Beruflich Dokumente
Kultur Dokumente
PRT Skript WS 06 07 Kap 1 Kap 2
Hochgeladen von
earl-e-birdOriginaltitel
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
PRT Skript WS 06 07 Kap 1 Kap 2
Hochgeladen von
earl-e-birdCopyright:
Verfügbare Formate
1.1.
D er Begriff Prozessrechentechnik 1
1. Einführung
1.1. Der Begriff Prozessrechentechnik
Laut Norm (IEV 351-18-3A) ist ein Prozessrechner ein Rechner, der direkt mit einem (meist physikalischen)
Prozess über Prozessschnittstellen zum Echtzeitdatenaustausch gekoppelt ist. Bild 1 zeigt das allgemeine Prinzip
eines Prozessrechners.
Bild 1: Allgemeines Prinzip eines Prozessrechners
1.2. Ziele der Vorlesung
Nach Bild 1 sind bei einem allgemeinen Prozessrechner analoge und digitale Ein- und Ausgänge und z.B.
zusätzliche Schnittstellen für eine Anbindung an Busysteme vorhanden. Im Rahmen dieser Vorlesung soll der
Prozessrechner schwerpunktmäßig als digitaler Regler genutzt werden. Ziel dabei ist, den Rechenalgorithmus nach
Bild 1 theoretisch und praktisch zu verwirklichen, um den Prozess aus Informationen seiner Zustands- und
Führungsgrößen, die ggf. A/D-gewandelt werden, über einen D/A-W andler durch analoge Stellgrößen zu beein-
flussen.
Kenntnisse über Hard- und Software von Rechnern sind aus mehreren Veranstaltungen vorhanden und in der
Vorlesung Prozesssteuerung I [1] wird W issen über Echtzeitdatenverarbeitung mit Standardrechnern vermittelt.
Deshalb wird in dieser Vorlesung nicht auf Hardware von Datenverarbeitungsanlagen und Schnittstellen eingegan-
gen.
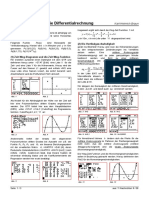
1.3. Unterschied analog/kontinuierlich zu digital/zeitdiskret
Beispiel für analoges System
Lineare analoge kontinuierliche Systeme sind u.a. bekannt aus den Vorlesungen Regelungstechnik, Grundlagen der
Elektrotechnik 3 oder Mathematik 3 (DGL dafür). Basis der Berechnung von dynamischen Systemen sind dabei
Differentialgleichungen (DGLn). Als Beispiel soll für Bild 2 die DGL aufgestellt werden:
(1)
(2)
oder als Laplace-Transformierte
(3) Bild 2: Beispiel für ein
kontinuierliches System
oder als Übertragungsfunktion
(4)
Ein kontinuierliches dynamisches System wird entweder durch eine DGL (im Zeitbereich oder Lapalace-Bereich)
oder als Übertragungsfunktion in p beschrieben.
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
2 1. Einführung
Diskretes Systeme
In einem diskreten System werden dessen Prozessgrößen entweder nur zu definierten, meist periodisch mit einer
Zeitdauer, der Abtastdauer, auftretenden Zeitpunkten betrachtet (zeitdiskret) oder die Prozessgrößen besitzen einen
diskreten, nicht reellen W ertebereich (wertediskret). Die Periodendauer, also das Zeitraster, in dem der Vorgang
seinen W ert ändert, heißt die Abtastdauer T. Für diesen Zeitraum werden die Größen des Prozesses (des Systems)
meist als konstant angenommen oder sie sind konstant. W ie später (Abschnitt 3.6) gezeigt wird, können auch
analoge Systeme diskret beschrieben werden.
Beispiel für ein diskretes System im nichttechnischen Bereich
Ein nichttechnisches Beispiel aus dem Bereich der diskreten Prozesse ist die Zinsrechnung. Ein Sparer zahlt am
Beginn eines jeden Jahres i den Betrag/Einsatz E(i) ein. Das Kapital K wird mit dem Zinssatz e verzinst. Am
Beginn des nächsten Jahres i+1 hat er somit das Kapital
K(i+1) = K(i) + K(i)*e+ E(i+1) (5)
welches sich aus altem Kapital K(i), Zinsen plus Spareinsatz ergibt. Nach Umformung erhält man
K(i+1) - (1+ e)*K(i) = E(i+1). (6)
Auf der linken Seite steht die Prozessgröße „Kapital“ als Differenz, auf der rechten Seite die Anregung, die
Eingangsgröße „Einsatz“. In Anlehnung an lineare DGLn [z:B (2)] mit konstanten Koeffizienten wird Gleichung
(6) eine lineare Differenzengleichung mit konstanten Koeffizienten genannt. Da in (6) nur eine Differenz zweier
W erte auftritt, ist (6) eine Differenzengleichung 1. Ordnung.
Nach (3) und (4) werden kontinuierliche Systeme Laplace transformiert mit der Laplace Variablen p. W ie später in
Kapitel 3 gezeigt wird, erfolgt für Differenzengleichung en eine z-Transformation und die Übertragungsfunktion
ergibt sich in z anstatt in p.
Kontinuierliche Systeme, die durch DGLn gegeben sind, können z.B. für die Behandlung in Abtastregelungen
näherungsweise durch Differenzengleichungen beschrieben werden, siehe Abschnitt 3.6. Die Eingangsgrößen der
kontinuierlichen Systeme sind analoge Signale. Für deren Verarbeitung im Prozessrechner eingelesen müssen diese
Signale diskretisiert werden, siehe Abschnitt 3.1.
1.4. Unterschied zwischen analogen und diskreten Regelungen
Die Struktur eines analogen Regelkreises ist u.a. aus der Vorlesung Regelungstechnik [2] bekannt, siehe Bild 3:
Bild 3: W irkungsplan eines analogen Standardregelkreises
In Bild 3 bedeuten: c - Zielgröße
w - Führungsgröße
e - Regeldifferenz, Regelfehler
m - Reglerausgangsgröße (Eingangsgröße Stelleinrichtung)
y - Stellgröße (Ausgangsgröße Steller, Eingangsgröße Steller)
x - Regelgröße
r - Rückführgröße
q - Aufgabengröße
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
1.5. Inhalt der Vorlesung 3
Die Regelung mit einem digitalen Regler ist der analogen Struktur nach Bild 3 ähnlich. Unterschiede:
1. Der Regelalgorithmus erfolgt digital.
2. Beim analogen Regler hat jeder Signalzeitpunkt Bedeutung für die Berechnung der analogen Stellgröße. Der
digitale Regler arbeitet taktweise in den Zeitabständen der Abtastzeit T (Rechnertaktzeit).
