Das könnte Ihnen auch gefallen
- A2 B1. Das Original. Mit 3 Übungstests. Prüfungstraining. Deutsch-Test Für ZuwandererDokument10 SeitenA2 B1. Das Original. Mit 3 Übungstests. Prüfungstraining. Deutsch-Test Für Zuwandererttt27% (11)
- Fragenkatalog Mit AntwortenDokument8 SeitenFragenkatalog Mit AntwortenAnonymous LblPe92BvM100% (1)
- SPS AWL TutorialDokument45 SeitenSPS AWL Tutorialandreas76889Noch keine Bewertungen
- Hyster PC Service Tool Installations - Und Benutzerleitfaden PDFDokument91 SeitenHyster PC Service Tool Installations - Und Benutzerleitfaden PDFPra Zuar Silk Screen ConfecçãoNoch keine Bewertungen
- BIGTREETECH SKR 2 Bedienungsanleitung DeutschDokument14 SeitenBIGTREETECH SKR 2 Bedienungsanleitung DeutschRene Sec100% (1)
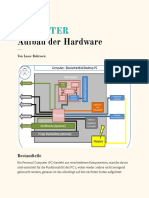
- Aufbau Eines ComputersDokument3 SeitenAufbau Eines ComputersLasse RohrssenNoch keine Bewertungen
- Quast PDFDokument21 SeitenQuast PDFDehumanizerFromHell100% (1)
- Zusammenfassung MicrocontrollerDokument8 SeitenZusammenfassung MicrocontrollerSamuelGordenNoch keine Bewertungen
- Les Sram Et Sdram Et PLDDokument54 SeitenLes Sram Et Sdram Et PLDDer BraNoch keine Bewertungen
- Aufbau Eines ComputersDokument3 SeitenAufbau Eines Computersdani6886Noch keine Bewertungen
- LBT1 - KA Nr.1 VorbereitungDokument8 SeitenLBT1 - KA Nr.1 VorbereitungrebiimolahaNoch keine Bewertungen
- 12 HalbleiterspeicherDokument6 Seiten12 Halbleiterspeicherapi-3734081Noch keine Bewertungen
- ArbeitsspeicherDokument18 SeitenArbeitsspeicherDex EbertNoch keine Bewertungen
- Mainboard ProjektarbeitDokument8 SeitenMainboard ProjektarbeitDejan SimicNoch keine Bewertungen
- OAK Arsitektur ParalelDokument105 SeitenOAK Arsitektur ParalelnofiarozaNoch keine Bewertungen
- 020 Rechnersysteme I OnlineDokument58 Seiten020 Rechnersysteme I Onlinehiwi.vusalNoch keine Bewertungen
- RA - InstructionsDokument16 SeitenRA - InstructionsRozhanNoch keine Bewertungen
- Mces Ia 1 SchemeDokument13 SeitenMces Ia 1 Scheme4al21cs097Noch keine Bewertungen
- Mikrocontroller Und AssemblerDokument11 SeitenMikrocontroller Und AssemblerchekorteNoch keine Bewertungen
- LoesDokument66 SeitenLoeshassanaagibNoch keine Bewertungen
- Was Ist Eine CPU?Dokument5 SeitenWas Ist Eine CPU?lissycatcatNoch keine Bewertungen
- Pro Zes SorenDokument7 SeitenPro Zes Sorenmach dochNoch keine Bewertungen
- Eetop - CN UVM REG WorkshopDokument111 SeitenEetop - CN UVM REG WorkshopSam HoneyNoch keine Bewertungen
- PC GrundkomponentenDokument9 SeitenPC GrundkomponentenJoão VictorNoch keine Bewertungen
- Handbuch PIC24/dsPIC-Mikrocontroller: Praxisbeispiele zur Anwendung der Module und BefehleVon EverandHandbuch PIC24/dsPIC-Mikrocontroller: Praxisbeispiele zur Anwendung der Module und BefehleNoch keine Bewertungen
- Experiment BoardDokument10 SeitenExperiment Boardm_scribd_2010Noch keine Bewertungen
- Assembler ArduinoDokument6 SeitenAssembler ArduinoChrisNoch keine Bewertungen
- Anwenderhandbuch MODBUSDokument32 SeitenAnwenderhandbuch MODBUSkader boudiNoch keine Bewertungen
- Sehs3317 L2Dokument63 SeitenSehs3317 L2李里奧Noch keine Bewertungen
- AVR Tutorial G.C.C. de Jhon Edward VasquezDokument136 SeitenAVR Tutorial G.C.C. de Jhon Edward Vasquezjhonedward100% (2)
- Bauinfo Klausur Lernzettel PDFDokument25 SeitenBauinfo Klausur Lernzettel PDFFelix H.Noch keine Bewertungen
- Captură de Ecran Din 2023-06-02 La 12.29.38Dokument2 SeitenCaptură de Ecran Din 2023-06-02 La 12.29.38mimi.moldovan0111Noch keine Bewertungen
