Das könnte Ihnen auch gefallen
- Symmetrie VL 2019 Teil3Dokument27 SeitenSymmetrie VL 2019 Teil3KonstantinNoch keine Bewertungen
- Trabant Electronic Ignition SystemsDokument10 SeitenTrabant Electronic Ignition SystemsbalazsprojectsNoch keine Bewertungen
- 5 Zustandsraumdarstellung Und SignalflussdiagrammeDokument8 Seiten5 Zustandsraumdarstellung Und SignalflussdiagrammeMax EberleinNoch keine Bewertungen
- Zusammenfassung Abitur ITGDokument56 SeitenZusammenfassung Abitur ITGyukis593750% (2)
- Petrinetze 2Dokument10 SeitenPetrinetze 2Eldar SultanowNoch keine Bewertungen
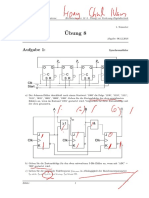
- U8 PDFDokument5 SeitenU8 PDFHong Chul NamNoch keine Bewertungen
- UE1 Aufgabe LFS GPK WS0910Dokument4 SeitenUE1 Aufgabe LFS GPK WS0910mm8819Noch keine Bewertungen
- Datenblatt EHZ363WADokument2 SeitenDatenblatt EHZ363WASchorschNoch keine Bewertungen
- 0 Wiederholung Mechatronische Systeme 1Dokument3 Seiten0 Wiederholung Mechatronische Systeme 1Max EberleinNoch keine Bewertungen
- Aufgabe 4Dokument3 SeitenAufgabe 4api-19803170Noch keine Bewertungen
- Klausur: Digitaltechnik I (TI2B) Vom 06. Februar 2004Dokument4 SeitenKlausur: Digitaltechnik I (TI2B) Vom 06. Februar 2004salNoch keine Bewertungen
- Err 2Dokument8 SeitenErr 2Micaela EspinozaNoch keine Bewertungen
- MatheformelnDokument4 SeitenMatheformelntim MatheisNoch keine Bewertungen
- Num QuizesDokument9 SeitenNum QuizesItani MulliNoch keine Bewertungen
- 01 UebungDokument3 Seiten01 Uebungdenis beckerNoch keine Bewertungen
- A Two Phase Induction Motor Variable Speed DriveDokument15 SeitenA Two Phase Induction Motor Variable Speed Drivesvk_ntNoch keine Bewertungen
- Bomba Bosh Aky005 - 12Dokument72 SeitenBomba Bosh Aky005 - 12Anonymous 80HAPYsoNoch keine Bewertungen
- Script Zur Einführung in Die Grundlagen Der FehlerrechnungDokument6 SeitenScript Zur Einführung in Die Grundlagen Der FehlerrechnungSimon PetersNoch keine Bewertungen
- ThyristorenDokument14 SeitenThyristorenanton99Noch keine Bewertungen
- Or Zusammenstellung Von Definitionen Und Formeln Als Hilfsmittel in Der Klausur - AM - WNDokument14 SeitenOr Zusammenstellung Von Definitionen Und Formeln Als Hilfsmittel in Der Klausur - AM - WNasdfasdfasdfNoch keine Bewertungen
- BA BLR CM deDokument8 SeitenBA BLR CM deLeonel FloresNoch keine Bewertungen
- bs2 Skript Kapitel 6.3Dokument4 Seitenbs2 Skript Kapitel 6.3Rainer BrainNoch keine Bewertungen
- Zusammenfassung Regelungstechnik KomplettDokument34 SeitenZusammenfassung Regelungstechnik KomplettDombo komboNoch keine Bewertungen
- WiringDokument2 SeitenWiringstuart smythNoch keine Bewertungen
- ZusFass TÜ4 - STDokument6 SeitenZusFass TÜ4 - STnettezuzuNoch keine Bewertungen
- 5AHMBA AUT S Entwurfsprinzipien Von SteuerungenDokument15 Seiten5AHMBA AUT S Entwurfsprinzipien Von SteuerungenGelbStich HDNoch keine Bewertungen
- Aufgaben Lösungen V2.1Dokument98 SeitenAufgaben Lösungen V2.1ReichardtNoch keine Bewertungen
- Oekonometrie 8Dokument25 SeitenOekonometrie 8wobax54592Noch keine Bewertungen
- 04 RA SchaltnetzeDokument44 Seiten04 RA SchaltnetzeAhmad AlbawNoch keine Bewertungen
- Lösung ST1Dokument5 SeitenLösung ST1anas slatyNoch keine Bewertungen
- U9 PDFDokument9 SeitenU9 PDFHong Chul NamNoch keine Bewertungen
- Kapitel 4.3 Elementsteifigkeitsmatrizen Und ElementlastvektorenDokument26 SeitenKapitel 4.3 Elementsteifigkeitsmatrizen Und ElementlastvektorenRainer BrainNoch keine Bewertungen