3. Soll- und Istwerte müssen diskretesiert werden. D.h für den Bereich einer Abtastzeit T werden Soll- und
Istwerte als konstant angenommen. Der Begriff Taster in Bild 4 bedeutet somit, dass aus dem M esssignal
x(t) die diskreten W erte
x(t=0) = x 0
x(t=T) = x 1
x(t=2T) = x 2
....
gebildet werden müssen.
4. Der Sollwert für die Regelung kann entweder analog oder digital vorgegeben werden. Bei analogen
Vorgaben ist dieser zu diskretisieren.
Bild 4: Möglicher W irkungsplan einer Abtastregelung
1.5. Inhalt der Vorlesung
In Kapitel 2 werden einige Grundlagen der Vorlesung Regelungstechnik [2] kurz zusammengefasst, die in spätere
Abschnitten der Prozessrechentechnik benötigt werden. Kapitel 2 dient somit den Studierenden zur Überprüfung
ihrer Vorkenntnisse und es wird empfohlen, den Stoff aus Kapitel 2 zu wiederholen, damit Unklarheiten in der
Vorlesung beseitigt werden können. Einige neue Abschnitte aus Kap. 2 werden bei Bedarf erläutert und deren
Theorie in den Kapiteln ab 3 anschließend angewandt.
Kapitel 3 beschäftigt sich mit der Theorie von Abtastregelungen. Hier werden diskrete Regelalgorithmen (siehe
Bild 4) beschrieben. Ein weiteres wichtiges Thema ist die Beschreibung von Taster und Speicher (siehe Bild 4),
später Abtasthalteglied genannt. Aufbauend auf bekannte analoge Reglerentwurfsverfahren ([1], bzw. Kap. 2) wird
die Umsetzung von analog ermittelten Reglerkennwerten in Parameterwerte für digitale Regelalgorithmen dar-
gestellt. Zur Beschreibung der diskreten Systeme (u.a. digitaler diskreter Regler) werden allgemein Differenzenglei-
chungen und z-Transformation benutzt. Diese Beschreibungsformen werden hier vorgestellt.
In Kapitel 4 erfolgt eine Vertiefung des in Kap. 3 vermittelten Stoffes durch Anwendung der Theorie anhand
zweier einfacher Systeme:
S Abschnitt 4.1: Diskrete Regelung einer PT1-Strecke mit einem I-Regler
S Abschnitt 4.2: Diskrete Regelung einer PT2-Strecke mit einem PI-Regler
Ziel ist es (auch in der parallelverlaufenden Laborveranstaltung), die Theorie der Abtastregelungen anhand eines
praktischen Beispiels zu erläutern. Grundlage bilden dabei die in Kapitel 5 dargestellte Modellbildung und analoge
Regelung eines Antriebs mit Gleichstrommotor. Vermittlung von Theorie und Erläuterung einer zugehörigen
Regelung für Drehzahl und Lage erfolgen in Kapitel 6.
In Kapitel 7 erfolgt die Beschreibung von DGLn höherer Ordnung (n $ 2) mit Hilfe der Zustandesraumtheorie, die
dann vom Kontinuierlichen auf die diskrete Zustandsraumtheorie erweitert wird.
Abschließend wird in Kapitel 8 die Regelung von zeitdiskreten Systemen mit Digitalreglern beschrieben. Dabei
erfolgt die Reglersynthese in z, also im Diskreten.
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
4 2. W iederholung analoge Theorie
2. Wiederholung analoge Theorie
2.1. Formeln zur Laplace-Transformation
In diesem Abschnitt werden die wichtigsten Formel der Laplace-Transformation wiederholt. Ausführliche Herlei-
tung der angegeben Formel erfolgen u.a. in [3] bis [5]. Es sei darauf hingewiesen, dass für die Symbole der
Laplacevariablen sowohl „p“ als auch „s“ benutzt werden können.
2.1.1. Laplace-Transformation
Zeit-Bereich => Frequenz-Bereich oder Bildbereich
Y(p) = £{y(t)} Y(p) M-------F y(t) (7)
2.1.2. Rücktransformation
Frequenz-Bereich => Zeit-Bereich
y(t) = £ -1{Y(p)} y(t) F-------M Y(p) (8)
Anmerkung: Zeitgrößen klein y(t) Frequenzgrößen, Bildbereichsgrößengroß Y(p)
Sowohl die Laplace-Transformation (Abschnitt 2.1.1) als auch deren Rücktransformation (Abschnitt 2.1.2) werden
in der Praxis mit Hilfe von Tabellen (siehe Abschnitt 2.1.4) und Partialbruchzerlegung (siehe u.a.[3] bis [5])
durchgeführt.
2.1.3. Transformation von y und dessen Ableitung
y(t) F-------M Y(p) (9)
F-------M p*Y(p) - y0 (10)
F-------M (11)
F-------M (12)
F-------M (13)
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
2.1. Form eln zur Laplace-Transform ation 5
2.1.4. Transformation und Rücktransformation mit Tabelle
y(t) Y(p) Nummer
1 = e(t) (14)
t = t*e(t) = r(t) (15)
e -at (16)
cos(w1t) (17)
sin(w1t) (18)
1 - e -t/T (19)
1 - e -at (20)
t*e -at (21)
e -at*cos(w1t) (22)
e -at*sin(w1t) (23)
cos(w1t +j) (24)
e -at*cos(w1t + j) (25)
(26)
Tabelle 1: Korrespondenztabelle der Laplace-Transformation
2.1.5. Verschiebungssatz
Bild 5
£ T0 > 0 (27)
Eine Verschiebung von y(t) um T 0 in Richtung der Zeitachse bewirkt im Bildbereich eine Multiplikation mit
Anmerkung: Die Verschiebung im Zeitbereich kann physikalisch als Totzeit (Laufzeit) gedeutet werden.
