Beruflich Dokumente
Kultur Dokumente
03 Vektoren Und Bewegung in 2 Dimensionen
Hochgeladen von
Ana PavlovicCopyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
03 Vektoren Und Bewegung in 2 Dimensionen
Hochgeladen von
Ana PavlovicCopyright:
Verfügbare Formate
03 Vektoren und Bewegung in 2 Dimension
Nach dem Absprung des
Leoparden ist seine Flugbahn
durch seine Startgeschwindigkeit
und seinen Absprungwinkel
bestimmt. Wie können wir
herausfinden, wo der Leopard
landen wird?
Blick nach Vorne ►►
Ziel: Mehr über Vektoren lernen und Vektoren als Werkzeug zur Analyse von 2-D-Bewegung verwenden
Vektoren und Komponenten Schiefer Wurf Kreisbewegung
Der dunkelgrüne Vektor ist die Die parabelförmige Bahn eines Die Fahrgäste bewegen sich mit
Anfangsgeschwindigkeit des Balls. Die springenden Fischs ist ein Beispiel eines konstantem Tempo, aber sie sind
hellgrünen Komponentenvektoren schiefen Wurfs. Die Details sind für beschleunigt, weil ihre Richtung dauernd
zeigen die anfängliche horizontale und den Fisch und den Korbball gleich. ändert.
vertikale Geschwindigkeit.
Sie werden lernen, die Komponenten Sie werden sehen, wie schiefe-Wurf- Sie werden lernen, den Betrag und die
eines Vektors zu finden und wie sie zu Aufgaben gelöst werden, indem die Richtung der Beschleunigung eines
benutzen, um Aufgaben zu lösen. Zeitdauer eines Objekts in der Luft und Objekts in Kreisbewegung zu bestimmen.
die Wurfweite bestimmt werden.
Blick zurück ◄◄
Freier Fall
________________________________________________
In Abschnitt 2.7 lernten Sie, dass sich ein Halt-Moment-Mal 3.1 Ein
nach oben geworfenes Objekt im freien Fall Spieler kickt einen Fussball gerade in
befindet. Die Beschleunigung ist dieselbe, die Luft hinauf. Der Ball braucht 2.0 s,
gleich, ob sich nach oben steigt oder nach um den höchsten Punkt zu erreichen.
unten zurückkommt. Wie schnell war er Ball ungefähr, als
Bei einem schief geworfenen Objekt ist die der den Fuss des Spielers verliess?
vertikale Bewegung ebenfalls ein freier Fall. A. 5 m/s
Sie werden Ihr Wissen zum freien Fall B. 10 m/s
benutzen, um Aufgaben zum schiefen Wurf C. 15 m/s
zu lösen. D. 20 m/s
──────────────────────────────────
03 Vektoren und Bewegung in 2 Dimensionen 1 / 28 22.10.2022
3.1 Verwendung von Vektoren
In Kapitel 2 lösten wir Probleme, bei denen sich Objekte entlang einer
geradlinigen Bahn bewegten. In diesem Kapitel bewegen sich Objekte
auf gekrümmten Bahnen. Es handelt sich also um Bewegung in zwei
Dimensionen. Da die Richtung der Bewegung so wichtig sein wird,
müssen wir eine entsprechende mathematische Sprache entwickeln, um
dies zu beschreiben: die Sprache der Vektoren.
Im Abschnitt 1.5 führten wir das Konzept «Vektor» ein. In den paar
folgenden Abschnitten werden wir Methoden zum Arbeiten mit
Vektoren, dem Werkzeug zur Untersuchung von zweidimensionalen
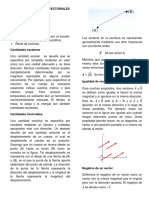
Bewegungen, entwickeln. Ein Vektor ist eine Grösse mit sowohl, einem
Betrag und einer Richtung. Figur 3.1 zeigt, wie die Geschwindigkeit eines
Partikels mit einem Vektor 𝑣⃗ dargestellt wird. Das Tempo des Teilchens
an dieser Position ist 5 m/s und es bewegt sich in der vom Pfeil
angezeigten Richtung. Der Betrag eines Vektors wird durch den
Buchstaben ohne Pfeil dargestellt. In diesem Falle hier beträgt das Tempo des Teilchens 𝑣 = 5𝑚/𝑠, was der Betrag
des Geschwindigkeitsvektors 𝑣⃗ ist. Der Betrag eines Vektors, eine skalare Grösse, kann nie eine negative Zahl sein.
Beachte ► Auch wenn der Vektorpfeil über die Seite hinweg gezeichnet ist, von seinem Fusspunkt bis
zu seiner Spitze, heisst das nicht, dass er sich auch über diese Distanz «erstreckt». Der Pfeil gibt uns den Wert für
die Vektorgrösse nur gerade für den einen Punkt an, wo der Fusspunkt des Pfeils platziert ist. ◄
In Kapitel 1 haben wir gesehen, dass der Verschiebevektor eines
Objekts ein Vektor ist, der von der Anfangsposition bis zur Endposition
des Objekts eine gewisse Zeit später gezeichnet wird. Da Verschiebung
ein der Vorstellung einfach zugängliches Konzept ist, werden wir es dazu
benutzen, um damit einige der Eigenschaften von Vektoren einzuführen.
Es ist aber zu beachten, dass alle Eigenschaften, die wir in diesem
Kapitel behandeln werden (Addition, Subtraktion, Multiplikation,
Komponenten) für alle Typen von Vektoren gelten, nicht nur für
die Verschiebung!
Nehmen wir an, dass Sam, unser alter Freund aus Kapitel 1, bei
seiner Haustür startet, über die Strasse läuft, und 200 m nordöstlich von
seinem Ausgangspunkt endet. Sam’s Verschiebung, die wir mit 𝑑⃗𝑠
bezeichnen, ist in Figur 3.2a dargestellt. Der Verschiebevektor ist eine
geradlinige Verbindung von seiner Startposition zu seiner Endposition,
und entspricht nicht notwendigerweise seinem wirklichen Weg. Die
gestrichelte Linie bezeichnet einen Weg, den Sam allenfalls genommen
haben könnte, aber sein Verschiebevektor ist der Vektor 𝑑⃗𝑠 .
Um einen Vektor zu beschreiben, müssen wir sowohl seinen Betrag
als auch seine Richtung angeben. Sam’s Verschiebung können wir
schreiben als
𝑑⃗𝑆 = (200𝑚, 𝑛𝑜𝑟𝑑𝑜𝑠𝑡)
wobei die erste Zahl den Betrag und das zweite Element die Richtung
angibt. Der Betrag von Sam’s Verschiebung ist 𝑑𝑠 = 200𝑚, die Distanz
zwischen seinem Anfangs- und Endpunkt.
Sam’s Nachbarin Becky spaziert ebenfalls von ihrer eigenen Haustür aus 200m nach Nordosten. Becky’s
Verschiebung 𝑑⃗𝐵 = (200𝑚, 𝑛𝑜𝑟𝑑𝑜𝑠𝑡) hat denselben Betrag und dieselbe Richtung wie Sam’s Verschiebung 𝑑⃗𝑆 . Da
Vektoren durch ihren Betrag und ihre Richtung definiert werden, sind zwei Vektoren gleich, wenn sie denselben
Betrag und dieselbe Richtung haben. Das gilt unabhängig von den aktuellen Startpunkten eines Vektors. Somit
sind die zwei Verschiebungen in Figur 3.2 gleich, und wir können 𝑑⃗𝐵 = 𝑑⃗𝑆 schreiben.
03 Vektoren und Bewegung in 2 Dimensionen 2 / 28 22. Okt. 2022
Vektoraddition
Wie wir in Kapitel 1 gesehen haben, können wir aufeinanderfolgende
Verschiebungen durch Addition von Vektoren kombinieren. Dieses Konzept
wollen wir nochmals ansehen und erweitern. Figur 3.3 zeigt die Verschiebung
einer Hikerin, die im Punkt P startet und im Punkt S endet. Sie wandert
zuerst 4 km nach Osten, und dann 3 km nach Norden. Der erste Abschnitt
der Wanderung wird durch den Verschiebevektor 𝐴⃗ = (4𝑘𝑚, 𝑂𝑠𝑡)
beschrieben. Der zweite Abschnitt der Wanderung entspricht dem
Verschiebevektor 𝐵⃗⃗ = (3𝑘𝑚, 𝑁𝑜𝑟𝑑). Gemäss Definition ist auch eine
Verschiebung von ihrer Start- zu ihrer Endposition ein Vektor. Das ist in der
Figur der Vektor 𝐶⃗. 𝐶⃗ ist die resultierende Verschiebung, denn sie beschreibt
das Resultat, wenn die Wanderin zuerst Verschiebung 𝐴⃗ und dann
Verschiebung 𝐵⃗⃗ ausführt.
Der Ausdruck «resultierend» beinhaltet Addition. Die resultierende
Verschiebung 𝐶⃗ ist eine erste Verschiebung 𝐴⃗ plus eine zweite Verschiebung
⃗⃗, oder
𝐵
𝐶⃗ = 𝐴⃗ + 𝐵
⃗⃗ (3.1)
Die Summe zweier Vektoren wird resultierender Vektor genannt. Die Vektoraddition ist kommutativ: 𝐴⃗ + 𝐵⃗⃗ = 𝐵⃗⃗ +
𝐴⃗. Vektoren können in beliebiger Reihenfolge addiert werden.
Schauen Sie nochmals in Taktik-Box 1.4 nach, wie in drei Schritten zwei Vektoren addiert werden. Diese «Fuss
an Spitze»-Methode, um den Vektor 𝐶⃗ = 𝐴⃗ + 𝐵⃗⃗ in Figur 3.3 zu finden, wird graphische Addition genannt.
Wenn zwei Vektoren addiert werden sollen, ist es oft zweckmässig, sie mit gemeinsamem Fusspunkt zu zeichnen,
so wie in Figur 3.4a gezeigt. Um 𝐷 ⃗⃗ + 𝐸⃗⃗ zu ermitteln, kann Vektor 𝐸⃗⃗ so parallel verschoben werden, dass sein Fuss
auf die Spitze des Vektors 𝐷⃗⃗ zu liegen kommt und dann wird die Fuss-an-Spitze-Methode der graphischen Addition
angewandt. Das ergibt den Vektor 𝐹⃗ = 𝐷 ⃗⃗ + 𝐸⃗⃗ in Figur 3.4b. Alternativ zeigt Figur 3.4c, dass die Vektorsumme 𝐷
⃗⃗ +
⃗⃗ ⃗⃗ ⃗⃗
𝐸 sich auch als die Diagonale des durch 𝐷 und 𝐸 definierten Parallelogramms ergibt. Diese Methode wird die
Parallelogramm-Regel der Vektoraddition genannt.
Skalarmultiplikation
Die Hikerin in Figur 3.3 startete mit einer Verschiebung 𝐴⃗1 = (4𝑘𝑚, 𝑂𝑠𝑡). Angenommen, ein zweiter Hiker wandert
zweimal so schnell nach Osten. Mit Bestimmtheit wird die Verschiebung des zweiten Hikers 𝐴⃗2 = (8𝑘𝑚, 𝑂𝑠𝑡) sein.
Der Ausdruck «zweimal» bezeichnet eine Multiplikation, womit wir sagen können
𝐴⃗2 = 2𝐴⃗1
Die Multiplikation eines Vektors mit einer positiven skalaren Grösse ergibt einen Vektor, der einen
anderen Betrag hat, aber in dieselbe Richtung zeigt.
Der Vektor 𝐴⃗ sei bestimmt durch Betrag A und Richtung 𝜃𝐴 , das heisst 𝐴⃗ = (𝐴, 𝜃𝐴 ).
Jetzt sei 𝐵⃗⃗ = 𝑐𝐴⃗, wobei c eine positive Zahl sei. Dann ist
⃗⃗ = 𝑐𝐴⃗
𝐵 gleichbedeutend mit (𝐵, 𝜃𝐵 ) = (𝑐𝐴, 𝜃𝐴 ) (3.2)
Der Vektor wird um den Faktor gestreckt oder gestaucht (dh. Vektor 𝐵⃗⃗ hat den Betrag 𝐵 = 𝑐𝐴), aber 𝐵⃗⃗ zeigt in
dieselbe Richtung wie 𝐴⃗. Dies ist in Figur 3.5 illustriert.
03 Vektoren und Bewegung in 2 Dimensionen 3 / 28 22. Okt. 2022
Angenommen, wir multiplizieren 𝐴⃗ mit 0. Mit Gleichung 3.2 erhalten wir
0 ∗ 𝐴⃗ = 0
⃗⃗ = (0𝑚, 𝑅𝑖𝑐ℎ𝑡𝑢𝑛𝑔 𝑢𝑛𝑑𝑒𝑓𝑖𝑛𝑖𝑒𝑟𝑡) (3.3)
Das Produkt ist ein Vektor der Länge 0. Dieser Vektor wird Nullvektor
genannt und geschrieben als 0⃗⃗ . Die Richtung des Nullvektors hat keine
Bedeutung, denn einem Pfeil der Länge 0 kann keine Richtung zugeordnet
werden.
Was ist, wenn wir einen Vektor mit einer negativen Zahl multiplizieren?
Gleichung 3.2 kann nicht angewendet werden mit c < 0, denn Vektor 𝐵⃗⃗
kann nicht einen negativen Betrag haben. Betrachten wir den Vektor −𝐴⃗,
was gleichbedeutend ist mit einer Multiplikation von 𝐴⃗ mit -1. Wegen
𝐴⃗ + (−𝐴⃗) = ⃗0⃗ (3.4)
muss der Vektor −𝐴⃗ derart sein, dass er zu 𝐴⃗ addiert als resultierenden
Vektor den Nullvektor ⃗⃗ 0 ergibt. Oder in anderen Worten: Die Spitze des
Vektors −𝐴⃗ muss zum Fuss des Vektors 𝐴⃗ zurückkehren, wie in Figur 3.6
gezeigt ist. Das ist nur möglich, wenn der Vektor −𝐴⃗ denselben Betrag wie
der Vektor 𝐴⃗ hat, aber in die entgegengesetzte Richtung zeigt. Somit können
wir schliessen, dass gilt
−𝐴⃗ = (𝐴, 𝑅𝑖𝑐ℎ𝑡𝑢𝑛𝑔 𝑒𝑛𝑡𝑔𝑒𝑔𝑒𝑛𝑔𝑒𝑠𝑒𝑡𝑧𝑡 𝑧𝑢 𝐴⃗) (3.5)
Einen Vektor mit -1 multiplizieren heisst, seine Richtung umkehren, ohne
seine Länge zu ändern.
Als Beispiel zeigt Figur 3.7 die Vektoren 𝐴⃗, 2𝐴⃗ und −3𝐴⃗. Multiplikation
mit 2 verdoppelt die Länge des Vektors, ändert aber seine Richtung nicht.
Multiplikation mit -3 streckt die Länge um einen Faktor 3 und kehrt die
Richtung um.
