Das könnte Ihnen auch gefallen
- 2030 - Anleitung - Operating Instructions - ManuelDokument76 Seiten2030 - Anleitung - Operating Instructions - ManuelNeryNoch keine Bewertungen
- MVS Beschreibung 7488Dokument68 SeitenMVS Beschreibung 7488Ermelino MatarazzoNoch keine Bewertungen
- Faq 01012Dokument42 SeitenFaq 01012Chico AlbrechtNoch keine Bewertungen
- pvr6 PříručkaDokument80 Seitenpvr6 PříručkaJortonNoch keine Bewertungen
- Spez KR C1 06 enDokument22 SeitenSpez KR C1 06 enafonsomoutinhoNoch keine Bewertungen
- 2722020Dokument20 Seiten2722020RicardoNoch keine Bewertungen
- Wabco - Atc 006-007Dokument20 SeitenWabco - Atc 006-007Nicu Terciu100% (1)
- Siemens B1023 Norma MP14Dokument42 SeitenSiemens B1023 Norma MP14A A Asdasd DfNoch keine Bewertungen
- Spez KR C1 07 enDokument29 SeitenSpez KR C1 07 enafonsomoutinhoNoch keine Bewertungen
- Martin ME 411 - Service AnleitungDokument97 SeitenMartin ME 411 - Service AnleitungjoseaselopezNoch keine Bewertungen
- Soft Starter EcostartDokument32 SeitenSoft Starter Ecostartkaks6063Noch keine Bewertungen
- 42,0410,0921Dokument40 Seiten42,0410,0921TymoteoNoch keine Bewertungen
- LMK4 AnlDokument28 SeitenLMK4 AnlMeister DrumlogNoch keine Bewertungen
- BA Frequenzregelgerät OCS 902.000810 (DE)Dokument40 SeitenBA Frequenzregelgerät OCS 902.000810 (DE)Andrii MaalerNoch keine Bewertungen
- Aneitung Von MOD 3 15KTL3 XDokument32 SeitenAneitung Von MOD 3 15KTL3 Xmfreude1Noch keine Bewertungen
- Volvo Tuning Sebcon41 - HandbuchDokument24 SeitenVolvo Tuning Sebcon41 - HandbuchHans ImGlückNoch keine Bewertungen
- Handbuch EasyBus LichtanlagenDokument40 SeitenHandbuch EasyBus LichtanlagenThomas VögelinNoch keine Bewertungen
- Frquenzumrichter Baureihe FDS 3-GenerationDokument38 SeitenFrquenzumrichter Baureihe FDS 3-GenerationOgnjen BanjacNoch keine Bewertungen
- VT Ba Esk2001 PDFDokument84 SeitenVT Ba Esk2001 PDFhexapodo2Noch keine Bewertungen
- PSD02 Controller PDFDokument96 SeitenPSD02 Controller PDFFredrik0% (1)
- Bedienungsanleitung SR4 Komplett de 2016Dokument54 SeitenBedienungsanleitung SR4 Komplett de 2016Markus MüllerNoch keine Bewertungen
- 02977432Dokument82 Seiten02977432Михаил БогдановNoch keine Bewertungen
- PA 2000 v602Dokument32 SeitenPA 2000 v602AdamNoch keine Bewertungen
- Rob 3000 42 - 0410 - 0777Dokument58 SeitenRob 3000 42 - 0410 - 0777Woody Darlington100% (1)
- ELTERM1 Beschreibung D DIT004Dokument22 SeitenELTERM1 Beschreibung D DIT004Mauricio Schmidt MunizNoch keine Bewertungen
- Cam-120 10 Man deDokument12 SeitenCam-120 10 Man deIbrahim AwadNoch keine Bewertungen
- Instruction Manual-BG 65 SI Motor With Integrated Speed ControllerDokument36 SeitenInstruction Manual-BG 65 SI Motor With Integrated Speed ControllermiratuquecosaNoch keine Bewertungen
- Bax 4647 deDokument51 SeitenBax 4647 dePedro GutmanNoch keine Bewertungen
- VCB400 BetriebsanleitungTeil2Dokument129 SeitenVCB400 BetriebsanleitungTeil2Felipe Ferreira100% (1)
- DMU 50 Evolution Magazin Promatek Service ManualDokument49 SeitenDMU 50 Evolution Magazin Promatek Service Manualmik.svistNoch keine Bewertungen
- Kimo - LetromikSD2Dokument32 SeitenKimo - LetromikSD2urp30234Noch keine Bewertungen
- Haidenhain 135 InstallationDokument79 SeitenHaidenhain 135 Installationlipeng828Noch keine Bewertungen
- 7 - Steuerungs - Und KontrollsystemDokument18 Seiten7 - Steuerungs - Und KontrollsystemНеша Даца АндрићNoch keine Bewertungen
- Janitza BHB Umg96s2 de PDFDokument66 SeitenJanitza BHB Umg96s2 de PDFStefan BusoiNoch keine Bewertungen
- 123Dokument64 Seiten123Никола КаришикNoch keine Bewertungen