Beispiel: Förderband, Signallaufzeit. D aher erscheinen physikalisch sinnvoll nur Totzeiten (Laufzeiten)
größer Null, welches eine Verschiebung nach rechts bedeutet.
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
6 2. W iederholung analoge Theorie
2.1.6. Dämpfungssatz
gegeben: y(t) Y(p)
gesucht: £{y(t)*e -at}
Lösung: £{y(t)*e -at} = Y(p+a)
y(t)*e -at F---M Y(p+a) (28)
2.1.7. Faltungsintegral
Das Faltungsintegrals verknüpft zwei gegebene Funktionen y 1(t) und y 2(t) mit Hilfe der Definition
(29)
zu einer dritten Funktion. Die Aussage des Faltungsintegrals soll nun anschaulich verdeutlicht werden, siehe Bild
6. Die von der Variablen t abhängigen Funktionen y 1(t) und y 2(t) werden überführt in von der Variablen ô abhängi-
gen Funktionen. Bei der Funktion y1(t) wird “t” nur durch “ô” ersetzt:
y 1(t) ÿ y 1(ô)
In der Funktion y 2(t) wird “t” ersetzt durch “t-ô”:
y 2(t) ÿ y 2(t-ô)
Die Funktion y2 wird somit verschoben und gespiegelt. Die Funktion y2 ist somit im Vergleich zur Funktion y1 um
den Parameter “t” gefaltet. Sowohl y1(t) als auch y2(t-ô) sind Funktionen, die von der Variablen ô abhängig sind.
Die Zeit t ist in der Funktion y2 nur noch als konstanter Parameter anzusehen, siehe Bild 6, Teilbild b.
Bild 6: Anschauliche Bedeutung des Faltungsintegrals
Das Integral (29) kann für einen bestimmten (im Moment konstanten) Zeitpunkt t gedeutet werden. Die Integration
erfolgt über ô, t ist nur konstanter Parameter für das Integral. Um das Faltungsintegral (29) für einen t-W ert zu
bestimmen, müssen die zwei in Bild 6b darstellten Funktionen multipliziert und integriert werden. Die Integration
erfolgt von ô = 0 bis ô = t. Das Ergebnis wird durch die obere Integrationsgrenze wieder eine Funktion von t. Ohne
Beweis: Die Funktionen y 1 und y 2 dürfen auch getauscht werden, ohne dass sich das Ergebnis ändert.
2.1.8. Faltungssatz
y 1(t) F---M Y 1(p)
y 2(t) F---M Y 2(p)
Y(p) = Y 1(p)*Y 2(p) (30)
Fazit: Die Transformation des Faltungsintegrals zw eier Funktionen ergibt die M ultiplikation der
Laplace-Transformierten der Einzelfunktionen.
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
2.2. D er ideale Einheitsstoß und die Einheitssprungfunktion 7
2.1.9. Grenzwertsätze
(31)
(32)
2.2. Der ideale Einheitsstoß und die Einheitssprungfunktion
2.2.1. Definition des idealen Einheitsstoßes
Anderer Name: Dirac-Impuls, Diracsche Funktion, Impulsfunktion der Fläche „1"
Die spezielle Impulsfunktion Dirac-Impuls d(t) ist definiert durch folgende Eigenschaften:
- nur bei t = 0 von Null verschieden,
- Amplitude unendlich,
- Breite infinitesimal klein,
- Impulsfläche A = 1.
Anschaulich darstellen lässt sich der Impuls entweder durch ein Rechteck oder durch eine e-Funktion der Fläche 1.
2.2.2. Beschreibung des Impulses mit Hilfe von e-Funktionen und Grenzübergang
=> =>
Bild 7 verdeutlicht den Einfluss von kleineren ô. Bei kleiner werdenden ô steigt die Amplitude und die Impulsform
wird deutlicher.
Bild 7:
Grenzübergang von ô gegen Null ergibt:
(33)
Laplace-Transformieren von d(t)
£{d(t)} = £ £*
£{d(t)} = 1 d(t) F------M 1 (34)
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
8 2. W iederholung analoge Theorie
2.2.3. Beschreibung des idealen Einheitsstoßes mit Hilfe von Rechtecken und Grenz-
übergang
Bild 8 zeigt Rechtecke mit der Fläche 1.
Bild 8: Impulsfunktion Diriac-Impuls erklärt anhand von
Rechtecken der Fläche 1
(35)
Laplace-Transformieren von d(t)
£{d(t)} = £ £
d(t) F------M 1
Praktische Anwendung von Impulsfunktionen (ideale Einheitsstöße, multipliziert mit
Fläche ungleich eins) :
- Einschalten einer idealen Spannungsquelle an C,
- Kraftstoß in der Mechanik ,
- Impulsantwort in der Regelungstechnik.
2.2.4. Die Einheitssprungfunktion
Bild 9: Einheitssprungfunktion
Der Einheitssprung e(t) nach Bild 9 ist definiert als:
u(t) = 0 für t < 0
u(t) = 1 für t > 0 (36)
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
2.3. Beschreibung von linearen System 9
2.2.5. Zusammenhang zwischen Einheitssprung und Dirac-Impuls
Der Einheitssprung (36) lässt sich mit Hilfe des Grenzwertes auch als eine Funktion angeben:
(37)
Differenzieren von (37) ergibt:
(38)
Der Vergleich von (38) und (33) lässt erkennen
(39)
dass die zeitliche Ableitung des Einheitssprunges e(t) die Gewichtsfunktion d(t) ist.
2.3. Beschreibung von linearen System
2.3.1. Beschreibung durch Differentialgleichungen (DGLn)
Für die dynamische Beschreibung von Systemen benutzt man DGLn. Für ein System n. Ordnung nach Bild 10
ergibt sich für die Ausgangsgröße v die folgende DGL:
(40)
In der Regel sind in (40) mehrere b i gleich Null.