Vektorsubtraktion
Wie könnten wir einen Vektor 𝐵⃗⃗ von einem Vektor 𝐴⃗ subtrahieren, um den Vektor 𝐴⃗ − 𝐵⃗⃗ zu erhalten? Bei Zahlen gilt,
dass die Subtraktion dasselbe ist wie die Addition einer negativen Zahl. Das heisst, 5-3 ist dasselbe wie 5 + (-3). In
gleicher Weise gilt 𝐴⃗ − 𝐵⃗⃗ = 𝐴⃗ + (−𝐵⃗⃗). Wir können die Regeln für Vektoraddition und die Tatsache, dass −𝐵⃗⃗ ein zu
⃗⃗ entgegengesetzter Vektor ist, dazu benutzen, um eine Regel zur Vektorsubtraktion aufzustellen.
𝐵
Taktik-Box 3.1 Subtraktion von Vektoren
Um den Vektor 𝐵⃗⃗ vom Vektor 𝐴⃗ zu subtrahieren:
Zeichne den Vektor 𝐴⃗.
Setze −𝐵⃗⃗ mit dem Fusspunkt an die Spitze von 𝐴⃗
Zeichne einen Pfeil vom Fusspunkt von 𝐴⃗ zur Spitze
von −𝐵⃗⃗. Das ist der Vektor 𝐴⃗ − 𝐵⃗⃗
03 Vektoren und Bewegung in 2 Dimensionen 4 / 28 22. Okt. 2022
_________________________________________________________________________________________
Halt-Moment-Mal 3.1
Welche Figur zeigt 2𝑃⃗⃗ − 𝑄⃗⃗ ?
───────────────────────────────────────────────────────────────
3.2 Verwendung von Vektoren in Bewegungsdiagrammen
In Kapitel 2 haben wir Geschwindigkeit bei einer eindimensionalen Bewegung definiert als die Verschiebung, dh. die
Änderung der Position eines Objekts dividiert durch das Zeitintervall, innerhalb dem die Änderung stattgefunden
hat:
Δ𝑥 𝑥𝑓 − 𝑥𝑖
𝑣𝑥 = =
Δt Δt
In zwei Dimensionen ist die Verschiebung eines Objekts ein Vektor. Angenommen, das Objekt erfährt innerhalb des
Zeitintervalls Δt die Verschiebung 𝑑⃗. Den Geschwindigkeitsvektor eines Objekts wollen wir definieren als
𝑑⃗ 𝑑
𝑣⃗ = = ( , 𝑔𝑙𝑒𝑖𝑐ℎ𝑒 𝑅𝑖𝑐ℎ𝑡𝑢𝑛𝑔 𝑤𝑖𝑒 𝑑⃗) (3.6)
Δ𝑡 Δ𝑡
Definition von Geschwindigkeit in zwei oder mehr Dimensionen
Beachten Sie, dass wir einen Vektor mit einem Skalar multipliziert haben: Der Geschwindigkeitsvektor ist nichts
anderes als der Verschiebevektor multipliziert mit dem Skalar 1/Δt . Folglich zeigt der Geschwindigkeitsvektor in
die Richtung der Verschiebung. Daraus folgt, dass wir die Punkt-zu-Punkt-Verbindung in einem
Bewegungsdiagramm als Darstellung der Geschwindigkeit verwenden können.
Beachte ► Genau genommen ist die mit Gleichung 3.6 definierte Geschwindigkeit die mittlere
Geschwindigkeit während dem Zeitintervall Δ𝑡. Das genügt, um Bewegungsdiagramme zu verwenden, um
Bewegung bildhaft darzustellen. Wie bereits in Kapitel 2 gilt, dass wenn Δ𝑡 sehr klein gemacht wird, wir die
momentane Geschwindigkeit erhalten, mit der wir Berechnungen durchführen können. ◄
Beispiel 3.1 Bestimmung der Geschwindigkeit eines Flugzeugs
Ein Kleinflugzeug befindet sich 100 km östlich von Denver. Nach 1
Stunde Flug mit konstantem Tempo in der gleichen Richtung, befindet
es sich 200 km nördlich von Denver. Was ist die Geschwindigkeit des
Flugzeugs?
Vorbereiten Die Anfangs- und Endpositionen des Flugzeugs sind in
Figur 3.8 gezeigt. Der Verschiebevektor 𝑑⃗ ist der Vektor, der von der
Anfangsposition zur Endposition zeigt.
Lösen Die Länge des Verschiebevektors ist die Hypothenuse eines
rechtwinkligen Dreiecks:
𝑑 = √(100 km)2 + (200 km)2 = 224 km
Die Richtung des Verschiebevektors wird durch den Winkel 𝜃 in Figur 3.8 beschrieben. Gemäss der
Trigonometrie ist dieser Winkel
200 km
𝜃 = tan−1 ( ) = tan−1 (2.00) = 63.4°
100 km
Somit ist der Verschiebevektor des Flugzeugs
𝑑⃗ = (224 km, 63.4° 𝑛𝑎𝑐ℎ 𝑁𝑜𝑟𝑑𝑒𝑛 𝑣𝑜𝑛 𝑊𝑒𝑠𝑡𝑒𝑛 𝑎𝑢𝑠)
Da das Flugzeug diese Verschiebung innerhalb einer Stunde erfährt, beträgt seine Geschwindigkeit:
𝑑 224 km
𝑣⃗ = ( , 𝑔𝑙𝑒𝑖𝑐ℎ𝑒 𝑅𝑖𝑐ℎ𝑡𝑢𝑛𝑔 𝑤𝑖𝑒 𝑑⃗) = ( , 63.4° 𝑛𝑎𝑐ℎ 𝑁𝑜𝑟𝑑𝑒𝑛 𝑣𝑜𝑛 𝑊𝑒𝑠𝑡𝑒𝑛 𝑎𝑢𝑠)
Δ𝑡 1h
= (224 km⁄h , 63.4° 𝑛𝑎𝑐ℎ 𝑁𝑜𝑟𝑑𝑒𝑛 𝑣𝑜𝑛 𝑊𝑒𝑠𝑡𝑒𝑛 𝑎𝑢𝑠)
03 Vektoren und Bewegung in 2 Dimensionen 5 / 28 22. Okt. 2022
Bewerten Das Tempo des Flugzeugs ist der Betrag der Geschwindigkeit, 𝑣 = 224 km⁄h was eine vernünftige
Geschwindigkeit für ein Kleinflugzeug ist.
Wir definierten die Beschleunigung eines Objekts in einer Dimension als
𝑎𝑥 = Δ𝑣𝑥 /Δ𝑡. In zwei Dimensionen müssen wir einen Vektor benützen, um
Beschleunigung zu beschreiben. Die Definition von Beschleunigung als
Vektor ist eine direkte Erweiterung der eindimensionalen Version:
⃗⃗𝑓 −𝑣
𝑣 ⃗⃗𝑖 ⃗⃗
Δ𝑣
𝑎⃗ =
𝑡𝑓 −𝑡𝑖
=
Δ𝑡
(3.7)
Definition von Beschleunigung in zwei oder mehr Dimensionen
Eine Beschleunigung ist vorhanden, sobald sich die Geschwindigkeit
ändert. Da Geschwindigkeit ein Vektor ist, kann sie sich in einer oder beiden
der zwei möglichen Arten ändern:
1. Der Betrag kann sich ändern, was eine Änderung des Tempos anzeigt.
Vorpreschen oder abdrehen Das obere
Bild zeigt einen Barracuda, einen Fisch, 2. Die Richtung der Bewegung kann sich ändern.
der seine Beute durch eine schnelle In Kapitel 2 haben wir gesehen, wie ein Beschleunigungsvektor für den
lineare Beschleunigung, also eine ersten Fall berechnet wird, wo das Objekt schneller oder langsamer wird bei
schnelle Änderung des Tempos, fängt.
Die Körperform des Barracudas ist
einer geradlinigen Bewegung. In diesem Kapitel werden wir den zweiten Fall
optimiert für ein solches geradliniges untersuchen, bei dem ein Objekt die Richtung seiner Bewegung ändert.
Zustossen. Der Schmetterlingsfisch im Angenommen, ein Objekt hat eine Anfangsgeschwindigkeit 𝑣⃗𝑖 zum
unteren Bild hat eine ganz andere Zeitpunkt 𝑡𝑖 und später, zum Zeitpunkt 𝑡𝑓 sei die Geschwindigkeit 𝑣⃗𝑓 . Die
Erscheinungsform. Er kann sein Tempo Tatsache, dass die Geschwindigkeit sich ändert, sagt uns, dass das Objekt
nicht schnell ändern, aber seine innerhalb des Zeitintervalls Δ𝑡 = 𝑡𝑓 − 𝑡𝑖 eine Beschleunigung erfährt. Aus
Körperform ermöglicht es, schnell seine Gleichung 3.7 ist ersichtlich, dass die Beschleunigung in die gleiche Richtung
Richtung zu ändern. zeigt wie der Vektor Δ𝑣⃗. Dieser Vektor ist die Änderung der
Geschwindigkeit Δ𝑣⃗ = 𝑣⃗𝑓 − 𝑣⃗𝑖 , sodass wir, um herauszufinden, in welcher
Richtung der Beschleunigungsvektor zeigt, die Vektorsubtraktion 𝑣⃗𝑓 − 𝑣⃗𝑖 durchführen müssen. Taktik-Box 3.1
zeigte, wie eine Vektorsubtraktion durchgeführt wird. Taktik-Box 3.2 zeigt, wie Vektorsubtraktion anzuwenden ist,
um den Beschleunigungsvektor zu finden.
Taktik-Box 3.3 Bestimmung des Beschleunigungsvektors
Um die Beschleunigung zwischen der Geschwindigkeit
𝑣⃗𝑖 und 𝑣⃗𝑓 zu finden:
Zeichne den Geschwindigkeitsvektor 𝑣⃗𝑓 .
Zeichne −𝑣⃗𝑖 an der Spitze von 𝑣⃗𝑓 .
Zeichne Δ𝑣⃗ = 𝑣⃗𝑓 − 𝑣⃗𝑖 = 𝑣⃗𝑓 + (−𝑣⃗𝑖 )
Das ist die Richtung von 𝑎⃗
Kehre zum ursprünglichen Bewegungsdiagramm zurück.
Zeichne beim Punkt dazwischen einen Vektor in der Richtung
von Δ𝑣⃗; Beschrifte ihn mit 𝑎⃗. Das ist die
mittlere Beschleunigung im Punkt zwischen 𝑣⃗𝑖 und 𝑣⃗𝑓
03 Vektoren und Bewegung in 2 Dimensionen 6 / 28 22. Okt. 2022
Jetzt, wo wir wissen, wie Beschleunigungsvektoren zu bestimmen sind, können wir mit Punkten ein
vollständiges Bewegungsdiagramm erstellen, das die Position des Objekts, die mittleren Geschwindigkeiten,
bestimmt durch Verbinden der Punkte mit Pfeilen, und die Beschleunigungsvektoren gefunden durch Anwenden der
Taktikbox 3.2 zeigt. Beachte, es hat einen Beschleunigungsvektor, der zwei aufeinanderfolgende
Geschwindigkeitsvektoren miteinander verknüpft, und die Beschleunigung 𝑎⃗ wird beim Punkt zwischen den beiden
Geschwindigkeitsvektoren gezeichnet, die sie miteinander verknüpft.
Beispiel 3.2 Einzeichnen der Beschleunigung bei einer Marslandung
Eine Raumsonde bremst ab, während sie sicher auf die
Oberfläche des Mars absteigt. Zeichnen Sie ein
vollständiges Bewegungsdiagramm für die letzten paar
Sekunden der Landung.
Vorbereiten Figur 3.9 zeigt zwei Versionen eines
Bewegungsdiagramms: ein professionell gezeichnetes,
wie es üblicherweise in diesem Buch zu finden ist, und
eine einfachere Version, ähnlich zu was Sie im
Rahmen einer Hausaufgabe zeichnen würden.
Während die Raumsonde beim Abstieg langsamer
wird, rücken die Punkte näher zusammen und die
Geschwindigkeitsvektoren werden kürzer.
Lösen Der Detailausschnitt in Figur 3.9 zeigt, wie
Taktik-Box 3.2 angewendet wird, um die
Beschleunigung bei einem Punkt zu bestimmen. Alle
anderen Beschleunigungsvektoren werden ähnlich
sein, weil für jedes Paar von
Geschwindigkeitsvektoren gilt, dass der frühere länger
ist als der spätere.
Bewerten Während die Raumsonde abbremst, zeigen die Beschleunigungsvektoren und die
Geschwindigkeitsvektoren in entgegengesetzte Richtungen, in Übereinstimmung mit dem, was wir zu den
Vorzeichen der Beschleunigung in Kapitel 2 gelernt haben.
Vektoren und Kreisbewegung
Die 32 Kabinen des Riesenrads London Eye bewegen sich mit etwa 0.5 m/s auf einem vertikalen Kreis mit Radius
65m. Die Kabinen haben ein konstantes Tempo, aber sie bewegen sich nicht mit konstanter Geschwindigkeit.
Geschwindigkeit ist ein Vektor, der von beidem abhängt, sowohl vom Tempo wie auch von der Richtung. Und die
Richtung bei einer Kreisbewegung ändert sich konstant. Die Kabinen vollführen eine gleichförmige
Kreisbewegung: Sie bewegen sich mit konstantem Tempo, aber in einer kontinuierlich ändernden Richtung. In
diesem Abschnitt werden wir einige grundsätzliche Ideen zu kreisförmiger Bewegung einführen, um dann in Kapitel
6 wieder darauf zurückzukommen um es detaillierter zu behandeln.
Figur 3.10 ist ein Bewegungsdiagramm für eine gleichförmige Kreisbewegung, in diesem Fall für die Bewegung
eines Fahrgasts auf dem Riesenrad. Der Fahrgast bewegt sich mit einem konstanten Tempo, sweshalb wir gleiche
Distanzen zwischen aufeinanderfolgenden Punkten gezeichnet haben. Die Geschwindigkeitsvektoren werden
ermittelt, indem jeder Punkt mit dem nächsten verbunden wird. Sie sind gerade, nicht gekrümmte Linien. Alle
Geschwindigkeitsvektoren haben dieselbe Länge, aber jeder hat eine andere Richtung. Damit ist gesagt, dass es eine
Beschleunigung gibt, da die Geschwindigkeit sich ändert. Es ist nicht eine «Schnellerwerden» oder
«Langsamerwerden-Beschleunigung, sondern eine «Richtungsänderungsbeschleunigung». Wir können die Richtung
der Beschleunigung herleiten, indem wir den in Figur 3.10 dargestellten Schritte folgen. Zwischen den Punkten 1 und
2 ist die Änderung der Geschwindigkeit, und somit die Beschleunigung, zum Kreiszentrum hin gerichtet.
Unabhängig davon, welchen Punkt des Bewegungsdiagramms wir wählen, die Geschwindigkeiten ändern sich immer
so, dass der Beschleunigungsvektor gegen das Kreiszentrum hin zeigt.