- Volkswagen SSP 249 - VW Passat W8 Motronic ME711 2001 - deDokument52 SeitenVolkswagen SSP 249 - VW Passat W8 Motronic ME711 2001 - deHenrique CorreiaNoch keine Bewertungen
- SC 2Dokument18 SeitenSC 2Hernando AlejandroNoch keine Bewertungen
- KR C1 A - KUKA RoboticsDokument30 SeitenKR C1 A - KUKA RoboticsSuleymen MeymouniNoch keine Bewertungen
- De KeystartDokument27 SeitenDe KeystartAnonymous RcxX0FcNoch keine Bewertungen
- Da40ms-2 deDokument32 SeitenDa40ms-2 desanjith bugwandeenNoch keine Bewertungen
- Bedienungsanleitung Motorsteuerung Storm NeuDokument23 SeitenBedienungsanleitung Motorsteuerung Storm NeuLevani ChubinidzeNoch keine Bewertungen
- CR Monitoring: Grundfos InstructionsDokument40 SeitenCR Monitoring: Grundfos Instructionschandras20Noch keine Bewertungen
- tcd1044 Thruster ControllerDokument56 Seitentcd1044 Thruster ControllerTomeo GarciaNoch keine Bewertungen
- Man-S23451x.03 (Ted)Dokument52 SeitenMan-S23451x.03 (Ted)willsoleNoch keine Bewertungen
- 42F5 10 2014 PDFDokument32 Seiten42F5 10 2014 PDFDiego Nicolas Izeta GenovaNoch keine Bewertungen
- FRAKO rm2106 - 2112 - Ba - DTDokument32 SeitenFRAKO rm2106 - 2112 - Ba - DTJose EspinozaNoch keine Bewertungen
- Versi BrakeDokument34 SeitenVersi BrakeMichaelNoch keine Bewertungen
- Talento Smart B10 Ins MultiDokument172 SeitenTalento Smart B10 Ins MultiJonathan CalvoNoch keine Bewertungen
- Handboek Handbuch: Gebruikersprogramma PSD-CONTROL 2.x Anwenderprogramm PSD-CONTROL 2.xDokument132 SeitenHandboek Handbuch: Gebruikersprogramma PSD-CONTROL 2.x Anwenderprogramm PSD-CONTROL 2.xTrungNoch keine Bewertungen
- Naal Inbetriebnahme 8200 VectorDokument7 SeitenNaal Inbetriebnahme 8200 VectorThomas KirschNoch keine Bewertungen
- Dac Re 3581 SeriesDokument25 SeitenDac Re 3581 SeriesleandroNoch keine Bewertungen
- 1207A Manual PDFDokument65 Seiten1207A Manual PDFNILTON MORNoch keine Bewertungen
- Manual 3ap2fi-550kvDokument124 SeitenManual 3ap2fi-550kvThái SalemNoch keine Bewertungen
- 10564306Dokument120 Seiten10564306barretimufuNoch keine Bewertungen
- Martin ME 401 - Service ManualDokument137 SeitenMartin ME 401 - Service ManualZoubir AouagNoch keine Bewertungen
- Manual Controlador KRIWANDokument36 SeitenManual Controlador KRIWAN26566Noch keine Bewertungen
- Liste E01 06 D GBDokument8 SeitenListe E01 06 D GBRodrigo GonçalvesNoch keine Bewertungen
- Modellbau-Fernsteuerungsanlagen: richtig programmieren, umrüsten und einsetzenVon EverandModellbau-Fernsteuerungsanlagen: richtig programmieren, umrüsten und einsetzenNoch keine Bewertungen
- Pronto 4 DCDokument130 SeitenPronto 4 DCRadu BarbaNoch keine Bewertungen
- Solarwatt M220-60 Get Ak PDFDokument2 SeitenSolarwatt M220-60 Get Ak PDFIssa TraoreNoch keine Bewertungen
- BWB - 602215 Bis 602224 - 340933 - BalDokument4 SeitenBWB - 602215 Bis 602224 - 340933 - BalGyörgy MurvaiNoch keine Bewertungen
- Installations-Und Betriebsanleitung: Manualslib - deDokument37 SeitenInstallations-Und Betriebsanleitung: Manualslib - demihadNoch keine Bewertungen
- PK 60000Dokument183 SeitenPK 60000Camilo Guzman100% (1)
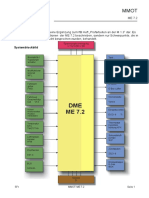
- DME ME 7.2: Spannungsversorgung U 15/ U30 U 50Dokument1 SeiteDME ME 7.2: Spannungsversorgung U 15/ U30 U 50PAPINHO JRNoch keine Bewertungen
- Ultra Excellent Stand 11.2007 PDFDokument137 SeitenUltra Excellent Stand 11.2007 PDFmaraNoch keine Bewertungen
- Versuch 1 GrundlagenDokument22 SeitenVersuch 1 GrundlagenRaed AmroNoch keine Bewertungen
- 5 PDFDokument1 Seite5 PDFΗλίας ΔρυστέλλαςNoch keine Bewertungen
- Aspirator GorenjeDokument96 SeitenAspirator GorenjeBojan BjelajacNoch keine Bewertungen