Bild 10: System n. Ordnung mit u als Eingangs- und v als Ausgangs-
größe
2.3.2. Beschreibung durch die Übertragungsfunktion
Mit v(t=0) ergibt sich z.B. unter Anwendung von (9) bis (13) auf (40) für ein System 4. Ordnung :
V(p)[a 4*p 4 + a 3*p 3 + a 2*p 2 + a 1*p + a 0] = U(p)[b 3*p 3 + b 2*p 2 + b 1*p + b 0] (41)
Die Übertragungsfunktion eines Systems wird definiert als das Verhältnis der Laplace-transformierten Zeit-
funktionen von Ausgangs- zu Eingangsgröße:
(42)
Für das System nach Bild 10 ergibt sich durch Anwendung von (42) auf (41) die Übertragungsfunktion.
(43)
2.3.3. Impulsantwort/Gewichtsfunktion
W ird auf das System nach Bild 10 auf den Eingang der Einheitsimpuls nach Abschnitt 2.2 (33) gegeben
u(t) = d(t) (Idealer Einheitsstoß) (44)
antwortet das System mit der speziellen Impulsantwort, der Gewichtsfunktion
v(t) = g(t) (Gewichtsfunktion) (45)
Einsetzen von (44) und (45) unter Anwendung von (34) in (42) ergibt:
G(p) = £{g(t)} (46)
Die Laplace-Transformierte der Gewichtsfunktion ist die Übertragungsfunktion.
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
10 2. W iederholung analoge Theorie
2.3.4. Sprungantwort/Übergangsfunktion
W ird auf das System nach Bild 10 auf den Eingang der Einheitssprung nach Abschnitt 2.2.4 (36) gegeben
u(t) = e(t) (Einheitssprung) (47)
antwortet das System mit der speziellen Sprungantwort, genannt Übergangsfunktion:
v(t) = h(t) (Übergangsfunktion) (48)
Einsetzen von (47) und (48) unter Anwendung von (14) in (42) ergibt:
H(p) = £{h(t)} (49)
2.3.5. Zusammenhang Übergangsfunktion h(t) und Gewichtsfunktion g(t)
Die Gleichung (39) aus Abschnitt 2.2.4 besagt, dass die Ableitung des Einheitssprunges e(t) der Dirac-Impuls d(t)
ist. Bei linearen Systemen lässt sich dieses auf die Antwort übertragen. Damit ist die Gewichtsfunktion g(t) die
Ableitung der Übergangsfunktion h(t):
(50)
2.3.6. Berechnung der Systemantwort bei beliebiger Anregung mit Hilfe der und Ge-
wichtsfunktion
Das Eingangssignal u(t) des Systems nach Bild 10 wird für einen infinitesimal kleinen Zeitraum dt zur Zeit t
betrachtet, siehe Bild 11.
Bild 11: Beliebiges Anregungssignal eines Systems
Der in Bild 11 schraffierte Teil des Signals u(ô) kann angesehen werden als ein Teilimpuls der Fläche
u(t) d t (51)
der zum Zeitpunkt t erfolgt. Die Teilantwort des Systems auf den Teilimpuls (51) lautet:
dv = g(t-t)*u(t) dt (52)
Zur Berechnung von v(t) muss (52) über t integriert werden:
(53)
Nach (53) lasst sich die Systemantwort mit Hilfe des Faltungsintegrals, siehe (29), berechnen.
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
2.4. Ü bertragungsfunktionen elem entarer Ü bertragungsglieder 11
2.4. Übertragungsfunktionen elementarer Übertragungsglieder
Diese Übertragungsglieder wurden sehr ausführlich in [2] behandelt, siehe dort. Die Darstellungen hier erleichtert
die W iederholung des Stoffes.
2.4.1. Proportionalglied, P-Glied, P-Regelglied
Blocksymbol Übergangsfunktion Bodediagramm
F = 20dB*ln(K p)
h(t) = K p*e(t) (54)
DGL/Gleichung
v = K p*u (55)
Gewichtsfunktion
g(t) = K p*d(t) (56)
Übertragungsfunktion
G(p) = K p (57)
Tabelle 2: Proportionalglied, P-Glied, P-Regelglied, K p Proportionalbeiwert
2.4.2. Integrierglied, I-Glied, I-Regelglied
Blocksymbol Übergangsfunktion Bodediagramm
h(t) = t/T I (58)
DGL/Gleichung
(59)
(59)
Gewichtsfunktion
(60)
(61)
(60)
Steigung in F
-20 dB/Dekade
Übertragungsfunktion
(62)
Tabelle 3: Integrierglied, I-Glied, I-Regelglied, K I - Integrierbeiwert, T I=1/K I - Integrierzeit
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
12 2. W iederholung analoge Theorie
2.4.3. Verzögerungsglied 1. Ordnung, PT1-Glied
Blocksymbol Übergangsfunktion Bodediagramm
F Max = 20*lg(K P)
h(t) = K p*(1- e -t/T) (63)
DGL/Gleichung
(64)
(65)
Gewichtsfunktion
(66)
Übertragungsfunktion
Steigung für F (wT >> 1)
-20 dB/Dekade
(67)
Tabelle 4: Verzögerungsglied 1. Ordnung, PT1-Glied
2.4.4. Reales Differenzierglied mit Verzögerung 1. Ordnung, DT1-Glied
Blocksymbol Übergangsfunktion Bodediagramm
DGL/Gleichung
Gewichtsfunktion
Übertragungsfunktion
Tabelle 5: Reales Differenzierglied mit Verzögerung 1. Ordnung, DT1-Glied
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
2.4. Ü bertragungsfunktionen elem entarer Ü bertragungsglieder 13
2.4.5. Verzögerungsglied 2. Ordnung, PT2-Glied, nicht schwingungsfähig
Blocksymbol Übergangsfunktion
(68)
Bodediagramm
DGL/Gleichung
(69)
(70) Gewichtsfunktion
(71) (72)
Übertragungsfunktion F m = 20*lg(K P)
(73)
(74)
Tabelle 6: Verzögerungsglied 2. Ordnung, PT2-Glied, nicht schwingungsfähig (J >1)