03 Vektoren und Bewegung in 2 Dimensionen 7 / 28 22. Okt. 2022
__________________________________________________________________________________________
Halt-Moment-Mal 3.2 Die Figur zeigt, wie ein Auto um
eine Kurve fährt. Wenn Sie anwenden, was Sie in Figur 3.10
gelernt haben, was ist dann die Richtung der Beschleunigung des
Autos in dem Moment, in dem die Figur gezeigt ist?
A. Nordost B. Südost
C. Südwest D. Nordwest
───────────────────────────────────────────────────────────────
3.3 Koordinatensysteme und Vektorkomponenten
In den letzten zwei Abschnitten haben wir gesehen, wie Vektoren
graphisch addiert und subtrahiert werden. Aber Vektoren graphisch
aneinanderfügen ist nicht ein besonders guter Weg, um quantitative
Resultate zu erhalten. In diesem Abschnitt werden wir die
Beschreibung von Vektoren mit Koordinaten einführen, was die
Grundlage für das Rechnen mit Vektoren sein wird.
Koordinatensysteme
Wie wir in Kapitel 1 gesehen haben, kommt die Welt nicht mit einem
daran befestigten Koordinatensystem daher. Ein Koordinatensystem ist
ein künstlich eingeführtes Netz, das über ein Problem gelegt wird, um
quantitative Messungen zu machen. Die richtige Wahl eines
Koordinatensystems wird das Lösen eines Problems einfacher machen.
Wir werden im Allgemeinen Kartesische Koordinaten verwenden, das
vertraute rechtwinklige Netz mit senkrechten Achsen so wie in Figure
3.11 abgebildet.
Koordinatenachsen haben eine positive und eine negative Seite,
getrennt durch 0 im Ursprungspunkt, wo sich die beiden Achsen
kreuzen. Wenn Sie ein Koordinatensystem zeichnen, ist es wichtig, die
Achsen zu beschriften. Dies geschieht, indem auf der positiven Seite die
Achsenenden mit x und y beschriftet werden, so wie in Figure 3.11.
03 Vektoren und Bewegung in 2 Dimensionen 8 / 28 22. Okt. 2022
Komponentenvektoren
Figure 3.12 zeigt einen Vektor 𝐴⃗ und ein x-y-Koordinatensystem, das wir gewählt haben. Sobald die Richtungen der
Achsen bekannt sind, können wir zwei neue Vektoren parallel zu den Achsen definieren, die sogenannten
Komponentenvektoren von 𝐴⃗. Vektor 𝐴⃗𝑥 , der x-Komponentenvektor, ist die Projektion von 𝐴⃗ auf die x-Achse. Vektor
𝐴⃗𝑦 , der y-Komponentenvektor, ist die Projektion von 𝐴⃗ auf die y-Achse.
Mit Hilfe der Parallelogrammregel können Sie sehen, dass dass 𝐴⃗ die Vektorsumme der beiden
Komponentenvektoren ist:
𝐴⃗ = 𝐴⃗𝑥 + 𝐴⃗𝑦 (3.8)
Im Wesentlichen haben wir den Vektor 𝐴⃗ in zwei senkrecht
zueinanderstehende Vektoren «aufgebrochen», die parallel zu den
Achsen sind. Wir sagen, wir haben den Vektor 𝐴⃗ in seine
Komponentenvektoren zerlegt oder aufgespalten.
Beachte ► Der Fuss von 𝐴⃗ muss nicht notwendigerweise
im Ursprung ansetzen. Alles was wir wissen müssen, ist die
Orientierung des Koordinatensystems, damit wir 𝐴⃗𝑥 und 𝐴⃗𝑦 parallel
zu den Achsen zeichnen können. ◄
Komponenten
Unsere Konvention wird sein, der eindimensionalen kinematischen Variable 𝑣𝑥 ein positives Vorzeichen zu geben,
wenn der Geschwindigkeitsvektor 𝑣⃗ in Richtung der positiven Seite der x-Achse, und ein negatives Vorzeichen,
wenn 𝑣⃗ in Richtung der negativen Seite der x-Achse zeigt. Diese Regel gründet darauf, dass 𝑣𝑥 die x-Komponente von 𝑣⃗
ist. Diese Idee müssen wir auf Vektoren generell ausweiten.
Angenommen, wir haben einen Vektor 𝐴⃗, der in die beiden Komponentenvektoren 𝐴⃗𝑥 und 𝐴⃗𝑦 parallel zu den
Achsen zerlegt worden ist. Jeder Komponentenvektor kann mit einer einzelnen Zahl (einem Skalar), der
sogenannten Komponente, beschrieben werden. Die x-Komponente und y-Komponente des Vektors 𝐴⃗, bezeichnet als 𝐴𝑥
und 𝐴𝑦 , werden wie folgt bestimmt:
Taktik-Box 3.3 Bestimmung der Komponenten eines Vektors
Der Absolutwert |𝐴𝑥 | der x-Komponente 𝐴𝑥 ist der Betrag des Komponentenvektors 𝐴⃗𝑥 .
Das Vorzeichen von 𝐴𝑥 ist positiv, wenn 𝐴⃗𝑥 in die positive x-Richtung, und negativ, wenn 𝐴⃗𝑥 in die negative
x-Richtung zeigt.
Die y-Komponente 𝐴𝑥 wird in derselben Weise bestimmt.
03 Vektoren und Bewegung in 2 Dimensionen 9 / 28 22. Okt. 2022
Oder anders ausgedrückt: die Komponente 𝐴𝑥 sagt uns zwei Dinge: wie
gross 𝐴⃗𝑥 ist und in welche Richtung der Achse 𝐴⃗𝑥 zeigt. Figur 3.13 zeigt
drei Beispiele, wie die Komponenten eines Vektors bestimmt werden.
Beachte ► 𝐴⃗𝑥 und 𝐴⃗𝑦 sind Komponentenvektoren. Sie haben einen
Betrag und eine Richtung. 𝐴𝑥 und 𝐴𝑦 sind nur Komponenten. Die
Komponenten 𝐴𝑥 und 𝐴𝑦 sind Skalare, einfach Zahlen (mit Einheiten),
die positiv oder negativ sein können. ◄
Vieles in der Physik wird in der Sprache der Vektoren ausgedrückt. Wir
werden häufig Vektoren in ihre Komponenten zerlegen oder einen
Vektor aus seinen Komponenten zusammensetzen müssen und dabei
zwischen der graphischen und der Komponentenschreibweise hin und
her wechseln.
Wir wollen mit der Aufgabe beginnen, einen Vektor in seine x- und y-
Komponente zu zerlegen. Figur 3.14a zeigt einen Vektor 𝐴⃗ unter einem
Winkel 𝜃 oberhalb der Horizontalen, Es ist wesentlich, ein Bild oder ein
Diagramm wie dieses hier zu verwenden, um den Winkel zu definieren,
mit dem die Richtung des Vektors beschrieben wird. 𝐴⃗ zeigt nach rechts
oben, womit gemäss Taktik-Box 3.3 die Komponenten 𝐴𝑥 und 𝐴𝑦 beide
positiv sind.
Wie in Figur 3.14b dargestellt, können wir die Komponenten durch
Anwendung der Trigonometrie bestimmen. Für diesen Fall hier finden
wir
𝐴𝑥 = 𝐴cos𝜃
(3.9)
𝐴𝑦 = 𝐴sin𝜃
wobei 𝐴 der Betrag oder die Länge des Vektors 𝐴⃗ ist. Diese Gleichungen wandeln die Länge-Winkel-Beschreibung
des Vektors 𝐴⃗ um in die Vektorkomponenten, aber sie sind nur dann korrekt, wenn 𝜃 von der Horizontalen aus
gemessen ist.
Umgekehrt können wir, wenn wir die x- und y-Komponente eines
Vektors kennen, daraus die Länge und die Richtung des Vektors
bestimmen, so wie in Figur 3.15 gezeigt. Da 𝐴 in Figur 3.15 die Hypotenuse
eines rechtwinkligen Dreiecks ist, ist gemäss dem Satz von Pythagoras deren
Länge gegeben durch
𝐴 = √𝐴2𝑥 + 𝐴2𝑦 (3.10)
Ebenso ist der Tangens des Winkels 𝜃 das Verhältnis der
gegenüberliegenden Seite zur anliegenden Seite, also
𝐴𝑦
𝜃 = tan−1 ( )
𝐴𝑥
(3.11)
03 Vektoren und Bewegung in 2 Dimensionen 10 / 28 22. Okt. 2022
Gleichungen 3.10 und 3.11 können als die Umkehrung (das Inverse) der
Gleichungen 3.9 verstanden werden.
Wie ändern sich die Dinge, wenn der Vektor nicht nach rechtsoben
zeigt, das heisst, wenn eine der Komponenten negativ ist? Figur 3.16 zeigt
einen Vektor 𝐶⃗, der nach rechtunten gerichtet ist. In diesem Fall zeigt der
Komponentenvektor 𝐶⃗𝑦 nach unten, in die negative y-Richtung, sodass die
y-Komponente 𝐶𝑦 eine negative Zahl ist. Der Winkel 𝜑 wird, wie gezeichnet,
von der y-Achse aus gemessen, sodass die Komponenten von 𝐶⃗ gegeben
sind durch
𝐶𝑥 = 𝐶sin𝜑
(3.12)
𝐶𝑦 = −𝐶cos𝜑
Die Rollen von Sinus und Kosinus sind gegenüber Gleichungen 3.9 vertauscht, weil der Winkel 𝜑 gegenüber der
Vertikalen und nicht der Horizontalen gemessen ist.
Beachte ► Ob bei der x- und y-Komponente der Sinus oder der Kosinus verwendet wird, hängt
davon ab, wie Sie den Winkel des Vektors definieren. Wie oben bemerkt, müssen Sie ein Diagramm zeichnen,
um den verwendeten Winkel zu definieren und Sie müssen sicherstellen, auf dieses Diagramm zu verweisen,
wenn Sie die Komponenten berechnen. Verwenden Sie Gleichungen 3.9 und 3.12 nicht als generelle Regeln,
denn sie sind es nicht! Sie erscheinen in dieser Form, weil wir die Winkel so definiert haben. ◄
Anmerkung des Übersetzers: nicht ganz so wild! Es gibt sehr wohl eine Regel, wie die Winkel gemessen werden: von der
positiven x-Achse aus im Gegenuhrzeigersinn! Dann ergeben Gleichungen 3.9 immer die korrekten x- und y-
Komponenten, egal, in welche Richtung der Vektor zeigt! Probieren Sie es aus. Dabei nur nicht vergessen, dass der
Winkel immer von der positiven x-Achse aus gemessen wird. Der Winkel 𝜑 des Vektors 𝐶⃗ in Figur 3.16 hat damit
einen Wert zwischen 270° und 360°. Der Kosinus eines Winkels in diesem Bereich ist positiv, der Sinus negativ, und
oh Wunder, Gleichung 3.9 ergibt das richtige Vorzeichen für die Vektorkomponenten! Nein, nicht oh Wunder, das
ist ja nichts anderes als die Definition des Sinus und des Kosinus am Einheitskreis!!!
Als Nächstes wollen wir uns das «umgekehrte» Problem für diesen Fall anschauen: die Länge und die Richtung
des Vektors bestimmen, wenn die Komponenten gegeben sind. Das Vorzeichen der Komponenten spielt keine Rolle
beim Bestimmen der Länge; da der Satz von Pythagoras immer funktioniert, um die Länge des Vektors zu
bestimmen, da durch das Quadrieren allfällige Unsicherheiten wegen dem Vorzeichen verschwinden Die Länge des
Vektors in Figur 3.16 ist einfach
𝐶 = √𝐶𝑥2 + 𝐶𝑦2 (3.13)
Wenn wir die Richtung des Vektors aus seinen Komponenten bestimmen, müssen wir das Vorzeichen seiner
Komponenten miteinbeziehen. Um den Winkel des Vektors 𝐶⃗ in Figur 3.16 zu finden, braucht es die Länge des
Komponentenvektors 𝐶⃗𝑦 , was gleich dem Betrag von 𝐶𝑦 ist, also |𝐶𝑦 |. Somit hat Vektor 𝐶⃗ die Richtung
𝐶𝑥
𝜑 = tan−1 (
|𝐶𝑦 |
) (3.14)
Beachten Sie, dass sich hier die Rollen von x und y zu denen in Gleichungen 3.11 unterscheiden.
Anmerkung des Übersetzers:
Geht man stur von der einfachen Regel aus, dass der Winkel 𝜑 eines Vektors 𝐶⃗ im Gegenuhrzeigersinn von der +x-
Achse aus gemessen werden, dann gelten immer gleichzeitig die folgenden zwei Gleichungen
𝐶𝑦 𝐶𝑦
tan𝜑 =
𝐶𝑥
oder gleichbedeutend: 𝜑 = tan−1 ( )
𝐶𝑥
𝐶𝑦 𝐶𝑦
sin𝜑 =
𝐶
oder gleichbedeutend: 𝜑= sin−1 ( )
𝐶
mit 𝐶 = √𝐶𝑥2 + 𝐶𝑦2
Egal, was das Vorzeichen der x- und y-Komponente ist, der Winkel 𝜑 des Vektors ist damit immer eindeutig bestimmt!
Es gibt also nicht die geringsten Zweifel und Unsicherheiten. Zum Bestimmen der Winkel ausgehend von den
vorzeichenbehafteten Komponenten kann ausnahmslos immer das gleiche Verfahren angewendet werden!
Mehr dazu wird noch im Unterricht folgen und es wird auch noch ein Theorie-Zusatzblatt geben.
03 Vektoren und Bewegung in 2 Dimensionen 11 / 28 22. Okt. 2022
Beispiel 3.3 Komponenten eines Beschleunigungsvektors bestimmen
Finden Sie die x- und y-Komponenten des in der Figur 3.17 gezeigten Beschleunigungsvektors 𝑎⃗.
Vorbereiten Es ist wichtig, die Vektoren zu zeichnen. Das Anfertigen einer Skizze ist bei der Aufstellung
dieser Aufgabe entscheidend. Figur 3.18 zeigt den ursprünglichen Vektor 𝑎⃗ aufgeteilt in Komponenten parallel
zu den Achsen.
Lösen Der Beschleunigungsvektor 𝑎⃗ = (6.0 m/s2, 30° unter die negative x-Achse) zeigt nach links (in die
negative x-Richtung) und nach unten (in die negative y-Richtung), womit die beiden Komponenten 𝑎𝑥 und 𝑎𝑦
beide negativ sind.
𝑎𝑥 = −𝑎 ⋅ cos30° = −(6.0 m⁄s2 )cos30° = −5.2 m⁄s2
𝑎𝑦 = −𝑎 ⋅ sin30° = −(6.0 m⁄s2 )sin30° = −3.0 m⁄s2
Bewerten Der Betrag der y-Komponente ist kleiner als derjenige der x-Komponente, was als gute
Überprüfung unserer Arbeit auch mit der Figur 3.18 übereinstimmt. 𝑎𝑥 und 𝑎𝑦 haben beide die gleichen
Einheiten wie der Vektor 𝑎⃗. Beachten Sie, dass wir das Minuszeichen von Hand einsetzen mussten, weil der
Vektor nach links unten zeigt, wie wir gesehen haben.
