewertungen
- SDRT I Klausur F14 - MusterlösungDokument16 SeitenSDRT I Klausur F14 - MusterlösungdjhousecatNoch keine Bewertungen
- Uebungsblatt 07 Schleifen - ArraysDokument2 SeitenUebungsblatt 07 Schleifen - ArraysHamdi KhalilNoch keine Bewertungen
- Technische InformatikDokument6 SeitenTechnische InformatikMithil Krishna Ramesh KumarNoch keine Bewertungen
- SoSe12Dokument7 SeitenSoSe12Patson TazoNoch keine Bewertungen
- MMDR 2 UeDokument136 SeitenMMDR 2 UemightidesNoch keine Bewertungen
- IngMat Alte Klasur UBT 2019Dokument3 SeitenIngMat Alte Klasur UBT 2019Arya AydınNoch keine Bewertungen
- SoSe16Dokument5 SeitenSoSe16Patson TazoNoch keine Bewertungen
- Eth Exam5Dokument13 SeitenEth Exam5Natan costaNoch keine Bewertungen
- Kostenfunktionen PDFDokument9 SeitenKostenfunktionen PDFstopnaggingmeNoch keine Bewertungen
- Loesung 2Dokument12 SeitenLoesung 2Simeon ValchevNoch keine Bewertungen
- E D Informatica 2022 SP SN C Var 01 LGEDokument2 SeitenE D Informatica 2022 SP SN C Var 01 LGEIrina BarboiuNoch keine Bewertungen
- 2113.Casio87DE Plus - SummenDokument1 Seite2113.Casio87DE Plus - SummenReideenNoch keine Bewertungen
- FP Physik 12 13 FHDokument7 SeitenFP Physik 12 13 FHDanang KusnadiNoch keine Bewertungen
- DS Klausur 1718Dokument16 SeitenDS Klausur 1718Chenyu ZhangNoch keine Bewertungen
- Gnuplot and CDokument135 SeitenGnuplot and CDr. Varga IstvanNoch keine Bewertungen
- Modulprüfung Baustatik I Am 15. Juli 2014Dokument10 SeitenModulprüfung Baustatik I Am 15. Juli 2014Carolina GeoNoch keine Bewertungen
- Prog1 Tut Exercise 2Dokument4 SeitenProg1 Tut Exercise 2NainibrokNoch keine Bewertungen
- Prog1 Tut Exercise 4Dokument3 SeitenProg1 Tut Exercise 4NainibrokNoch keine Bewertungen
- KE07 IngInf Zeiger2 V3.0.1Dokument17 SeitenKE07 IngInf Zeiger2 V3.0.1MoezBenReNoch keine Bewertungen
- Blatt 03Dokument1 SeiteBlatt 03Filbert Felix SutantoNoch keine Bewertungen
- Matlab Warmup 2Dokument20 SeitenMatlab Warmup 2Зоран АлексићNoch keine Bewertungen
- Die Python Einführung 3Dokument51 SeitenDie Python Einführung 3Hans UeliNoch keine Bewertungen
- d001 Siebensegmentanzeige v02Dokument9 Seitend001 Siebensegmentanzeige v02mail87523Noch keine Bewertungen
- Excel PlantafelDokument4 SeitenExcel PlantafelchrmerzNoch keine Bewertungen
- Zusammenfassung Regelungstechnik KomplettDokument34 SeitenZusammenfassung Regelungstechnik KomplettDombo komboNoch keine Bewertungen
- BS - Probeklausurlösung - 2018Dokument44 SeitenBS - Probeklausurlösung - 2018danik2002zNoch keine Bewertungen
- Newton Verfahren AufgabeDokument3 SeitenNewton Verfahren AufgabeMoed AlanNoch keine Bewertungen
- Pruefung WS 09 10Dokument7 SeitenPruefung WS 09 10Pinaki SankarNoch keine Bewertungen
- Ping Pong OpenglDokument3 SeitenPing Pong OpenglCande Alberto Rios D VilladaNoch keine Bewertungen
- kl-d1s21 LoesDokument6 Seitenkl-d1s21 LoesmaxNoch keine Bewertungen
- Loes Klausur ws04 ADokument9 SeitenLoes Klausur ws04 AUniversität BielefeldNoch keine Bewertungen
- Das Digitale BetragsoptimumDokument13 SeitenDas Digitale BetragsoptimumBurak GNoch keine Bewertungen
- Loesung 2223Dokument19 SeitenLoesung 2223K.A ZribiNoch keine Bewertungen
- Eth Exame2Dokument48 SeitenEth Exame2Natan costaNoch keine Bewertungen
- Uebung InvrechnungDokument6 SeitenUebung Invrechnungevekleine20Noch keine Bewertungen
- Dokloe 2 GDokument28 SeitenDokloe 2 GMrTabacoNoch keine Bewertungen
- Codigo DinoDokument5 SeitenCodigo DinoAndreu Mayol NovellaNoch keine Bewertungen
- Blatt 03Dokument3 SeitenBlatt 03Emir DrustinacNoch keine Bewertungen
- Lösungen zum großen Python-Workbook: Ausführliche MusterlösungenVon EverandLösungen zum großen Python-Workbook: Ausführliche MusterlösungenNoch keine Bewertungen
- U8 PDFDokument5 SeitenU8 PDFHong Chul NamNoch keine Bewertungen
- Blatt 03Dokument4 SeitenBlatt 03zuhkorNoch keine Bewertungen
- CPP ZusammenfassungDokument7 SeitenCPP Zusammenfassungtasnimlouati03122002Noch keine Bewertungen
- Skript Waack MergedDokument263 SeitenSkript Waack MergedMoe IbrahimNoch keine Bewertungen
- Tareas PDFDokument10 SeitenTareas PDFchichoperu2010Noch keine Bewertungen
- Numerische Berechnung Von Uneigentlichen Integralen - Gauß-Laguerre-Quadratur PDFDokument9 SeitenNumerische Berechnung Von Uneigentlichen Integralen - Gauß-Laguerre-Quadratur PDFalexandermueller123Noch keine Bewertungen
- Einstieg ins Machine Learning: Grundlagen, Prinzipien, erste SchritteVon EverandEinstieg ins Machine Learning: Grundlagen, Prinzipien, erste SchritteNoch keine Bewertungen