2.4.6. Verzögerungsglied 2. Ordnung, PT2-Glied, schwingungsfähig
Blocksymbol Übergangsfunktion
(75)
DGL/Gleichung Bodediagramm
(76)
(77)
Gewichtsfunktion
(78) (79)
Übertragungsfunktion
F m = 20*lg(K P)
(80)
Tabelle 7: Verzögerungsglied 2. Ordnung, PT2-Glied, schwingungsfähig (J < 1)
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
14 2. W iederholung analoge Theorie
2.4.7. PI-Regelglied
Blocksymbol Übergangsfunktion Bodediagramm
(81)
DGL/Gleichung
(82)
v=x + K P*u (83)
Übertragungsfunktion Gewichtsfunktion
(84) (88)
F m = 20*lg(K P)
(85)
(86)
(87)
Tabelle 8: PI-Regelglied K I = K P/T i =
1/ T I
2.4.8. PIDT1-Regler
Blocksymbol Übergangsfunktion Bodediagramm
DGL/Gleichung
Gewichtsfunktion
Übertragungsfunktion
Tabelle 9: PIDT1-Regler
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
2.5. Reglerdim ensionierungsverfahren 15
2.5. Reglerdimensionierungsverfahren
2.5.1. Ersatzübertragungsfunktion
Im allgemeinen sind die zu regelnden Strecken dynamische Systeme höherer Ordnung. Um für diese Strecken
Regler zu entwerfen, erfolgt i.A. eine Vereinfachung der Strecke. Dieses ist mit einer Verringerung der Ordnung
verbunden. Vereinfachen, bzw. die Strecke beschreiben, kann man entweder mit Hilfe
- der Übertragungsfunktion oder des Frequenzgangs (Abschnitt 2.5.1.1)
- oder mit Hilfe der Sprungantwort/Übergangsfunktion (Abschnitt 2.5.1.3)
2.5.1.1. Vereinfachung der Übertragungsfunktion
Das allgemeine System n-ter Ordnung
(89)
lässt sich mit Hilfe von Reihenentwicklungen annähern durch ein System 2. Ordnung als PDT2-Glied
(90)
oder einfacher als PT2-Glied
oder durch ein System 1. Ordnung
(91)
Die Näherungen (90) und (91) können später für einen Reglerentwurf genutzt werden. Bei Näherungen ist immer
auf den Gültigkeitsbereich zu achten. Dieses soll am Beispiel gezeigt werden. Die Übertragungsfunktion
(92)
wird mit Hilfe von (90) und (91) angenähert:
(93)
(94)
Zum Vergleich sind (92), (93) und (94) in einem Bodedia-
gramm dargestellt. Bild 12 zeigt, dass im unterem Frequenz-
bereich (ù < 1/9 s) die Näherung mit den PT1-Glied (93) noch
gute Ergebnisse liefert. Die Näherung mit den PT2-Glied (94)
zeigt noch für etwas größere Frequenzen eine gute Näherung.
Bild 12: Bodediagramm, Einfluss der Näherung
a) Originalfunktion (PT3)
b) Näherung PT2
c) Näherung PT1
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
16 2. W iederholung analoge Theorie
2.5.1.2. Ersatzübertragungsfunktion des Totzeitgliedes
Das Totzeitglied mit der Übertragungsfunktion in p
(95)
wird in eine Reihe entwickelt:
und nach den ersten Glied abgebrochen:
(96)
Nach (96) kann ein Totzeitglied mit der Laufzeit T t in erster Näherung durch ein PT1-Glied mit Ersatzzeitkon-
stanten T t an genähert werden.
2.5.1.3. Überführung der Sprungantwort/Übergangsfunktion in eine Übertragungsfunktion
Bei vielen Systemen kann man eine Sprungantwort/Übergangsfunktion aufnehmen und aus dieser eine Ersatzüber-
tragungsfunktion herleiten. Als Ersatzübertragungsfunktionen werden im allgemeinen verwendet:
- PT1-Glied (Abschnitt 2.5.1.3.1)
- PT2-Glied nicht schwingungsfähig, J > 1 (Abschnitt 2.5.1.3.2)
- PT2-Glied leicht schwingungsfähig, 0.6 < J < 1 (Abschnitt 2.5.1.3.3)
- PT2-Glied stark schwingungsfähig, J < 0.6 (Abschnitt 2.5.1.3.4)
- Totzeitglied
- oder eine Kombination oberer Näherungen.
Das Totzeitglied ist leicht aus der Sprungantwort zu beschreiben und soll hier nicht behandelt werden.
2.5.1.3.1. PT1-Glied
Verläuft die Übergangsfunktion in der Form nach Bild 13, kann diese durch ein PT1-Glied mit der Zeitkonstanten
T e und der Verstärkung K Pe angenähert werden:
(97)
Die W erte K Pe und T e können aus Bild 13 abgelesen werden.
Bild 13: Annäherung der Ü bergangsfunktion durch ein
PT1-Glied hier: K Pe = 6, T e = 40 ms
2.5.1.3.2. PT2-Glied nicht schwingungsfähig
Verläuft die Übergangsfunktion in der Form nach Bild 14, kann diese durch ein PT2-Glied, (siehe (73)/(74)) mit
den Zeitkonstanten T e1 und T e2 sowie der Verstärkung K Pe angenähert werden:
(98)
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
2.5. Reglerdim ensionierungsverfahren 17
Bild 14: Annäherung der Übergangsfunktion
durch ein PT2-Glied, J >1
Die Ersatzverstärkung K Pe kann aus Bild 14, aus dem Endwert direkt abgelesen werden. Die Ersatzzeitkonstanten
T e1 und T e2 werden mit Hilfe der zwei Zeiten T 01 und T 08 (siehe Bild 14) identifiziert. Die beiden Zeiten geben die
Stellen an, bei denen die Übergangsfunktion 0.1 und 0.8 vom Endwert erreicht haben. Aus dem Verhältnis T 01 und
T 08 werden nach Bild 15 die W erte T 1/T 08 und T 2/T 08 abgelesen.