(Anmerkung des Übersetzers: Wenn nach der üblichen Konvention der Winkel von der positiven x-Achse her im
Gegenuhrzeigersinn gemessen wird, dann beträgt hier der Winkel nicht 30°, sondern 210°. Werden die Winkel so
gemessen, dann gelten die Ausdrücke 3.12 IMMER und es müssen keine Vorzeichen von Hand angepasst
werden.) Also: 𝑎𝑥 = 𝑎 ⋅ cos (210°) = (6.0 m⁄s2 )cos (210°) = −5.2 m⁄s2
𝑎𝑦 = 𝑎 ⋅ sin (210°) = (6.0 m⁄s2 )sin (210°) = −3.0 m⁄s2
__________________________________________________________________________________________
Halt-Moment-Mal 3.3
Was sind die x- und y-Komponenten 𝐶𝑥 und 𝐶𝑥 des Vektors 𝐶⃗?
───────────────────────────────────────────────────────────────
Arbeiten mit Komponenten
Wir haben gesehen, wie Vektoren graphisch addiert werden, aber es gibt einen
einfacheren Weg: Komponenten verwenden. Um dies zu illustrieren, schauen wir
uns die Summe 𝐶⃗ = 𝐴⃗ + 𝐵⃗⃗ der in Figur 3.19 gezeigten Vektoren an. Wie Sie sehen
können, sind die Komponentenvektoren von 𝐶⃗ die Summe der
Komponentenvektoren von 𝐴⃗ und 𝐵⃗⃗. Dasselbe gilt auch für die Komponenten:
𝐶𝑥 = 𝐴𝑥 + 𝐵𝑥 und 𝐶𝑥 = 𝐶𝑥 + 𝐶𝑥 .
⃗⃗ = 𝐴⃗ + 𝐵
Falls 𝐷 ⃗⃗ + 𝐶⃗ + ⋯ ist, gilt für die x- und y-Komponenten des resultierenden
Vektors 𝐷 ⃗⃗ ganz allgemein
𝐷𝑥 = 𝐴𝑥 + 𝐵𝑥 + 𝐶𝑥 + ⋯ (3.15)
𝐷𝑦 = 𝐴𝑦 + 𝐵𝑦 + 𝐶𝑦 + ⋯
Diese Methode der Vektoraddition wird algebraische Addition genannt.
03 Vektoren und Bewegung in 2 Dimensionen 12 / 28 22. Okt. 2022
Beispiel 3.4 Anwenden der algebraischen Addition zur Bestimmung der Verschiebung
eines Vogels
Ein Vogel fliegt von einem Baum aus 100 Meter nach Osten, dann 200 Meter nach Nordwesten, (also von der
Westrichtung aus 45° nach Norden). Was ist die resultierende Verschiebung des Vogels?
Vorbereiten Figur 3.20a zeigt die Verschiebevektoren 𝐴⃗ =
(100m, nach Osten) und 𝐵 ⃗⃗ = (200m, nach Nordwesten) und ebenso
den resultierenden Verschiebevektor 𝐶⃗. Beim graphischen
Addieren fügen wir Vektoren aneinander an, Fusspunkt an Spitze,
aber beim algebraischen Addieren ist es üblicherweise einfacher, sie
alle vom Ursprung her zu zeichnen. In Figur 3.20b sind die
Vektoren nochmals gezeichnet, diesmal mit gemeinsamen
Fusspunkten.
Lösen Um Vektoren algebraisch zu addieren, müssen wir deren
Komponenten kennen. Aus der Figur ergeben sie sich zu
𝐴𝑥 = 100 m
𝐴𝑦 = 0 m
𝐵𝑥 = −(200 m)cos45° = −141 m
𝐵𝑦 = (200 m)sin45° = 141 m
Aus der Figur haben wir entnommen, dass 𝐵⃗⃗ eine negative x-Komponente hat. 𝐴⃗ und 𝐵⃗⃗ algebraisch mit
Komponenten addiert ergibt
𝐶𝑥 = 𝐴𝑥 + 𝐵𝑥 = 100m − 131m = −41 m
𝐶𝑦 = 𝐴𝑦 + 𝐵𝑦 = 0m + 141m = 141 m
Der Betrag der resultierenden Verschiebung 𝐶⃗ beträgt
𝐶 = √𝐶𝑥2 + 𝐶𝑦2 = √(−41m)2 + (141m)2 = 147 m
Der Winkel 𝜃, so wie in Figur 3.20 definiert, beträgt
𝐶𝑦 141 m
𝜃 = tan−1 (|𝐶 |) = tan−1 ( ) = 74°
𝑥 41 m
Somit ergibt sich die resultierende Verschiebung des Vogels als 𝐶⃗ = (147m, 74° nördlich von Westen)
Bewerten Die resultierenden Werte für 𝐶𝑥 und 𝐶𝑦 stimmen überein mit dem, was wir aus der Skizze in Figur
3.20 erwarten. Die geometrische Addition war eine gute Überprüfung des Resultats, das wir durch algebraische
Addition erhalten haben.
Auch Vektorsubtraktion und Multiplikation eines Vektors mit einem Skalar können mit Komponenten sehr
⃗⃗ zu finden, würden wir rechnen
⃗⃗ = 𝑃⃗⃗ − 𝑄
einfach durchgeführt werden. Um 𝐷
𝐷𝑥 = 𝑃𝑥 − 𝑄𝑥
(3.16)
𝐷𝑦 = 𝑃𝑦 − 𝑄𝑦
In gleicher Weise erhalten wir für die Komponenten von 𝑇⃗⃗ = 𝑐𝑆⃗
𝑇𝑥 = 𝑐𝑆𝑥
(3.17)
𝑇𝑦 = 𝑐𝑆𝑦
In den folgenden Kapiteln wird häufig Gebrauch von diesen Vektorgleichungen gemacht werden. Zum Beispiel
werden Sie lernen, dass die Gleichung zur Berechnung der resultierenden Kraft, die auf ein durch Rutschen zum
Stillstand kommendes Auto wirkt, gegeben ist durch
⃗⃗⃗ + 𝑓⃗
𝐹⃗ = 𝑛⃗⃗ + 𝑤 (3.18)
Gleichung 3.18 ist eigentlich nur eine abgekürzte Form, um zwei Gleichungen simultan zu schreiben:
𝐹𝑥 = 𝑛𝑥 + 𝑤𝑥 + 𝑓𝑥
(3.19)
𝐹𝑦 = 𝑛𝑦 + 𝑤𝑦 + 𝑓𝑦
03 Vektoren und Bewegung in 2 Dimensionen 13 / 28 22. Okt. 2022
Mit anderen Worten: eine Vektorgleichung ist folgendermassen zu verstehen: Setze die x-Komponenten auf beiden
Seiten des Gleichheitszeichens gleich, und dann setze auch die y-Komponenten gleich. Die Vektorschreibweise
erlaubt es, diese zwei Gleichungen in einer kompakteren Form zu schreiben.
Geneigte Achsen
Auch wenn wir für gewöhnlich die x-Achse horizontal legen, gibt es keine
Forderung, dass dies so sein muss. In Kapitel 1 haben wir gesehen, dass es
für eine Bewegung an einem Hang oft angebrachter ist, die x-Achse entlang
des Hangs zu legen. Wenn wir die y-Achse hinzufügen (im rechten
Winkel!), erhalten wir ein geneigtes Koordinatensystem, so wie dasjenige in
Figur 3.21 gezeigte.
Die Komponenten bei geneigten Achsen zu finden, ist nicht
schwieriger, als was wir bereits gemacht haben. Vektor 𝐶⃗ in Figur 3.21 kann
in die Komponentenvektoren 𝐶⃗𝑥 und 𝐶⃗𝑦 zerlegt werden mit 𝐶𝑥 = 𝐶 cos𝜃
und 𝐶𝑦 = 𝐶 sin𝜃.
__________________________________________________________________________________________
Halt-Moment-Mal 3.4
Der Winkel 𝜙, der die Richtung von 𝐶⃗ bestimmt, berechnet sich mit
A. tan−1 (𝐶𝑥 ⁄𝐶𝑦 ) B. tan−1 (𝐶𝑥 ⁄|𝐶𝑦 |)
C. tan−1 (|𝐶𝑥 |⁄|𝐶𝑦 |) D. tan−1 (𝐶𝑦 ⁄𝐶𝑥 )
E. tan−1 (𝐶𝑦 ⁄|𝐶𝑥 |) F. tan−1 (|𝐶𝑦 |⁄|𝐶𝑥 |)
__________________________________________________________________________________________
3.4 Bewegung auf einer Rampe
In diesem Abschnitt werden wir das Problem der Bewegung auf einer Rampe oder einer schiefen Ebene untersuchen.
Aus drei Gründen betrachten wir dieses Problem. Erstens wird es eine gute Übung dafür sein, um mit Vektoren eine
Bewegung zu analysieren. Zweitens ist es ein einfaches Problem, für das wir eine exakte Lösung finden können. Und
drittens hat dieses scheinbar abstrakte Problem reale und wichtige Anwendungen.
Wir beginnen mit einem Beispiel mit konstanter Geschwindigkeit, um etwas Übung mit Vektoren und
Komponenten zu erlangen, um dann zum allgemeineren Fall von beschleunigter Bewegung überzugehen.
Konzept-Beispiel 3.5 Herausfinden, wieviel Höhe an einer Steigung gewonnen wird
Ein Auto fährt mit einem konstanten Tempo von 15 m/s eine starke 10%-Steigung hinauf. Wieviel Höhe hat das
Auto nach 10 s gewonnen?
Vorbereiten Figur 3.22 ist ein visueller Überblick
mit der Definition der x- und y-Achsen. Der
Geschwindigkeitsvektor 𝑣⃗ zeigt den Hang hinauf. Wir
sind an der vertikalen Bewegung des Autos interessiert,
sodass wir 𝑣⃗ wie dargestellt in die
Komponentenvektoren 𝑣⃗𝑥 und 𝑣⃗𝑦 aufteilen.
Lösen Die Geschwindigkeitskomponente, die wir benötigen, ist 𝑣𝑦 , was die vertikale Bewegung des Autos
beschreibt. Mit den oben beschriebenen Regeln zur Bestimmung der Komponenten angewendet, finden wir
15m
𝑣𝑦 = 𝑣 sinθ = ( ) sin10° = 2.6 m/s
s
03 Vektoren und Bewegung in 2 Dimensionen 14 / 28 22. Okt. 2022
Da die Geschwindigkeit konstant ist, beträgt die vertikale Positionsverschiebung des Autos (das heisst die
gewonnene Höhe) innerhalb der 10 s
∆𝑦 = 𝑣𝑦 ∆𝑡 = (2.6 m/s)(10 s) = 26 m
Bewerten Das Auto fährt mit einer recht flotten Geschwindigkeit (15 m/s entsprechen rund 54 km/h) einen
steilen Hang hinauf, sodass es innerhalb von 10 s eine respektable Höhe gewinnen sollte. 26 m scheint sinnvoll.
Beschleunigte Bewegung auf einer Rampe
Figur 3.23a zeigt eine Kiste, wie sie auf einer reibungsfreien (dh.
glatten), um den Winkel 𝜃 geneigten Rampe hinuntergleitet. Die
Kiste wird beschleunigt wegen der Wirkung der Gravitation,
aber sie ist gezwungen, parallel zur Fläche zu beschleunigen. Wie
gross ist die Beschleunigung?
In Figur 3.23b ist ein Bewegungsdiagramm für die Kiste
gezeichnet. Es hat eine Beschleunigung, weil die
Geschwindigkeit sich ändert, mit beiden, den Beschleunigungs-
und Geschwindigkeitsvektoren parallel zur Rampe. Wir können
Nutzen ziehen aus den Eigenschaften von Vektoren, um die
Beschleunigung der Kiste herauszufinden. Um das zu tun, wird
in Figur 3.23c ein mit der x-Achse entlang der Rampe und der
y-Achse senkrecht dazu ausgerichtetes Koordinatensystem
erstellt. Die ganze Bewegung wird entlang der x-Achse erfolgen.
Würde die schiefe Ebene plötzlich verschwinden, hätte das
Objekt eine freie Fall-Beschleunigung 𝑎⃗𝑓𝑟𝑒𝑖𝑒𝑟 𝐹𝑎𝑙𝑙 direkt nach
unten. Wie in Figur 3.23c gezeigt, kann dieser
Beschleunigungsvektor in zwei Komponentenvektoren
aufgeteilt werden: in einen Vektor 𝑎⃗𝑥 parallel zur schiefen
Ebene und einen Vektor 𝑎⃗𝑦 senkrecht zur schiefen Ebene.
Gemäss den Regeln der Vektoraddition, die wir früher in
diesem Kapitel studiert haben, gilt 𝑎⃗𝑓𝑟𝑒𝑖𝑒𝑟 𝐹𝑎𝑙𝑙 = 𝑎⃗𝑥 + 𝑎⃗𝑦 .
Das Bewegungsdiagramm zeigt, dass die tatsächliche
Beschleunigung des Objekts parallel zur schiefen Ebene
verläuft. Die Oberfläche der schiefen Ebene «blockiert»
irgendwie die andere Komponente 𝑎⃗𝑦 der Beschleunigung
durch einen Prozess, den wir im Kapitel 5 untersuchen werden,
aber 𝑎⃗𝑥 ist ungehindert. Es ist diese Komponente von
𝑎⃗𝑓𝑟𝑒𝑖𝑒𝑟 𝐹𝑎𝑙𝑙 , parallel zur schiefen Ebene, die das Objekt beschleunigt.
Mittels Trigonometrie können wir den Betrag dieser Beschleunigung berechnen. Figur 3.23c zeigt,
dass die drei Vektoren 𝑎⃗𝑓𝑟𝑒𝑖𝑒𝑟 𝐹𝑎𝑙𝑙 , 𝑎⃗𝑦 und 𝑎⃗𝑥 ein rechtwinkliges Dreieck mit Winkel 𝜃 wie abgebildet
formen. Dieser Winkel ist derselbe wie der Winkel der schiefen Ebene. Gemäss Definition ist der Betrag
von 𝑎⃗𝑓𝑟𝑒𝑖𝑒𝑟 𝐹𝑎𝑙𝑙 gleich 𝑔. Dieser Vektor ist die Hypotenuse eines rechtwinkligen Dreiecks. Der Vektor 𝑎⃗𝑥 ,
der uns interessiert, liegt gegenüber dem Winkel 𝜃. Somit beträgt der Wert der Beschleunigung entlang
einer reibungslosen Schräge
𝑎𝑥 = ±𝑔 sin𝜃 (3.20)
Beachte ► Das korrekte Vorzeichen hängt von der Richtung ab, in der die Rampe geneigt ist.
