0% fanden dieses Dokument nützlich (0 Abstimmungen)
64 Ansichten1 SeiteRegelunstechnik-Blatt7 SR1
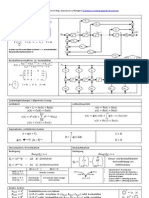
Das Dokument ist ein Übungsblatt zur Vorlesung Systemtheorie und Regelungstechnik I, das Aufgaben zur Berechnung der Impulsantworten und Sprungantworten linearer Systeme enthält. Es umfasst analytische Berechnungen, die Untersuchung der BIBO-Stabilität von Systemen und die grafische Darstellung von Impuls- und Sprungantworten. Die Aufgaben erfordern Kenntnisse in der Zustandsraumdarstellung und der Analyse dynamischer Systeme.
Hochgeladen von
PiedmondCopyright
© © All Rights Reserved
Wir nehmen die Rechte an Inhalten ernst. Wenn Sie vermuten, dass dies Ihr Inhalt ist, beanspruchen Sie ihn hier.
Verfügbare Formate
Als PDF, TXT herunterladen oder online auf Scribd lesen
0% fanden dieses Dokument nützlich (0 Abstimmungen)
64 Ansichten1 SeiteRegelunstechnik-Blatt7 SR1
Das Dokument ist ein Übungsblatt zur Vorlesung Systemtheorie und Regelungstechnik I, das Aufgaben zur Berechnung der Impulsantworten und Sprungantworten linearer Systeme enthält. Es umfasst analytische Berechnungen, die Untersuchung der BIBO-Stabilität von Systemen und die grafische Darstellung von Impuls- und Sprungantworten. Die Aufgaben erfordern Kenntnisse in der Zustandsraumdarstellung und der Analyse dynamischer Systeme.
Hochgeladen von
PiedmondCopyright
© © All Rights Reserved
Wir nehmen die Rechte an Inhalten ernst. Wenn Sie vermuten, dass dies Ihr Inhalt ist, beanspruchen Sie ihn hier.
Verfügbare Formate
Als PDF, TXT herunterladen oder online auf Scribd lesen