Bild 15: Zeitkonstante T e1 und T e2 eines PT2-Gliedes (J > 1) als Funktion vom Verhältnis T 01/T 08
Für die Ersatzzeitkonstanten T e1 und T e2 aus (301) erhält man
T e1 = (T 1/T 08)*T 08 = a*T 08
(99)
T e2 = (T 2/T 08)*T 08 = b*T 08
wobei sich T 1/T 08 und T 2/T 08 aus Bild 15 ergeben; T 08 wird aus der Übergangsfunktion (Bild 14) abgelesen.
Hinweis: Dieses Verfahren kann nur bei Systemen ohne Totzeit angewendet werden.
Beispiel:
Für die Übergangsfunktion nach Bild 14 lassen sich ablesen:
T 01 = 1.2 s T 08 = 7.2 s K Pe = 10
Das Verhältnis wird berechnet:
T 01/T 08 = 1.2 s/7.2 s = 0.167
Aus Bild 15 kann abgelesen werden:
a = T 1/T 08 = 0.21
b = T 2/T 08 = 0.46
Die Ersatzzeitkonstanten ergeben sich dann zu:
T e1 = 0.21*7.2 s = 1.5 s
T e2 = 0.46*7.2 s = 3.3 s
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
18 2. W iederholung analoge Theorie
2.5.1.3.3. PT2-Glied, leicht schwingungsfähig
Bild 16: Annäherung der Übergangsfunktion durch
ein PT2-Glied, 0.6 < J < 1
Verläuft die Übergangsfunktion nach Bild 16, kann diese durch ein PT2-Glied nach (80) angenähert werden:
(100)
Die Ersatzverstärkung K Pe kann nach Bild 16 aus dem Endwert direkt abgelesen werden. Da die Übergangsfunktion
aus Bild 16 stärk gedämpft ist, kann der Überschwingungsgrad schlecht ermittelt werden. Deshalb werden wie in
Abschnitt 2.5.1.3.2 die Zeiten T 01 und T 08 ermittelt, an denen die Übergangsfunktion 0.1 bzw. 0.8 des Endwertes
erreicht. Aus dem Verhältnis der Zeiten T 01/T 08 werden aus Bild 17 die Kenngrößen ablesen:
- J
- (101)
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
2.5. Reglerdim ensionierungsverfahren 19
Bild 17: Kenngrößen eines schwingungsfähigen PT2-Gliedes aus dem Verhältnis der Zeiten T 01/T 08
a) Dämpfung J
b) w0, bezogen auf T 08
Beispiel:
Aus der Übergangsfunktion nach Bild 16 lassen sich ablesen:
K Pe = 10 T 01 = 0.747 T 08 = 3.870 s
Das Verhältnis wird berechnet:
T 01/T 08 = 0747 s/3.870 s = 0.193.
Damit kann aus Bild 17 abgelesen werden:
J = 0.9 wo*T 08 = 2.7
Berechnung von w0 ergibt nach (101):
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
20 2. W iederholung analoge Theorie
2.5.1.3.4. PT2-Glied stark schwingungsfähig
Verläuft die Übergangsfunktion in der Form nach Bild 18, kann diese auch durch ein PT2-Glied nach (100)
angenähert werden. Die Ersatzverstärkung K Pe kann auch hier aus den Endwert der Übergangsfunktion (Behar-
rungswert) abgelesen werden.
Bild 18: A n nä he rung der Ü b e rga ngsfunktio n
durch ein PT2-Glied, J < 0.6
Aus Bild 18 kann der relative Maximalwert
(102)
abgelesen werden. Aus Bild 19 kann mit dem W ert von (102) direkt in die gesuchte Dämpfung J abgelesen werden.
W eiterhin ist aus Bild 18 die Periodendauer abzulesen bzw. T p/2. Nach (75) beträgt die Kreisfrequenz
(103)
Aus (103) kann das gesuchte ù 0 bestimmt werden:
(104)
Bild 19: Dämpfung eines PT2-Gliedes als Funktion des relativen Maximalwertes
Beispiel:
Für die Übergangsfunktion nach Bild 18 lassen sich ablesen:
K e = 10 h max = 11.6 T p/2 = 8.6 s - 3.4 s = 5.2 s
Aus Bild 19 lässt sich mit
ablesen: J = 0.5
Nach (104) ergibt sich:
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
2.5. Reglerdim ensionierungsverfahren 21
2.5.1.4. Beispiele und Aufgaben zu Abschnitt 2.5.1
Beispiel 1:
Gegeben ist die Übertragungsfunktion
a) Geben Sie eine Ersatzübertragungsfunktion 2. Ordnung G E2(p) an.
b) Geben Sie eine Ersatzübertragungsfunktion 1. Ordnung G E1(p) an.
c) Stellen Sie Originalübertragungsfunktion und die 2 Ersatzübertragungsfunktionen im Bodediagramm dar.
d) Schätzen Sie den Bereich der Näherung ab.
Lösungsweg:
a) Geben Sie eine Ersatzübertragungsfunktion 2. Ordnung G E2(p) an.
20 ms + 40ms =60ms
b) Geben Sie eine Ersatzübertragungsfunktion 1. Ordnung G E1(p) an.
60 ms + 0.3 s = 0.36 s
c) Stellen Sie Originalübertragungsfunktion und die 2 Ersatzübertragungsfunktionen im Bodediagramm dar.
a) G(p) - Original
b) G E2(p) = Näherung 2. Ordnung
c) G E1(p) = Näherung 1. Ordnung
d) Schätzen Sie den Bereich der Näherung ab.
Aus Bodediagramm erkennbar: Für ù # 3 s -1 ist eine gute Übereinstimmung zwischen Näherung 1. Ordnung und
der gegebenen Übertragungsfunktion gegeben, für Näherung 2. Ordnung bin etwa ù # 20 s -1. Verwendet man die
Ersatzübertragungsfunktion zur Reglerauslegung, muss ù D (Durchtrittskreisfrequenz) im Bereich der gut angepass-
ten W ert liegen.
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
22 2. W iederholung analoge Theorie
Beispiel 2:
Eine Strecke wird am Eingang mit einem Sprung der Höhe 0.5 beaufschlagt:
u(t) = 0.5*g(t)
Die Strecke hat die dargestellte Sprungantwort.
a) Bestimmen Sie eineErsatzübertragungsfunktion 2. Ordnung.
b) Bestimmen Sie eine Ersatzübertragungsfunktion 1. Ordnung.