Die Beschleunigung in Figur 3.23 beträgt +𝑔 sinθ, aber spätere Beispiele werden Situationen zeigen,
in denen die Beschleunigung −𝑔 sinθ beträgt. ◄
Wir wollen uns Gleichung 3.20 ansehen, um sicherzustellen, dass sie Sinn macht. Eine gute Art das zu
tun, besteht darin, limitierende Fälle zu betrachten, bei denen der Winkel an einem Ende des
Wertebereichs ist. IN diesen Fällen ist die Physik klar und wir können unser Resultat vergleichen. So
wollen wir also zwei solche Möglichkeiten betrachten:
03 Vektoren und Bewegung in 2 Dimensionen 15 / 28 22. Okt. 2022
1.) Angenommen, die Ebene ist perfekt horizontal, mit 𝜃 = 0°. Wenn Sie ein Objekt auf eine
horizontale Fläche stellen, erwarten sie, dass es dort in Ruhe bleibt und nicht beschleunigt wird.
Gleichung 3.20 ergibt 𝑎𝑥 = 0 für 𝜃 = 0°, in Übereinstimmung mit unserer Erwartung.
2.) Nehmen Sie nun an, Sie neigen die Fläche bis sie vertikal wird, mit 𝜃 = 90°. Sie wissen, was dann
passiert: Das Objekt wird im freien Fall sein, parallel zur vertikalen Oberfläche. Gleichung 3.20
ergibt 𝑎𝑥 = 𝑔 für 𝜃 = 90°, wiederum in Übereinstimmung mit unserer Erwartung.
Beachte ► Die Antwort überprüfen, indem solche limitierende Fälle betrachtet werden, ist
eine sehr gute Art, um zu sehen, ob die Antwort Sinn macht. Dies werden wir häufig im Schritt
«Bewerten» machen. ◄
Extreme Physik Ein Skirennfahrer, auf breiten Ski mit wenig Reibung,
mit einem aerodynamischen Helm und tief in der Hocke, um möglichst
wenig Luftwiderstand zu haben, fährt in gerade Linie einen steilen Hang
hinunter. Das ist ziemlich so wie ein Objekt, das eine reibungsfreie
Rampe hinunterrutscht. Es gibt eine maximale Geschwindigkeit, die der
Skirennfahrer am Ende des Hangs möglicherweise erreichen kann.
Beispiel 3.6 Maximal mögliches Tempo eines Skifahrers
Das Willamette Pass Ski Gebiet war der Austragungsort für das 1992 U.S. National Ski-
Geschwindigkeitsrennen. Die Skifahrer starteten aus dem Stillstand und beschleunigten dann den Berg
hinunter auf einer Strecke mit ziemlich konstantem Gefälle mit dem Ziel, am Ende der Rennstrecke
die höchstmögliche Geschwindigkeit zu erreichen. Während dieser Beschleunigungsphase fuhren die
Skirennfahrer 360 m während sie 170 m an vertikaler Strecke verloren. Was ist das höchste Tempo, das
ein Skifahrer am Ende dieser Strecke erreichen kann?
Vorbereiten Wir beginnen mit dem visuellen
Überblick in Figur 3.24. Das Bewegungsdiagramm
zeigt die Beschleunigung des Skifahrers und die bild-
hafte Darstellung gibt einen Überblick über die
Aufgabe inklusive der Abmessungen des Hangs.
Wie vorher legen wir die x-Achse entlang des Hangs.
Lösen Der schnellstmögliche Lauf wäre einer ohne
Reibung und Luftwiderstand was bedeutet, dass die
Beschleunigung den Hang hinunter gegeben ist durch
Gleichung 3.20. Die Beschleunigung ist in der
positiven x-Richtung, sodass wir das positive
Vorzeichen benutzen. Was ist der Winkel in Gleichung 3.20? Figur 3.24 zeigt, dass der 360 m lange
Hang die Hypotenuse eines Dreiecks mit Höhe 170 m ist, sodass gemäss Trigonometrie gilt
170m
sinθ =
360m
was für den Winkel 𝜃 ergibt 𝜃 = sin−1(170/360) = 28°. Gleichung 3.20 ergibt dann
𝑎𝑥 = +𝑔 sin𝜃 = (9.8 m⁄s 2 )(sin28°) = 4.6 m⁄s 2
Für eine lineare Bewegung mit konstanter Beschleunigung können wir die dritte der kinematischen
Gleichungen in Synthese 2.1 verwenden: (𝑣𝑥 )2𝑓 = (𝑣𝑥 )2𝑖 + 2𝑎𝑥 ∆𝑥. Die Anfangsgeschwindigkeit (𝑣𝑥 )𝑖 ist
Null, sodass gilt:
(𝑣𝑥 )𝑓 = √2𝑎𝑥 ∆𝑥 = √2(4.6 m⁄s2 )(360 m) = 58 m/s
Das ist die Distanz entlang des
Hangs, die Länge der Rennstrecke
03 Vektoren und Bewegung in 2 Dimensionen 16 / 28 22. Okt. 2022
Das ist die höchste Geschwindigkeit, die sich ein Skifahrer am Ende der Rennstrecke erhoffen kann.
Jegliche Reibung und Luftwiderstand würden dieses Tempo reduzieren.
Bewerten Als Endgeschwindigkeit haben wir 58 m/s berechnet, etwa 210 km/h, ein
vernünftiger Wert, weil wir bei diesem Sport eine hohe Geschwindigkeit erwarten. In diesem
erwähnten Rennen betrug die tatsächliche Siegergeschwindigkeit 178 km/h, nicht viel weniger als
unser berechnetes Resultat. Offensichtlich nützen die Anstrengungen, Reibung und Luftwiderstand zu
minimieren!
Skis auf Schnee haben eine sehr geringe Reibung, aber es gibt andere Wege, um Reibung zwischen
Flächen zu verringern. Zum Beispiel rollt ein Achterbahnwagen auf reibungsarmen Rädern entlang der
Bahn. Auf die Waagen wirkt keine Antriebskraft, nachdem sie zuoberst auf dem ersten Hügel losgelassen
wurden: das Tempo ändert sich nur aufgrund der Gravitation. Die Waagen werden schneller, während sie
nach unten gehen und sie werden langsamer, wenn sie nach oben steigen.
Beispiel 3.7 Geschwindigkeit einer Achterbahn
Eine klassische hölzerne Achterbahn hat Waagen, die einen ersten Hügel
hinuntergehen, um Geschwindigkeit zu gewinnen. Die Waagen steigen dann
einen zweiten Hügel hinauf mit einer Steigung von 30°. Wenn die Waagen
zuunterst mit einem Tempo von 25 m/s fahren und sie 2.0 s brauchen, um
diesen Hügel hinaufzukommen, wie schnell sind sie zuoberst?
Vorbereiten Wir beginnen mit dem visuellen Überblick in Figur 3.25, der
ein Bewegungsdiagramm, eine bildhafte Darstellung und eine Liste mit den
Werten umfasst. Wir haben das mit einer solchen Skizze
getan, wie Sie eine für Ihre Hausaufgaben zeichnen
würden. Beachten Sie, wie sich das Bewegungsdiagramm
in Figur 3.25 sich von dem der Aufgabe 3.6 unterschei-
det: Die Geschwindigkeit nimmt ab, während die
Waagen sich den Hügeln hinaufbewegen, sodass der
Beschleunigungsvektor entgegen der Richtung des
Geschwindigkeitsvektors ist. Die Bewegung ist entlang
der x-Achse, sodass die Komponente 𝑎𝑥 negativ ist.
Beachten Sie, dass wir im Bewegungsdiagramm nur einen
einzigen Beschleunigungsvektor gezeichnet haben, eine
vernünftige Abkürzung, da wir wissen, dass die Beschleunigung konstant ist. Ein Vektor kann die
Beschleunigung für die ganze Bewegung darstellen.
Lösen Um die Schlussgeschwindigkeit zu bestimmen, müssen wir die Beschleunigung kennen. Wir
nehmen an, dass es keine Reibung und keinen Luftwiderstand hat, sodass die Grösse der
Beschleunigung der Achterbahn gegeben ist durch Gleichung 3.20, zusammen mit dem negativen
Vorzeichen:
𝑎𝑥 = −𝑔 sin𝜃 = −(9.8 m⁄s 2 ) sin30° = −4.9 m⁄s 2
Das Tempo zuoberst auf dem Hügel kann dann mit unseren kinematischen Gleichungen für die
Geschwindigkeit berechnet werden:
(𝑣𝑥 )𝑓 = (𝑣𝑥 )𝑖 + 𝑎𝑥 ∆𝑡 = 25 m/s + (−4.9 m⁄s2 )(2.0 s) = 15 m/s
Bewerten Das Tempo zuoberst auf dem Hügel ist geringer als am Fuss, so wie es sein sollte,
aber der Waagen fährt zuoberst immer noch recht schnell, rund 54 km/h. Das erscheint sinnvoll: Eine
schnelle Fahrt ist eine lustige Fahrt!
---------------------------------------------------------------------------------------------------------------------------
03 Vektoren und Bewegung in 2 Dimensionen 17 / 28 22. Okt. 2022
Halt-Moment-Mal 3.5 Ein Eisblock rutscht eine Rampe hinunter. Für
welche Höhe und Basislänge ist die Beschleunigung am grössten?
A. Höhe 4 m, Basis 12 m B. Höhe 3 m, Basis 6 m
C. Höhe 2 m, Basis 5 m D. Höhe 1 m, Basis 3 m
---------------------------------------------------------------------------------------------------------------------------
3.5 Relative Geschwindigkeit
Wir haben es jetzt einige Male mit Aufgaben zu tun gehabt, bei denen es in etwa geheissen hat: «ein Auto fährt mit
30 m/s» oder «ein Flugzeug fliegt mit 300 m/s». Aber wie wir sehen werden, müssen wir ein wenig spezifischer sein.
In Figur 3.26 schauen Amy, Bill und Carlos einem Läufer zu. Gemäss Amy beträgt die Geschwindigkeit des
Läufers 𝑣𝑥 = 5 m⁄s. Aber für Bill, der an der Seite des Läufers auf dem Velo
fährt, bewegt der Läufer seine Beine auf und ab, bewegt sich relativ zu Bill aber
weder vorwärts noch rückwärts. Aus der Sicht von Bill ist die Geschwindigkeit
des Läufers 𝑣𝑥 = 0 m⁄s. Carlos sieht im Rückspiegel, wie der Läufer nach
zurückfällt, in der negativen Richtung, und in jeder Sekunde 10 m weiter von ihm
entfernt ist. Aus Sicht von Carlos ist die Geschwindigkeit des Läufers 𝑣𝑥 =
−10 m⁄s. Was ist die wahre Geschwindigkeit des Läufers?
Geschwindigkeit ist nicht ein Konzept, das richtig oder falsch sein kann.
Die Geschwindigkeit des Läufers relativ zu Amy ist 5 m/s; das heisst, seine
Geschwindigkeit beträgt 5 m/s in einem Koordinatensystem, das an Amy festgemacht ist und in dem Amy in Ruhe
ist. Die Geschwindigkeit des Läufers relativ zu Bill ist 0 m/s, und die Geschwindigkeit relativ zu Carlos ist -10 m/s.
Das sind alles zulässige Beschreibungen der Bewegung des Läufers.
Relative Geschwindigkeit
Angenommen, wir wissen, dass die Geschwindigkeit des Läufers relativ zu Amy 5 m/s
beträgt. Diese Geschwindigkeit wollen wir als (𝑣𝑥 )𝑅𝐴 = 5 m⁄s. bezeichnen. Der
zweite Index «RA» bedeutet Runner (Läufer) relativ zu Amy. Ebenso wissen wir, dass
die Geschwindigkeit von Carlos relativ zu Amy 15 m/s beträgt. Dies schreiben wir als
(𝑣𝑥 )𝐶𝐴 = 15 m⁄s. Genauso zulässig ist es, Amy’s Geschwindigkeit relativ zu Carlos zu
berechnen. Aus der Sicht von Carlos bewegt sich Amy mit 15 m/s nach links. Wir
schreiben Amy’s Geschwindigkeit relativ zu Carlos als (𝑣𝑥 )𝐴𝐶 = −15 m⁄s. Beachten
Sie, dass gilt (𝑣𝑥 )𝐴𝐶 = −(𝑣𝑥 )𝐶𝐴 .
Mit der Geschwindigkeit des Läufers relativ zu Amy und Amy’s Geschwindigkeit Der Wurf zum Gold Ein
relativ zu Carlos, können wir die Geschwindigkeit des Läufers relativ zu Carlos Speerwerfer wirft, während er
berechnen, indem wir die beiden bekannten Geschwindigkeiten miteinander in rennt. Es ist schwieriger, den
Verbindung bringen. Die Indizes, so wie wir sie definiert haben, sind bei dieser Speer während dem Rennen zu
werfen, aber es gibt einen sehr
Verbindung unsere Leitschnur.
guten Grund dafür. Die
(𝑣𝑥 )𝑅𝐶 = (𝑣𝑥 )𝑅𝐴 + (𝑣𝑥 )𝐴𝐶 (3.21) Wurfdistanz wird bestimmt
durch die Geschwindigkeit des
Speers relativ zum Boden, was
Das «A» erscheint auf der rechten Seite durch die Summe der
des ersten Ausdrucks und auf der linken Wurfgeschwindigkeit und der
beim zweiten. Bei der Kombination Geschwindigkeit des
dieser Geschwindigkeiten «streichen» Speerwerfers gegeben ist.
wir das A und erhalten (𝑣𝑥 )𝑅𝐶 . Schneller Rennen bedeutet ein
längerer Wurf.
Im Allgemeinen können zwei relative Geschwindigkeiten so addiert werden, indem
die Indizes wie in Gleichung 3.21 «gestrichen» werden. Im Kapitel 27, wo wir Relativität behandeln werden, werden
wir ein strengeres Schema zur Berechnung relativer Geschwindigkeiten haben, aber dieses Verfahren hier reicht im
Moment für unsere Zwecke.
03 Vektoren und Bewegung in 2 Dimensionen 18 / 28 22. Okt. 2022
Beispiel 3.8 Geschwindigkeit eines Meeresvogels
Forscher, die im Südmeer mittels Satelliten die Bewegung von Albatrossen verfolgten, beobachteten einen Vogel,
der dauernd eine Geschwindigkeit von 35 m/s, fast 130 km/h, aufrecht hielt. Das erscheint erstaunlich schnell,
bis man realisiert, dass dieser Vogel hier mit dem Wind, der mit 23 m/s wehte, flog. Was war die
Luftgeschwindigkeit des Vogels, also seine Geschwindigkeit relativ zur Luft? Das ist ein wirklicheres Mass für
seine Fluggeschwindigkeit.
Vorbereiten Figur 3.27 zeigt den Wind und den
Albatros, die sich nach rechts bewegen, sodass alle
Geschwindigkeiten positiv sein werden. Gezeigt ist
die Geschwindigkeit (𝑣𝑥 )𝑏𝑤 des Vogels (bird) relativ
zum Wasser, was die gemessene Geschwindigkeit ist,
und die Geschwindigkeit (𝑣𝑥 )𝑎𝑤 der Luft (air) relativ
zum Wasser, was die bekannte Windgeschwindigkeit
ist. Gesucht ist die Luftgeschwindigkeit des Vogels,
die Geschwindigkeit des Vogels (bird) relativ zur
Luft (air).