- 2 Ue2 PDFDokument2 Seiten2 Ue2 PDFHoàngg MinhhNoch keine Bewertungen
- Baustatik II Formelsammlung NeuDokument24 SeitenBaustatik II Formelsammlung Neualexander.haritonov94Noch keine Bewertungen
- Lenze Keypad EMZ9371BC XT PDFDokument188 SeitenLenze Keypad EMZ9371BC XT PDFLalit yadavNoch keine Bewertungen
- Radio Beta 1990 InstruccionesDokument13 SeitenRadio Beta 1990 Instruccionesred wolffishNoch keine Bewertungen
- VL6 Kapitel3 Teil1 WS21 22Dokument84 SeitenVL6 Kapitel3 Teil1 WS21 22zzgNoch keine Bewertungen
- DC Lasttrennschalter 27012021Dokument24 SeitenDC Lasttrennschalter 27012021taba ahmedNoch keine Bewertungen
- TM - Vorlesung - 5Dokument16 SeitenTM - Vorlesung - 5Ozan ÖzyamanNoch keine Bewertungen
- Willkommen Zur Vorlesung Baustatik III: Bachelor Studiengang Bauingenieurwesen Modul 18: Statik Und Tragwerkslehre BDokument14 SeitenWillkommen Zur Vorlesung Baustatik III: Bachelor Studiengang Bauingenieurwesen Modul 18: Statik Und Tragwerkslehre BQusai DiabNoch keine Bewertungen
- Serie 4Dokument2 SeitenSerie 4superveneinceNoch keine Bewertungen
- lexsolar-BioEnergy Ready-To-Go - Teacher's Manual PDFDokument60 Seitenlexsolar-BioEnergy Ready-To-Go - Teacher's Manual PDFAhmad MehribanliNoch keine Bewertungen
- Logik Folienohne AussagenDokument14 SeitenLogik Folienohne AussagenAhmet AgaNoch keine Bewertungen
- M Pin: 11.10 KeilwellenverbindungDokument2 SeitenM Pin: 11.10 KeilwellenverbindungEva WalknerNoch keine Bewertungen
- TM - Vorlesung - 6Dokument11 SeitenTM - Vorlesung - 6Ozan ÖzyamanNoch keine Bewertungen
- Instructions Workstation CastorsDokument8 SeitenInstructions Workstation CastorsHanna HorváthNoch keine Bewertungen
- DrehzahlDokument10 SeitenDrehzahlMiha KuharNoch keine Bewertungen
- PLT1 005-BasisautomatisierungUebungmitLoesungDokument21 SeitenPLT1 005-BasisautomatisierungUebungmitLoesungmarklmendozaNoch keine Bewertungen
- Grundlegende SchaltungenDokument23 SeitenGrundlegende Schaltungengoodsweater100% (1)
- ZZ DL Probetest 01 SUS P2-LogicDokument1 SeiteZZ DL Probetest 01 SUS P2-Logicjanet.ahadyarNoch keine Bewertungen
- lexsolar-BioEnergy Ready-To-Go - Operating Manual PDFDokument39 Seitenlexsolar-BioEnergy Ready-To-Go - Operating Manual PDFAhmad MehribanliNoch keine Bewertungen
- Lösungen Der Übungsaufgaben I: Mathematik Für Die Ersten Semester (2. Auflage)Dokument8 SeitenLösungen Der Übungsaufgaben I: Mathematik Für Die Ersten Semester (2. Auflage)joeNoch keine Bewertungen
- FormelsammlungDokument4 SeitenFormelsammlungChrist IanNoch keine Bewertungen
- Grundig VS630 Service ModeDokument2 SeitenGrundig VS630 Service ModeBugs BunnyNoch keine Bewertungen
- ET2 - Schaltvorgänge (16.04.2014)Dokument41 SeitenET2 - Schaltvorgänge (16.04.2014)vavahop468Noch keine Bewertungen
- Schmidt, Zeitz - 1981 - Grenzübergang Beobachter-DifferenziererDokument5 SeitenSchmidt, Zeitz - 1981 - Grenzübergang Beobachter-DifferenziererPew TheBIindNoch keine Bewertungen
- Bootstrap-Verfahren bei der Berechnung von Prognosen in (G)ARCH-Modellen: Möglichkeiten und Grenzen des Verfahrens bei der Bestimmung der Verteilungs- und Intervallprognose der Renditen und Renditevolatilität sowie bei der Berechnung von Value-at-RiskVon EverandBootstrap-Verfahren bei der Berechnung von Prognosen in (G)ARCH-Modellen: Möglichkeiten und Grenzen des Verfahrens bei der Bestimmung der Verteilungs- und Intervallprognose der Renditen und Renditevolatilität sowie bei der Berechnung von Value-at-RiskNoch keine Bewertungen