Lösungsweg:
a) Bestimmen Sie eine Ersatzübertragungsfunktion 2. Ordnung.
Ablesen aus Sprungantwort:
T T = 50 ms Totzeit eines Laufzeitgliedes
T V1 = 100 ms Verzögerungszeit eines PT1-Gliedes
t64 Eingang u End = 0.5
Ausgang v End = 12
b) Bestimmen Sie eine Ersatzübertragungsfunktion 1. Ordnung.
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
2.5. Reglerdim ensionierungsverfahren 23
Beispiel 3
Eine Strecke wird am Eingang mit einem Sprung der Höhe 0.5 beaufschlagt:
u(t) = 0.3*s(t)
Die Strecke hat die dargestellte Sprungantwort.
Bestimmen Sie eine Ersatzübertragungsfunktion.
Lösungsweg:
Ablesen aus Diagramm:
u End = 0.3
Vend = 15
Vmax = 18.5
T p/2 = 0.93 s - 0.35 s = 0.58 s
Berechnung:
Abgelesen aus Bild 19:h = 0.42
Nach (104) ergibt sich
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
24 2. W iederholung analoge Theorie
Aufgabe 2.5.1 A
Gegeben ist die Übertragungsfunktion
a) Geben Sie eine Ersatzübertragungsfunktion 2. Ordnung G E2(p) an.
b) Geben Sie eine Ersatzübertragungsfunktion 1. Ordnung G E1(p) an.
c) Stellen Sie Originalübertragungsfunktion und die 2 Ersatzübertragungsfunktionen im Bodediagramm dar.
d) Schätzen Sie den Bereich der Näherung ab.
Aufgabe 2.5.1.B (Thema: Ersatzübertragungsfunktion aus Sprungantwort)
Die folgenden Übergangsfunktionen wurden aufgenommen, bestimmen Sie eine Ersatzübertragungsfunktion.
2.5.2. Dämpfung einer Strecke 2. Ordnung
Eine Übertragungsfunktion 2. Ordnung
(105)
kann auch angegeben werden in der Form
(106)
Durch Koeffizientenvergleich von (105) und (106) ergibt sich
=> (107)
=> (108)
Die Nullstellen von (106) bestimmen den Einschwingvorgang und ergeben sich zu:
(109)
Die Lage der Nullstellen (109) in der komplexen Ebene verdeutlicht Bild 20.
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
2.5. Reglerdim ensionierungsverfahren 25
Bild 20: Lage der Pole (Eigenwerte) in der komplexen Ebene
Aus (109) ergibt sich:
(110)
Nach (110) ist der Betrag der Nullstellen gleich w0. Dann kann J auch als Kosinus des W inkels a aus Bild 20
angesehen werden:
J = cos(a) Dämpfungsgrad (111)
Aus (109) kann abgelesen werden:
t-Abklingzeitkonstante, w0-Kennkreisfrequenz (112)
Eigenfrequenz (113)
Die homogene Lösung (Einschwingvorgang) zu (105/106) lautet:
(114)
Mit (112) und (113) lässt sich (114) angeben als:
(115)
Je größer der Faktor J, desto gedämpfter ist die Schwingung. Bei J = 1 stellt sich der aperiodische Grenzfall ein,
der Übergang von konjungiert komplexen zu reellen Nullstellen. J = 1 bedeutet die Grenze zum Überschwingun-
gen, J = 0.7 etwa nur 4 % Überschwingungen bei der Sprungantwort.
Stabilität
Die Stabilität lässt sich aus der homogen Lösung der DGL herleiten. Ist (114/115)abklingend, stellt sich Stabilität
ein. Aus (109) und (114) folgt:
Re(p K ) < 0 => Stabilität (116)
Re(p K ) = 0 => Stabilitätsgrenze, labil (117)
Re(p K ) > 0 => Instabilität, aufklingend (118)
Die oben angegebenen Stabilitätsbedingungen (116) bis (118) gelten nicht nur für eine Strecke 2. Ordnung (wie
hergeleitet), sondern allgemein für Strecken n-ter Ordnung. Dabei sind alle n-Pole der Strecke zu bestimmen. Nur
ein Pol kann schon die Instabilität oder die Stabilitätsgrenze bewirken.
Hinweis 1:
Die Nullstellen des Nennerpolynoms der Übertragungsfunktion sind auch die Nullstellen des charakteristischen
Polynoms in l bei der Bestimmung der homogen Lösung der zu gehörigen DGL.
Hinweis 2:
Ein passives Element (z.B. R-L-C-Schwingkreise) weist immer Stabilität auf (L-C bedeutet nur theoretisch die
Stabilitätsgrenze). Sind aktive Elemente (z.B. Verstärker) vorhanden, kann Instabilität auftreten. Theoretisch gibt
es auch bei passiven Strecken (z.B. magnetischen Aufhängung) Instabilität. Nur wird hier ohne aktive Elemente der
instabile Arbeitspunkt nicht erreicht.
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
26 2. W iederholung analoge Theorie
2.5.3. Regelung einer PT1-Strecke mit einem I-Regler durch Vorgabe der Dämpfung
Eine Strecke mit einer Ersatzübertragungsfunktion nach Abschnitt 2.5.1 kann mit einem I-Regler geregelt werden,
siehe Bild 21.