Lösen Wir haben drei verschiedene Geschwindigkeiten bezeichnet, die in der Aufgabe wichtig sind:
(𝑣𝑥 )𝑏𝑤 , (𝑣𝑥 )𝑎𝑤 und (𝑣𝑥 )𝑏𝑎 . Die können wir in der üblichen Weise kombinieren.:
(𝑣𝑥 )𝑏𝑤 = (𝑣𝑥 )𝑏𝑎 + (𝑣𝑥 )𝑎𝑤
Um nach (𝑣𝑥 )𝑏𝑎 aufzulösen, werden die Terme umgeformt:
(𝑣𝑥 )𝑏𝑎 = (𝑣𝑥 )𝑏𝑤 − (𝑣𝑥 )𝑎𝑤 = 35 m⁄s − 23 m⁄s = 12 m⁄s
Bewerten 12 m⁄s , ungefähr 43 km/h, ist eine vernünftige Luftgeschwindigkeit für einen Vogel. Und sie ist
kleiner als die beobachtete Fluggeschwindigkeit, was Sinn macht, da der Vogel mit dem Wind fliegt.
Diese Methode, relative Geschwindigkeiten zu finden, kann auch in 2-dimensionalen Situationen angewendet
werden, was ein weiteres gutes Übungsbeispiel ist, um mit Vektoren zu arbeiten.
Beispiel 3.9 Bestimmung der Bodengeschwindigkeit eines Flugzeuges
Cleveland ist ungefähr 300 Meilen östlich von Chicago. Ein Flugzeug verlässt Chicago und fliegt mit 500 mph
nach Osten. Der Pilot vergass, das Wetter zu prüfen und weiss nicht, dass der Wind mit 100 mph Richtung
Süden bläst. Was ist die Geschwindigkeit des Flugzeugs relativ zum Boden?
Vorbereiten Figur 3.28 ist ein visueller Überblick
der Situation. Gegeben ist die Geschwindigkeit des
Flugzeugs (plane)relativ zur Luft (air) (𝑣⃗𝑝𝑎 ) die
Geschwindigkeit (𝑣⃗𝑎𝑔 ) der Luft (air) relativ zum
Boden (ground). Die Geschwindigkeit des Flugzeugs
relativ zum Boden ist die Vektorsumme dieser
beiden Geschwindigkeiten:
𝑣⃗𝑝𝑔 = 𝑣⃗𝑝𝑎 + 𝑣⃗𝑎𝑔
Diese Vektorsumme ist in Figur 3.28 dargestellt.
Lösen Das Tempo des Fliegers relativ zum Boden ist durch die Hypotenuse des rechtwinkligen Dreiecks in
Figur 3.28 gegeben:
2 + 𝑣2 =
𝑣𝑝𝑔 = √𝑣𝑝𝑎 𝑎𝑔 √(500 mph)2 + (100 mph)2 = 510 mph
Die Richtung des Flugzeugs kann durch den Winkel 𝜃 spezifiziert werden, der von der Ostrichtung her gemessen
wird:
100 mph
𝜃 = tan−1 ( ) = tan−1 ( 0.20) = 11°
500 mph
Somit beträgt die Geschwindigkeit des Flugzeugs relativ zum Boden
𝑣⃗𝑝𝑔 = (510 mph, 11° in Richtung Südosten)
Bewerten Die gute Nachricht ist, dass der Wind das Flugzeug relativ zum Boden etwas schneller macht. Die
schlechte Nachricht ist, dass der Wind das Flugzeugt in der falschen Richtung fliegen lässt!
03 Vektoren und Bewegung in 2 Dimensionen 19 / 28 22. Okt. 2022
__________________________________________________________________________________________
Halt-Moment-Mal 3.6 Das Wasser eines Flusses fliesst mit 3.0 m/s flussabwärts. Ein Boot fährt mit 5.0 m/s
gegen die Strömung flussaufwärts. Was ist das Tempo des Boots relativ zum Ufer?
A. 8.0 m/s B. 5.0 m/s C. 3.0 m/s D. 2.0 m/s
───────────────────────────────────────────────────────────────
03 Vektoren und Bewegung in 2 Dimensionen 20 / 28 22. Okt. 2022
3.6 Bewegung in zwei Dimensionen: Schiefer Wurf
Durch die Luft fliegende Bälle, Weitspringer und Autos, die gewagte Sprünge vollführen, sind alles Beispiele einer
zweidimensionalen Bewegung, die wir als schiefen Wurf bezeichnen. Der schiefe Wurf ist die Erweiterung des
freien Falls, den wir in Abschnitt 2.7 behandelt haben, auf zwei Dimensionen. Ein schiefer Wurf ist eine
Bewegung, die einzig und allein unter dem Einfluss der Gravitation stattfindet. Obwohl reale Objekte auch
durch Luftwiderstand beeinflusst werden, ist dessen Auswirkung bei vernünftig dichten Objekten mit einer mässigen
Geschwindigkeit klein, sodass wir ihn bei den Beispielen in diesem Kapitel vernachlässigen. Solange wir den
Luftwiderstand vernachlässigen können, vollführt jedes schief geworfene Objekt dieselbe Art von Bahn. Da die
Form der Bewegung immer dieselbe sein wird, werden die Strategien, die wir zum Lösen eines bestimmten Schiefen
Wurf-Problems entwickeln, ebenso auch auf alle anderen Probleme anwendbar sein.
Figur 3.29 zeigt eine Stroboskopaufnahme von zwei Bällen, von denen
einer horizontal geworfen und der andere gleichzeitig fallen gelassen
wurde. Die vertikale Bewegung der beiden Bälle ist identisch und beide
treffen im selben Moment auf dem Boden auf. Keiner der Bälle hat zu
Beginn eine Bewegung in der vertikalen Richtung und beide fallen
dieselbe Höhe h in derselben Zeit.
Die beiden Bälle erreichen den Boden zur selben Zeit. Das bedeutet,
dass die vertikale Bewegung des gelben Balls, also desjenigen, der
horizontal geworfen wurde, nicht beeinflusst wird durch die Tatsache,
dass er sich horizontal bewegt. Die vertikale Bewegung jedes Balls
entspricht dem freien Fall, der für alle Objekte gleich ist, wie wir in
Kapitel 2 gelernt haben. Eine sorgfältige Betrachtung der horizontalen
Bewegung des gelben Balls zeigt, dass es sich um eine konstante
Bewegung handelt. Die horizontale Bewegung setzt sich fort, als ob der
Ball nicht fallen würde.
Das heisst, bei einem schiefen Wurf hat die anfängliche horizontale Geschwindigkeit keinen Einfluss auf die
vertikale Bewegung und umgekehrt. Wir würden etwas ähnliches finden, wenn wir irgendeinen schiefen Wurf im
Detail betrachten würden. Somit können wir eine allgemeine Regel formulieren: Die horizontale und die vertikale
Bewegungskomponente eines schief geworfenen Objekts sind unabhängig voneinander.
Konzept-Beispiel 3.10 Zeit und Distanz bei Bällen, die von einem Tisch rollen
Zwei Bälle rollen auf einem Tisch auf die Kante zu, Ball 1 doppelt so schnell wie Ball 2. Beide Bälle rollen im
selben Augenblick über die Tischkante hinaus. Welcher Ball trifft zuerst auf dem Boden auf? Welcher Ball
kommt weiter?
Überlegen Die vertikale Bewegung ist für beide Bälle dieselbe, nämlich ein freier Fall, und beide fallen von
derselben Höhe herunter. Beide Bälle sind gleich lange in der Luft und treffen zum exakt gleichen Zeitpunkt auf
dem Boden auf. Während diesem Zeitintervall bewegen sich die zwei Bälle weiterhin mit derselben
Geschwindigkeit in horizontaler Richtung, die sie beim Verlassen der Tischkante hatten. Ball 2 hat die doppelte
horizontale Geschwindigkeit wie Ball 1; er wird deshalb auch 2-mal so weit fliegen.
Beurteilen Dieses Resultat macht Sinn. Die vertikale und die horizontale Bewegung sind unabhängig
voneinander, womit wir sie getrennt betrachten können. Wenn Sie zwei Objekte aus derselben Höhe fallen
lassen, treffen sie zur selben Zeit am Boden auf, und somit sollten beide Bälle zur selben Zeit landen. Und
während sie fallen, wird der eine seine höhere horizontale Bewegung weiterhin beibehalten und dadurch auch
weiterkommen.
Die Unabhängigkeit der horizontalen und vertikalen Bewegungen haben wir für den Fall eines horizontal
geworfenen Balls gezeigt, aber dieses Resultat gilt ebenso für ein unter einem Winkel abgeworfenes Objekt. Figur
3.30 zeigt das Bewegungsdiagramm für einen Ball, der unter einem Winkel in die Luft geworfen wurde. Der
Beschleunigungsvektor zeigt in dieselbe Richtung wie die Änderung der Geschwindigkeit, die wir mit den Methoden
aus Taktik-Box 3.2 berechnen können. Der Beschleunigungsvektor zeigt senkrecht nach unten. Eine genaue Analyse
würde zeigen, dass er einen Betrag von 9.80 m/s 2 hat. Das ist, was wir erwarten würden: Die Beschleunigung eines
schief geworfenen Objekts ist dieselbe wie die eines senkrecht nach unten fallenden Objekts, nämlich die
Freifallbeschleunigung.
03 Vektoren und Bewegung in 2 Dimensionen 21 / 28 22. Okt. 2022
Während der Bewegung des schief geworfenen Objekts wird die
Fallbeschleunigung die vertikale Komponente der Geschwindigkeit
ändern, aber die horizontalen Komponente der Geschwindigkeit wird
sich nicht ändern. Die vertikale Komponente der
Beschleunigung, 𝒂𝒚 , ist für alle Objekte im schiefen Wurf
gleich der vertrauten Beschleunigung g des freien Falls,
während die horizontale Komponente, 𝒂𝒙 , gleich Null ist.
Analyse eines schiefen Wurfs
Angenommen, Sie werfen im Hof einen Korbball, wie in Figur 3.31
dargestellt. Um den resultierenden schiefen Wurf zu untersuchen,
haben wir das Koordinatensystem mit der x-Achse horizontal und
der y-Achse vertikal gelegt. Da wir den Beginn eines schiefen Wurfs
Abwurf nennen, ist der Winkel der anfänglichen Geschwindigkeit mit
der Horizontalen (der x-Achse) der Abwurfwinkel. Wie Sie in
Abschnitt 3.3 gelernt haben, kann der anfängliche
Geschwindigkeitsvektor in eine x- und eine y-Komponente aufgeteilt
werden, wie in der Figur gezeigt.
Beachte ► Die Komponenten (𝑣𝑥 )𝑖 und (𝑣𝑦 )𝑖 sind
nicht immer positiv. Ein Objekt, das mit einem Winkel unterhalb
der Horizontalen abgeworfen wird (wie zum Beispiel ein von
einem Gebäudedach nach unten geworfener Ball), hat einen
negativen Wert für 𝜃 und (𝑣𝑦 )𝑖 . Das Tempo 𝑣𝑖 jedoch ist immer
positiv. ◄
Sobald der Basketball Ihre Hand verlassen hat, ist seine weitere
Bewegung durch die anfänglichen Komponenten der Geschwindigkeit
und der Beschleunigung bestimmt. Um zu sehen, was das konkret
bedeutet, wollen wir einen spezifischen Fall mit bestimmten
Zahlenwerten betrachten. Figur 3.32 zeigt ein Objekt, das mit einem
Tempo von 22.0 m/s in einem Winkel von 63° gegenüber der
Horizontalen abgeworfen wird. In der Figur 3.32a wird der anfängliche
Geschwindigkeitsvektor in seine horizontale und vertikale Komponente
aufgeteilt. In Figur 3.32b wird der Geschwindigkeitsvektor und seine
Komponenten jede Sekunde gezeigt. Da es keine horizontale
Beschleunigung gibt (𝑎𝑥 = 0), ändert der Wert von 𝑣𝑥 nie. Im
Gegensatz dazu verringert sich 𝑣𝑥 in jeder Sekunde um 9.8 m/s. (Das ist
𝑚
die Bedeutung einer Beschleunigung von 𝑎𝑦 = −9.8 2 =
𝑠
(−9.8 𝑚⁄𝑠) 𝑝𝑟𝑜 𝑆𝑒𝑘𝑢𝑛𝑑𝑒 ) Da gibt es nichts, was das Objekt entlang
der Bahn drücken würde. Während der Ball sich bewegt, ändert die nach
unten gerichtete Beschleunigung den Geschwindigkeitsvektor wie
gezeigt derart, dass er im Verlauf der Bewegung nach unten kippt. Am
Ende des Bogens, wenn der Ball auf derselben Höhe ist, von der er
gestartet ist, gilt 𝑣𝑦 = −19.6 𝑚/𝑠, also das Negative des Startwertes.
Der Ball beendet seine Bewegung nach unten mit genau demselben
Tempo, wie er nach oben gestartet ist, so wie wir es bereits beim
eindimensionalen freien Fall in Kapitel 2 gesehen haben.
Aus der Figur 3.32 können Sie entnehmen, dass ein schiefer Wurf
aus zwei unabhängigen Bewegungen zusammengesetzt ist: einer
gleichmässigen Bewegung mit konstanter Geschwindigkeit in
horizontaler Richtung und einem freien Fall in der vertikalen
Richtung. Die beiden Bewegungen sind unabhängig, aber da sie gleichzeitig stattfinden, müssen sie miteinander
analysiert werden, wie wir noch sehen.
In Kapitel 2 haben wir kinematische Gleichungen für Bewegungen mit konstanter Geschwindigkeit und
konstanter Beschleunigung gesehen. Diese Gleichungen können wir für den Fall hier anpassen. Die horizontale
Bewegung ist eine Bewegung mit konstanter Geschwindigkeit (𝑣𝑥 )𝑖 , und die vertikale Bewegung ist eine
gleichmässig beschleunigte Bewegung mit Anfangsgeschwindigkeit (𝑣𝑦 )𝑖 und einer Beschleunigung von 𝑎𝑦 = −𝑔.
03 Vektoren und Bewegung in 2 Dimensionen 22 / 28 22. Okt. 2022
Wir wollen nun alles, was wir bis anhin über den schiefen Wurf gelernt haben, einschliesslich der Gleichungen
aus Kapitel 2 zu horizontalen und vertikalen Bewegungen, zusammenfassen und vereinen. Wir werden diese
Informationen benutzen, um im nächsten Abschnitt damit Aufgaben zu lösen.
Synthese 3.1 Schiefer Wurf
Beim Schiefen Wurf sind die horizontale und die vertikale Komponente unabhängig voneinander, müssen aber
miteinander behandelt werden.
--------------------------------------------------------------------------------------------------------------------- ------
Halt-Moment-Mal 3.7 Ein 100 g schwerer Ball rollt über die Tischkante hinaus und landet 2 m vom
Tischbein entfernt. Ein 200 g schwerer Ball rollt über denselben Tisch mit derselben Geschwindigkeit. Wie weit weg
vom Tischbein landet er?