- RechnerarchitekturDokument50 SeitenRechnerarchitekturJMjm07Noch keine Bewertungen
- 10 AufbauComputersysteme 06Dokument2 Seiten10 AufbauComputersysteme 06magic virginNoch keine Bewertungen
- 1 Aus 4 DecoderDokument6 Seiten1 Aus 4 DecoderMia MaiglöckchenNoch keine Bewertungen
- Grundwissen SPS-Technik: 1.1 HistorieDokument21 SeitenGrundwissen SPS-Technik: 1.1 Historie1hdfgh1Noch keine Bewertungen
- Hardware Guide 2022V02Dokument10 SeitenHardware Guide 2022V02Anna GrasseckerNoch keine Bewertungen
- Leitfaden SpeicherDokument76 SeitenLeitfaden SpeicherluepiNoch keine Bewertungen
- Informatik 2Dokument24 SeitenInformatik 2Hanan FikriNoch keine Bewertungen
- Wuolah Free SI02TaskDokument4 SeitenWuolah Free SI02TaskScribdTranslationsNoch keine Bewertungen
- AVR-GCC-Tutorial - WWW Mikrocontroller NetDokument119 SeitenAVR-GCC-Tutorial - WWW Mikrocontroller Netr_wuseni4752Noch keine Bewertungen
- Aufgabe 2: Betriebssystempraktikum Im Wintersemester 2023/2024Dokument5 SeitenAufgabe 2: Betriebssystempraktikum Im Wintersemester 2023/2024warrobots0609Noch keine Bewertungen
- ADR SkriptaDokument11 SeitenADR SkriptaEmil KaracicNoch keine Bewertungen
- p1982 PDFDokument2 Seitenp1982 PDFGopinath BalamuruganNoch keine Bewertungen
- Hacken Mit LinuxDokument17 SeitenHacken Mit LinuxNils PasemannNoch keine Bewertungen
- Abkuerzungen Zum Thema SPSDokument6 SeitenAbkuerzungen Zum Thema SPSLukas KeNoch keine Bewertungen
- BASCOM Tutorial 1Dokument22 SeitenBASCOM Tutorial 1Podina SoniaNoch keine Bewertungen
- ComputertechnikDokument266 SeitenComputertechniksupergustavNoch keine Bewertungen
- B 2600Dokument3 SeitenB 2600nincsnickNoch keine Bewertungen
- D1 Mini Module DEDokument32 SeitenD1 Mini Module DEDiderNoch keine Bewertungen
- BS PrüfungDokument17 SeitenBS PrüfunglissycatcatNoch keine Bewertungen
- AVR-GCC-Tutorial - WWW Mikrocontroller NetDokument88 SeitenAVR-GCC-Tutorial - WWW Mikrocontroller NetThomas SalzerNoch keine Bewertungen
- 023 Rechnersysteme IIDokument34 Seiten023 Rechnersysteme IIhiwi.vusalNoch keine Bewertungen
- Rechnersysteme Tu Darmstadt k3Dokument103 SeitenRechnersysteme Tu Darmstadt k3Daniel OrtizNoch keine Bewertungen
- Pruefungsprotokoll 1802Dokument3 SeitenPruefungsprotokoll 1802KarlFranz77Noch keine Bewertungen
- Referat - Mainboards PDFDokument7 SeitenReferat - Mainboards PDFcrackymouse100% (1)
- AVR AlemaoDokument369 SeitenAVR AlemaoMarco AntonioNoch keine Bewertungen
- Computer ArchitekturDokument14 SeitenComputer Architekturbardiataghikhani036Noch keine Bewertungen
- BauformenDokument8 SeitenBauformeneugen.scutariuNoch keine Bewertungen
- New Atmmk MikroprozessorenDokument45 SeitenNew Atmmk MikroprozessorenMrTabacoNoch keine Bewertungen
- Arduino: Mikrocontroller-Programmierung mit Arduino/FreeduinoVon EverandArduino: Mikrocontroller-Programmierung mit Arduino/FreeduinoNoch keine Bewertungen
- SMath EinführungDokument335 SeitenSMath EinführungDany PQNoch keine Bewertungen
- Batch Befehl eDokument6 SeitenBatch Befehl eXaverprenzelNoch keine Bewertungen
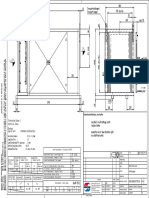
- 3.4. Dane Techniczne Skraplacza Chłodzonego Powietrzem GUNTNER GVV 065.1ADokument1 Seite3.4. Dane Techniczne Skraplacza Chłodzonego Powietrzem GUNTNER GVV 065.1AJacek B.Noch keine Bewertungen
- BARdolinoDokument4 SeitenBARdolinoStilux VoltNoch keine Bewertungen