A. < 1m B. 1m C. zwischen 1m und 2m
D. 2m E. zwischen 2m und 4m F. 4m
---------------------------------------------------------------------------------------------------------------------------
Video Tutor Demo: https://mediaplayer.pearsoncmg.com/assets/secs-vtd05_howitzertunnel
Video Tutor Demo: https://mediaplayer.pearsoncmg.com/assets/secs-vtd06_howitzeraccelerated
3.7 Schiefer Wurf: Lösen von Aufgaben
Jetzt, wo wir eine gute Vorstellung davon haben, wie der schiefe Wurf funktioniert, können wir dieses Wissen
anwenden, um reale 2-dimensionale Bewegungsprobleme zu lösen.
Beispiel 3.11 Dock Jumping
Bei der Hundesportart Dock Jumping rennen Hunde
mit voller Geschwindigkeit über die Kante eines Pools
hinaus, die sich ein paar feet oberhalb eines
Wasserbecken befindet. Derjenige Hund gewinnt, der
am weitesten vom Dockrand entfernt landet. Wenn
ein Hund mit 8.5 m/s (einer typischen
Geschwindigkeit bei solchen Anlässen) über den Rand
0.61 m oberhalb des Wassers hinausrennt, wie weit
wird er kommen, bevor er ins Wasser platscht?
03 Vektoren und Bewegung in 2 Dimensionen 23 / 28 22. Okt. 2022
Vorbereiten Wir starten mit einem visuellen Überblick über die Situation in Figur 3.33. Den Nullpunkt des
Koordinatensystems haben wir am Fusse des Poolrands gelegt. Der Hund rennt horizontal über den Poolrand
hinaus, sodass die Anfangskomponenten der Geschwindigkeiten (𝑣𝑥 )𝑖 = 8.5 m⁄s und (𝑣𝑦 )𝑖 = 0 m⁄s. Wir
können das als einen schiefen Wurf behandeln, sodass wir die in der Synthese-Box 3.1 oben dargestellten
Einzelheiten und Gleichungen anwenden können.
Wir wissen, dass die horizontale und die vertikale Geschwindigkeit unabhängig voneinander sind. Die
Tatsache, dass der Hund Richtung Wasser fällt, hat keinen Einfluss auf seine horizontale Bewegung. Wenn der
Hund den Rand verlässt, wird er sich weiterhin horizontal mit 8.5 m/s bewegen. Die vertikale Bewegung ist ein
freier Fall. Der Sprung endet, wenn der Hund aufs Wasser auftrifft, das heisst, wenn er 0.61 m gefallen ist.
Lösen Wir starten damit, dass wir das Zeitintervall ∆𝑡 berechnen, also die Zeit, während der sich der Hund in
der Luft befindet. Diese Zeit ist bestimmt durch die vertikale Bewegung, ein freier Fall ist mit der
Anfangsgeschwindigkeit (𝑣𝑦 )𝑖 = 0 m⁄s. Zur Bestimmung des Zeitintervalls verwenden wir die vertikale
Positionsgleichung aus Synthese 3.1:
1
𝑦𝑓 = 𝑦𝑖 + (𝑣𝑦 )𝑖 ∆𝑡 − 𝑔(∆𝑡)2
2
1
0 m = 0.61 m + (0 m⁄𝑠 )∆𝑡 − (9.8 m⁄𝑠 2 ) (∆𝑡)2
2
Dies kann umgeformt und dann nach ∆t aufgelöst werden mit dem Resultat
∆𝑡 = 0.35 s
Das ist die Zeit, die der Hund in der vertikalen Bewegung benötigt, um das Wasser zu erreichen. Während
diesem Zeitintervall ist die horizontale Bewegung des Hundes eine gleichförmige Bewegung mit der
Anfangsgeschwindigkeit. Um herauszufinden, wie weit der Hund kommt, können wir die horizontale
Positionsgleichung mit der Anfangsgeschwindigkeit und dem Zeitintervall ∆𝑡 = 0.35 s anwenden. Das ergibt die
gesuchte Distanz:
𝑥𝑓 = 𝑥𝑖 + (𝑣𝑥 )𝑖 ∙ ∆𝑡 = 0 m + (8.5 m⁄𝑠 )(0.35 s) = 3.0 m
Der Hund trifft 3.0 m vom Poolrand entfernt aufs Wasser auf.
Lösen 3 m erscheint eine vernünftige Distanz für einen sehr schnell über einen 0.6m hohen Poolrand
hinausspringenden Hund. Tatsächlich ist dies eine typische Distanz für Hunde bei solchen Wettbewerben.
In Beispiel 3.11 rannte der Hund horizontal über den Poolrand hinaus. Viel grössere Weiten sind erreichbar, wenn
der Hund unter einem positiven Winkel zur Horizontalen über den Rand hinausspringt, was viel mehr Zeit in der
Luft ergibt. Ein Absprung unter einem Winkel bedeutet eine vertikale Anfangsgeschwindigkeit, aber das ist immer
noch ein Beispiel für einen schiefen Wurf, und die generelle Problemlösungsstrategie bleibt dieselbe.
Problemlösungs-
Strategie 3.1 Aufgaben zum Schiefen Wurf
Aufgaben zum Schiefen Wurf können wir lösen, indem wir die horizontale und vertikale Bewegung als eigene,
aber miteinander in Beziehung stehende Probleme lösen.
Vorbereiten Es sind einige Schritte, die Sie bei der Vorbereitung der Lösung einer Aufgabe zum schiefen
Wurf durchgehen sollten.
▪ Treffen Sie vereinfachende Annahmen. Egal ob es sich beim geworfenen Objekt um ein Auto oder einen
Basketball handelt, die Bewegung wird dieselbe sein.
▪ Zeichnen Sie einen visuellen Überblick, bei dem im Bild der Anfangspunkt und der Endpunkt der Bewegung
dargestellt sind.
▪ Führen Sie ein Koordinatensystem ein mit der x-Achse horizontal und der y-Achse vertikal. So wissen Sie, dass
die horizontale Beschleunigung 0 und die vertikale Beschleunigung die des freien Falls sein wird: 𝑎𝑥 = 0 und
𝑎𝑦 = −𝑔
▪ Definieren Sie Symbole und schreiben Sie eine Liste der gegebenen Werte. Definieren Sie, wonach in der
Aufgabe gefragt ist.
03 Vektoren und Bewegung in 2 Dimensionen 24 / 28 22. Okt. 2022
Lösen Es gibt zwei Sets von Bewegungsgleichungen für den schiefen Wurfs, eines für die horizontale
Geschwindigkeitskomponente und eines für die vertikale Geschwindigkeitskomponente:
Horizontal Vertikal
______________________________________________________________________________
1
𝑥𝑓 = 𝑥𝑖 + (𝑣𝑥 )𝑖 ∆𝑡 𝑦𝑓 = 𝑦𝑖 + (𝑣𝑦 )𝑖 ∆𝑡 − 𝑔(∆𝑡)2
2
(𝑣𝑥 )𝑓 = (𝑣𝑥 )𝑖 = konstant (𝑣𝑦 )𝑓 = (𝑣𝑦 )𝑖 − 𝑔∆𝑡
______________________________________________________________________________
Das Zeitintervall ∆𝒕 ist für die horizontale Bewegungskomponente dasselbe wie für die vertikale
Bewegungskomponente.
Finden Sie das Zeitintervall ∆𝑡 für die horizontale oder die vertikale Bewegungskomponente und benutzen Sie
dann diesen Wert, um die Lösung der anderen Komponente zu finden.
Bewerten Stellen Sie sicher, dass Ihr Resultat die richtigen Einheiten hat, vernünftig ist und die gestellte
Frage beantwortet.
Beispiel 3.12 Prüfen, ob ein Hollywood-Trick real sein könnte
Die Hauptdarsteller im Film Speed sind in einem Bus, der explodiert, sobald seine Geschwindigkeit unter 50 mph
fällt. Aber da gibt es ein Problem weiter vorne: bei einer Autobahnüberführung fehlt ein 50 feet langes Stück. Sie
entscheiden sich, mit dem Bus über diese Lücke zu springen. Die Strasse, die zu diesem Unterbruch hinaufführt,
hat einen Winkel von etwa 5°. Ein Blick auf den Tachometer gerade vor dem Sprung zeigt, dass der Bus mit 67
mph fährt. Der Bus schafft den Sprung und überlebt. Ist das realistisch oder nur Film-Fiktion?
Vorbereiten Wir beginnen damit, dass wir
Geschwindigkeiten und Distanzen in SI Einheiten
umrechnen. Die Anfangsgeschwindigkeit ist 𝑣𝑖 =
30 m/s und die Lücke hat eine Länge von 𝐿 = 15 m.
Gemäss der Problem-Lösungs-Strategie machen wir
als nächste Schritte eine Skizze, den in Figur 3.34
gezeigten visuellen Überblick und eine Liste mit den
Werten.
Bei der Wahl unserer Achsen haben wir den Ursprung
dorthin gelegt, wo der Bus seinen Sprung beginnt. Der
Vektor der Anfangsgeschwindigkeit zeigt 5° über die
Horizontale, sodass sich für die
Anfangsgeschwindigkeiten folgende Komponenten
ergeben:
(𝑣𝑥 )𝑖 = 𝑣𝑖 cos 𝜃 = (30 m⁄s) (cos 5°) = 30 m⁄s
(𝑣𝑦 )𝑖 = 𝑣𝑖 sin 𝜃 = (30 m⁄s) (sin 5°) = 2.6 m⁄s
Was definieren wir als den Endpunkt der Aufgabe? Indem wir 𝑦𝑓 = 0 m setzen, suchen wir nach der horizontalen
Distanz 𝑥𝑓 , nach welcher der Bus wieder auf seine Anfangshöhe zurückgekehrt ist. Wenn 𝑥𝑓 mehr als 15 m
beträgt, überwindet der Bus die Lücke erfolgreich. Wir haben unser Diagramm optimistisch gezeichnet in der
Annahme, dass es dem Bus gelingt, aber…
Lösen Problem-Lösungs-Strategie 3.1 empfiehlt, eine Komponente der Bewegung zu benutzen, um das
Zeitintervall ∆𝑡 zu bestimmen. Wir beginnen mit der vertikalen Geschwindigkeit. Die Bewegungsgleichung für
die vertikale Position lautet
1
𝑦𝑓 = 𝑦𝑖 + (𝑣𝑦 )𝑖 ∆𝑡 − 𝑔(∆𝑡)2
2
Wir wissen, dass gilt 𝑦𝑓 = 𝑦𝑖 = 0 m. Wenn wir ∆𝑡 ausklammern, erhalten wir für die Positionsgleichung
1
0 = ∆𝑡((𝑣𝑦 )𝑖 − 𝑔∆𝑡)
2
Eine Lösung dieser Gleichung ist ∆𝑡 = 0 s. Das ist eine zulässige Lösung, aber sie entspricht dem Zeitpunkt zu
Beginn der Flugbahn, wo 𝑦 = 0 gilt. Wir suchen nach der zweiten Lösung für 𝑦 = 0 am Ende der Bahn, das
erreicht ist, wenn gilt
03 Vektoren und Bewegung in 2 Dimensionen 25 / 28 22. Okt. 2022
1 1
0 = (𝑣𝑦 )𝑖 − 𝑔∆𝑡 = (2.6 m⁄s) − 2(9.8 m⁄s2 )∆𝑡
2
Daraus ergibt sich
2 ∗ (2.6 m⁄s)
∆𝑡 = = 0.53 s
9.8 m⁄s2
Während der Bus sich 0.53 s lang vertikal bewegt, bewegt er sich auch horizontal. Die horizontale Endposition
ist gegeben durch 𝑥𝑓 = 𝑥𝑖 + (𝑣𝑥 )𝑖 ∆𝑡, oder
𝑥𝑓 = 0 m + (30 m⁄s)(0.53 s) = 16 m
So weit hat sich der Bus horizontal bewegt, wenn er wieder auf seine ursprüngliche Höhe zurückgekehrt ist. 16 m
ist ein wenig mehr als die Breite der Lücke, sodass ein Bus, der mit der gegebenen Geschwindigkeit über eine 5°
Rampe fährt, es schaffen würde, ganz knapp zwar!
Beurteilen Wir können unsere Rechnerei kurz prüfen, indem wir beachten, dass der Bus auf derselben
Höhe landet, wie er gestartet ist. Das bedeutet, wie wir in Figur 3.32b gesehen haben, dass die y-Geschwindigkeit
bei der Landung das Negative seines Startwertes sein sollte. Wir können die Geschwindigkeitsgleichung für die
vertikale Komponente der Bewegung dazu benutzen, um den Endwert zu berechnen und wir sehen, dass er der
Vorhersage entspricht:
(𝑣𝑦 )𝑓 = (𝑣𝑦 )𝑖 − 𝑔∆𝑡
= (2.6 m⁄s) − (9.8 m⁄s2 )(0.53 s) = − 2.6 m⁄s
Während den Filmaufnahmen liess die Filmcrew tatsächlich einen Bus über die Lücke in einer Überführung
springen! Der tatsächliche Sprung war ein bisschen komplizierter als in unserem Beispiel, weil ein realer Bus, der
als ein ausgedehntes Objekt mehr ist als eine Punktmasse, zu rotieren beginnt, sobald die Front über die Rampe
hinauskommt. Der tatsächliche Stunt-Sprung benutzte eine extra Rampe, um dem Vorderteil des Buses einen
Schub zu geben. Nichtsdestotrotz zeigt unser Beispiel, dass die Filmmacher ihre Aufgaben erledigt haben und
eine Situation entwarfen, in der die Physik korrekt war.
Die Reichweite eines Wurfkörpers
Wenn ein Football-Spieler den Ball das Feld hinunterwirft, wieweit wird er fliegen? Was wird die Reichweite, die
horizontal zurückgelegte Strecke, für diesen spezifischen schiefen Wurf sein?
Beispiel 3.12 war eine Reichweitenaufgabe: Bei gegebenem Tempo und gegebenem Winkel wollten wir wissen,
wie weit der Bus fliegen wird. Das Tempo und der Winkel sind die zwei Variablen, welche die Reichweite
bestimmen. Höheres Tempo bedeutet selbstverständlich grössere Reichweite. Aber wie kommt der Winkel mit ins
Spiel?
Figur 3.35 zeigt die Flugbahnen eines mit 100 m/s abgeschossenen
Geschosses für unterschiedliche Abwurfwinkel. Bei sehr kleinen oder sehr
grossen Winkeln ist die Reichweite recht gering. Wenn Sie einen Ball unter
einem 75° Winkel werfen, wird er eine beträchtliche Auf- und Abbewegung
vollführen, aber er wird kaum eine horizontale Strecke zurücklegen. Wenn Sie
einen Ball unter 15° werfen, wird der Ball nicht genügend lange in der Luft
bleiben, um sehr weit zu kommen. Diese beiden Fälle haben dieselbe
Reichweite, wie Figur 3.35 zeigt.
Ist der Winkel zu klein oder zu gross, ist die Reichweite kürzer als sie
sein könnte. Der «gerade richtige» Fall, der die maximale Reichweite ergibt,
wenn auf derselben Höhe gelandet wird wie der Abwurf stattgefunden hat,
ergibt sich bei einem Abwurfwinkel von 45°, wie Figur 3.35 zeigt.
Für wirkliche Objekte wie Golfbälle und andere Bälle, kann der optimale
Winkel wegen dem Luftwiderstand weniger als 45° sein. Bis anhin haben wir den Luftwiderstand vernachlässigt, aber
für kleine, mit hoher Geschwindigkeit fliegende Objekte ist der Luftwiderstand kritisch. Aerodynamische Kräfte
kommen ins Spiel und bewirken, dass die Flugbahn des Projektils von einer Parabel abweicht. Ein Golfball erreicht
seine maximale Reichweite bei einem Winkel von weniger als 45°, was Sie
zweifelslos wissen, wenn Sie jemals Golf gespielt haben.
Ein weiter Weitsprung Ein 45°-Winkel ergibt für ein Geschoss die grösste Reichweite. Weshalb
denn springen Weitspringer unter einem viel flacheren Winkel ab? Zwei der Annahmen, die zum
45° Winkel für die optimale Reichweite führten, gelten hier nicht. Der Athlet ändert die Lage
seiner Beine in der Luft; er landet nicht in derselben Höhe, von der er abgesprungen ist. Und
ebenso können Athleten nicht dasselbe Absprungtempo für unterschiedliche Winkel erreichen;
Sie können bei kleineren Winkeln mit höherem Tempo abspringen. Der Vorteil des schnelleren
Absprungtempos überwiegt den Effekt des geringeren Winkels.
03 Vektoren und Bewegung in 2 Dimensionen 26 / 28 22. Okt. 2022
------------------------------------------------------------------------------------------------------------------------- --------------
Halt-Moment-Mal 3.8 Ein Baseball Spieler trainiert das
Schlagen. Er trifft zwei aufeinanderfolgende Würfe unter
unterschiedlichen Winkeln, aber mit genau demselben Tempo. Ball 1 und
Ball 2 beschreiben die dargestellten Flugbahnen. Welcher Ball ist länger
in der Luft? Luftwiderstand kann bei dieser Aufgabe vernachlässigt
werden.
A. Ball 1 B. Ball 2
C. beide Bälle sind gleichlange in der Luft
------------------------------------------------------------------------------------------------------------------------- --------------
3.8 Bewegung in zwei Dimensionen: Kreisbewegung
Es mag merkwürdig erscheinen, dass ein Objekt, das sich mit konstantem Tempo bewegt, beschleunigt sein kann,
aber das ist genau das, was mit einem Objekt in gleichmässiger kreisförmiger Bewegung geschieht. Es ist
beschleunigt, weil es die Richtung seiner Bewegung laufend ändert. Was ist die Beschleunigung in diesem Fall? Wir
haben im Abschnitt 3.2 gesehen, dass bei einer Kreisbewegung mit
konstantem Tempo der Beschleunigungsvektor 𝒂 ⃗⃗ ins Zentrum des
Kreises hin zeigt. Es lohnt sich, diese Idee nochmals durchzugehen.
Wie Sie in Figur 3.36 sehen können, ist die Geschwindigkeit immer
tangential zum Kreis, sodass 𝑣⃗ und 𝑎⃗ in allen Punkten auf dem Kreis
zueinander senkrecht sind.
Eine Beschleunigung, die dauernd ins Zentrum des Kreises zeigt,
wird Zentripetalbeschleunigung genannt. Das Wort «zentripetal»
stammt aus dem Griechischen und bedeutet «das Zentrum suchend».
Beachte ► Zentripetalbeschleunigung ist nicht eine neue
Art von Beschleunigung. Alles was wir tun, ist nichts anderes als der
Beschleunigung bei einer bestimmten Art Bewegung einen Namen zu
geben. Der Betrag der Zentripetalbeschleunigung ist konstant, weil
alle der aufeinanderfolgenden Geschwindigkeitsänderungen Δ𝑣⃗ im
Geschwindigkeitsdiagramm dieselbe Länge haben. ◄
Um unsere Beschreibung der Kreisbewegung zu vervollständigen, müssen wir eine quantitative Beziehung
zwischen dem Betrag der Beschleunigung 𝑎 und der Geschwindigkeit 𝑣 finden. Wir wollen zum Fall des Riesenrads
zurückkehren. Während der Zeit Δ𝑡, in der sich eine Kabine auf dem Kreis von Punkt 1 zu Punkt 2 bewegt, legt die
Kabine einen Winkel 𝜃 zurück und vollführt eine Verschiebung 𝑑⃗, wie in Figur 3.37 gezeigt. Wir haben einen relativ
grossen Winkel 𝜃 für unsere Zeichnung gewählt, damit die Winkelbeziehungen klar ersichtlich sind, aber für einen
kleinen Winkel ist die Verschiebung im Wesentlichen gleich wie die zurückgelegte Distanz, und diese Näherung
werden wir machen.
Figur 3.37 zeigt, wie die Geschwindigkeit sich ändert, während die Kabine sich
bewegt, und Figur 3.37c zeigt die Vektorberechnung für die Änderung in der
Geschwindigkeit. Das Dreieck, das für diese Berechnung benutzt wird, ist geometrisch
ähnlich zu demjenigen, welches die Verschiebung zeigt, wie in Figur 3.37c dargestellt.
03 Vektoren und Bewegung in 2 Dimensionen 27 / 28 22. Okt. 2022
Das ist eine Schlüsselinformation: Sie erinnern sich von der Geometrie her, dass ähnlichen Dreiecke gleiche
Verhältnisse ihrer Seiten haben, sodass wir schreiben können:
∆𝑣 𝑑
= (3.22)
𝑣 𝑟
wobei ∆𝑣 der Betrag des Vektors der Geschwindigkeitsänderung ∆𝑣⃗ ist. Die Geschwindigkeit 𝑣 zur Bezeichnung der
Länge einer Seite des ersten Dreiecks haben wir ohne Index geschrieben, weil diese Länge dieselbe ist für die
Geschwindigkeiten 𝑣⃗1 und 𝑣⃗2 .
Jetzt sind wir bereit, die Beschleunigung zu berechnen. Die Verschiebung ist gerade die Geschwindigkeit 𝑣 mal
das Zeitintervall Δ𝑡, sodass wir schreiben können
𝑑 = 𝑣∆𝑡
Dies können wir für 𝑑 in Gleichung 3.22 einsetzen und erhalten so
∆𝑣 𝑣∆𝑡
𝑣
= 𝑟
was umgeformt werden kann zu
∆𝑣 𝑣2
∆𝑡
= 𝑟
Wir erkennen, dass die linke Seite der Gleichung die Beschleunigung ist, sodass dies geschrieben werden kann als
𝑣2
𝑎= 𝑟
Wenn wir diesen Betrag kombinieren mit der Richtung, die wir oben erwähnt haben, können wir die
Zentripetalbeschleunigung schreiben als
𝑣2
𝑎⃗ = (
𝑟
, 𝑖𝑛 𝑅𝑖𝑐ℎ𝑡𝑢𝑛𝑔 𝑧𝑢𝑚 𝐾𝑟𝑒𝑖𝑠𝑧𝑒𝑛𝑡𝑟𝑢𝑚 ) (3.23)
Zentripetalbeschleunigung eines Objekts, das sich auf einem Kreis mit Radius r und Tempo v bewegt
.
03 Vektoren und Bewegung in 2 Dimensionen 28 / 28 22. Okt. 2022
Das könnte Ihnen auch gefallen
- ETHZ SRT Posten LösungenDokument21 SeitenETHZ SRT Posten LösungenLiridon1804Noch keine Bewertungen
- Vektoranalysis IDokument16 SeitenVektoranalysis IHannes MichaelisNoch keine Bewertungen
- Starke Abi Prüfung Physik 2022Dokument37 SeitenStarke Abi Prüfung Physik 2022huss eldNoch keine Bewertungen
- MATHEMATIK ABITUR Zusammenfassung1 5Dokument19 SeitenMATHEMATIK ABITUR Zusammenfassung1 5o_oezkan100% (2)
- (AB) - Vektoren in Der PhysikDokument4 Seiten(AB) - Vektoren in Der Physikel pabstNoch keine Bewertungen
- Vektor (2)Dokument4 SeitenVektor (2)AkbarSenoPriaji -SamaNoch keine Bewertungen
- Jetzt lerne ich analytische Geometrie für die Oberstufe: www.alles-Mathe.deVon EverandJetzt lerne ich analytische Geometrie für die Oberstufe: www.alles-Mathe.deNoch keine Bewertungen
- Dynamik V1 PDFDokument31 SeitenDynamik V1 PDF1234567890joseNoch keine Bewertungen
- MechanikDokument13 SeitenMechanikMichael BernartzNoch keine Bewertungen
- VectoresDokument3 SeitenVectoreshecyary ferrerNoch keine Bewertungen
- Skript Für Klassen Mechanik Freier Fall Zusammengesetzte Bewegung Wuerfe 12-12-22Dokument11 SeitenSkript Für Klassen Mechanik Freier Fall Zusammengesetzte Bewegung Wuerfe 12-12-22Emilio WirthenstätterNoch keine Bewertungen
- Schiefe RinneDokument5 SeitenSchiefe RinnemarthcasNoch keine Bewertungen
- Skript - Parameterdarstellungen - Polarkoordinaten Und Komplexe Zahlen 2Dokument39 SeitenSkript - Parameterdarstellungen - Polarkoordinaten Und Komplexe Zahlen 2mahdiehNoch keine Bewertungen
- Vektorgeometrie Skipt KolnDokument125 SeitenVektorgeometrie Skipt KolnNicolasNoch keine Bewertungen
- Übungsaufgaben - KinematikDokument7 SeitenÜbungsaufgaben - KinematikLucas PruessnerNoch keine Bewertungen
- Kapitel 3 AufgabenDokument4 SeitenKapitel 3 AufgabenAlejandra GiraldoNoch keine Bewertungen
- 07 Freier Fall Mond - Videoanalyse LSGDokument7 Seiten07 Freier Fall Mond - Videoanalyse LSGjuol.wiensNoch keine Bewertungen
- AF2 Funktionsgraphen InterpretierenDokument5 SeitenAF2 Funktionsgraphen InterpretierenTamila BabaevaNoch keine Bewertungen
- Physik 10Dokument13 SeitenPhysik 10ayNoch keine Bewertungen
- 040 Resultierende KräfteDokument3 Seiten040 Resultierende KräfteFabian ReuterNoch keine Bewertungen
- Physics QuestionsDokument2 SeitenPhysics QuestionsSomto NNoch keine Bewertungen
- Bewegung Geschwindigkeit Und BeschleunigungDokument6 SeitenBewegung Geschwindigkeit Und BeschleunigunggoulielmNoch keine Bewertungen
- FSP - Physik M KursDokument4 SeitenFSP - Physik M Kursshayeste.khodadadNoch keine Bewertungen
- Kinematik ADokument67 SeitenKinematik ADivyant RajNoch keine Bewertungen
- PhysikalischeGrundlagen Mechanik EmbacherDokument22 SeitenPhysikalischeGrundlagen Mechanik EmbacherEslem DridiiNoch keine Bewertungen
- Vektoranalysis IIDokument12 SeitenVektoranalysis IIHannes MichaelisNoch keine Bewertungen
- Zusammenfassung (Physik - Wellen)Dokument4 SeitenZusammenfassung (Physik - Wellen)Land MannNoch keine Bewertungen
- Kinematik! Bewegungen Erster Und Zweiter OrdnungDokument2 SeitenKinematik! Bewegungen Erster Und Zweiter OrdnungTill HardenbickerNoch keine Bewertungen
- Vektor AnalysisDokument136 SeitenVektor Analysishuss eldNoch keine Bewertungen
- 2 1 Geschwindigkeit Teil1Dokument35 Seiten2 1 Geschwindigkeit Teil1Asmir ImsirovicNoch keine Bewertungen
- 2015 - Teil B - LoesungenDokument7 Seiten2015 - Teil B - LoesungenDeah AlisNoch keine Bewertungen
- Einführung in Die Vektorgeometrie Und Lineare AlgebraDokument104 SeitenEinführung in Die Vektorgeometrie Und Lineare AlgebraNoshaba CheemaNoch keine Bewertungen
- FSP Physik T KursDokument8 SeitenFSP Physik T KursNgọc NghĩaNoch keine Bewertungen
- Exp1 ws2020 Ueb02 STUDDokument2 SeitenExp1 ws2020 Ueb02 STUDP ZNoch keine Bewertungen
- Geraden und Ebenen im Raum: Klartext für NichtmathematikerVon EverandGeraden und Ebenen im Raum: Klartext für NichtmathematikerNoch keine Bewertungen
- RotationskörperDokument4 SeitenRotationskörperJanina Jes. WerleNoch keine Bewertungen
- VektorenDokument2 SeitenVektorenkokamej479Noch keine Bewertungen
- GK Lernzusammenfassung VektorenDokument19 SeitenGK Lernzusammenfassung Vektorenшадыа оьап жэтблол MationsNoch keine Bewertungen
- Venustransit PhotosmL 1Dokument25 SeitenVenustransit PhotosmL 1ip5141.3Noch keine Bewertungen
- MechanikDokument55 SeitenMechanikFares AouamNoch keine Bewertungen
- Kocsányi Problems in Phisyk 1-2Dokument37 SeitenKocsányi Problems in Phisyk 1-2arkathNoch keine Bewertungen
- Editable WorksheetsDokument11 SeitenEditable WorksheetsfelamendoNoch keine Bewertungen
- Taller Fisica II TraducidoDokument5 SeitenTaller Fisica II Traducidojsebas635Noch keine Bewertungen
- M12 ChecklisteGeo12 EbenenGeraden LukStamm 1718Dokument1 SeiteM12 ChecklisteGeo12 EbenenGeraden LukStamm 1718Arian SimonNoch keine Bewertungen
- Geometrie Der Relatività TstheorieDokument318 SeitenGeometrie Der Relatività TstheorieklausNoch keine Bewertungen
- AB2 - Lösung - Mechanik - Die Gleichförmige BewegungDokument3 SeitenAB2 - Lösung - Mechanik - Die Gleichförmige Bewegunglunalizeth.linaresNoch keine Bewertungen
- Versuch M1Dokument11 SeitenVersuch M1business.ahmadialiNoch keine Bewertungen
- Forschungspraktikum PDFDokument52 SeitenForschungspraktikum PDFkaizhen shiNoch keine Bewertungen
- Aufgabe HammerwerferDokument1 SeiteAufgabe HammerwerferAMAN DENNYNoch keine Bewertungen
- RelativitätstheorieDokument172 SeitenRelativitätstheorieugwatNoch keine Bewertungen
- PhysikDokument37 SeitenPhysikchairyl maulaNoch keine Bewertungen
- Exp1 ws2020 Ueb01 STUDDokument2 SeitenExp1 ws2020 Ueb01 STUDP ZNoch keine Bewertungen
- Ph1-Uebung 11Dokument2 SeitenPh1-Uebung 11Mambo JamboNoch keine Bewertungen
- Was Ist Eine Ableitung?Dokument7 SeitenWas Ist Eine Ableitung?Gregory StodolskyNoch keine Bewertungen