Bild 21: Regelung einer PT1-Strecke mit I-Regler
Mit der Übertragungsfunktion des Regelgliedes
(119)
und der Strecke mit der Verstärkung K P und der Ersatzzeitkonstanten T e
(120)
ergibt sich aus (119) und (120) für die Übertragungsfunktion des offenen Kreises:
(121)
Mit der Abkürzung
(122)
lässt sich (121) angeben durch:
(123)
Die Übertragungsfunktion des geschlossen Kreises für ein System nach B ild 21 ohne Übertragungsfunktion im
Rückführzweig kann sich wie folgt berechnet werden:
(124)
Durch Einsetzen von (123) in (124) ergibt sich:
(125)
Die Integrationszeit T IK soll durch Vorgabe der Dämpfung J nach Abschnitt 2.5.1 erfolgen. Der Vergleich von
(125) mit (106) lässt erkennen:
(126)
(127)
Durch Einsetzen von (127) in (126) ergibt sich:
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
2.5. Reglerdim ensionierungsverfahren 27
T IK = 4*J 2*T e (128)
Durch Verknüpfung von (122) und (128) bzw. (127) und (128) lässt sich die Integrierzeit T I bzw. der Integrierbei-
wert K I des Regelgliedes bestimmen:
T I = K p*4*J 2*T e ; K I = 1/T I . (129)
Zusammenfassung
(Kopie 123)
T IK = 4*h 2*T e (Kopie 128)
2.5.4. Pol-Nullstellen-Kompensation
Bild 22: Beispiel für Pol-Nullstellen-Kompensation, T 2 > T 1
Am Beispiel nach Bild 22 soll die Pol-Nullstellen-Kompensation erläutert werden, wo eine PT2-Strecke mit Hilfe
eines PI-Reglers geregelt werden soll. Die Übertragungsfunktion des offenen Kreises
(130)
sollte zur analytischen Reglersynthese 2. Ordnung sein. Dazu könnte man T i zu T 1 oder T 2 setzen. W ill man die
Regelung möglichst schnell machen, wählt man:
Ti = T2 (131)
Mit (131) kürzt sich in (130) eine Nullstelle gegen eine Polstelle, und man erhält:
(132)
mit
hat (132) die gleiche Struktur als (123) und T IK kann mit Hilfe von (128) aus Abschnitt 2.5.3 (letzter Abschnitt)
bestimmt werden.
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
28 2. W iederholung analoge Theorie
Beispiel zu den Abschnitten 2.5.1, 2.5.3 und 2.5.4
K S = 0.4 T 1 = 0.5 s
T 2 = 0.2 s T3 = 2 s
Bild 23: Struktur der Regelung für Beispiel
Die PT3-Strecke nach Bild 23
soll mit einen PI-Regler
möglichst schnell ohne Überschwingen geregelt werden.
Lösungsweg:
Es wird gewählt (damit schnell):
Ti = T3 = 2 s
Ersatzübertragungsfunktion
T 12 = T 1 + T 2 = 0.5 s + 0.2 s = 0.7 s
T e = T 12 = 0.7 s
Aus (128) ergibt sich mit h = 1 (ohne Überschwingen):
T IK = 4*h 2 *T e = 4*1 2*0.7 s = 2.8 s
Probe mit Matlab nach Bild 24 ergibt die Sprungantwort der Regelung nach Bild 25.
Bild 24: Struktur Probe Beispiel mit Matlab
Bild 25:
Beispiel, Sprungantwort der geregelten Strecke
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
2.5. Reglerdim ensionierungsverfahren 29
Aufgabe 2.5.4.A
K S = 3 T 1 = 0.04 s
T 2 = 0.08 s T 3 = 0.6 s
Die dargestellte PT3-Strecke
soll mit einen PI-Regler
möglichst schnell mit 4% Überschwingen geregelt werden.
2.5.5. Reglerentwurf im Bodediagramm
In diesem Abschnitt werden die Reglerentwurfsverfahren aus der Vorlesung Regelungstechnik [2] aufgeführt, die
in der Veranstaltung Prozessrechentechnik angewendet werden. Zunächst wird der Entwurf im Bodediagramm
dargestellt, bei dem durch ein Regelglied eine definierte Phasenreserve j m oder Amplitudenreserve G m eingestellt
wird. Die Phasenreserve ist die Differenz des Phasengangs des aufgeschnittenen Regelkreises zu -180 o bei der
Durchtrittsfrequenz wc.
2.5.5.1. M erkmale des Bodediagramms
Anschauliche Darstellung des Systemverhaltens mit
S Abschätzung des Verstärkungs- und Zeitverhaltens (Phasenverschiebung, "Schnelligkeit") in Abhängigkeit der
Kreisfrequenz,
S Abschätzung des Einflusses von Parameteränderungen,
Reglerentwurf erfolgt über Darstellung der Kreisübertragungsfunktion des offenen Kreises G o(s)=G R(s)*Gs(s),
S Streckenfrequenzgang. G s(s) |jw kann analytisch oder experimentell gefunden werden.
2.5.5.2. Syntheseaufgabe
W ie muss der Reglerfrequenzgang von G R(s) die Kreisübertragungsfunktion des offenen Kreise G o(s) verändern,
damit der geschlossene Kreis folgende Anforderungen erfüllt:
a) Stabilität, Dämpfung
Ortskurve von G 0 (s) muss in hinreichendem Abstand vom kritischen Punkt verlaufen (s. Nyquistkriterium)
=> Pasenreserve j m (Betragsreserve G m) muss angemessen groß sein für
S gutes Führungsverhalten: 50 o < j m < 80 o (12dB < G m < 20dB)
S gutes Störverhalten: 20 o < j m < 60 o ( 4dB < G m < 12dB)
b) Bleibende Regeldifferenz
e 4 soll hinreichend klein sein (Verstärkung bei t => 4 sehr groß), am besten G o(s=0) 6 4 (I-Anteil(e)).
c) Schnelligkeit, Anstiegszeit (z.B. der Führungssprungantwort)
Für die Anstiegszeit T sr gilt (Näherungsbetrachtung für G 0 (s) durch hinreichend gedämpftes System zweiter
Ordnung):
, mit wg : 3dB-Bandbreite
Achtung: Stellgliedverhalten bzgl. Bandbreite und Beschränkung.
S Parameterunempfindlichkeit
20*lg (| G o (s)|) durchdringt mit möglichst geringer Steigung die 0db-Linie (> -20 db / Dekade).
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
30 2. W iederholung analoge Theorie
2.5.5.3. Einstellung der Phasenreserve mit P-Regler
W irkung: nur Einfluss auf Betragsgang, Phase bleibt unverändert!
Entwurf: | G o | mit K PR verschieben, bis gewünschte Phasenreserve j m erreicht wird.
Fragen:
S |G o (0)| für gewünschte Regeldifferenz groß genug? nein: PI- (PID-) Regler wählen
S w c groß genug? nein: PD- (PID-) Regler wählen
2.5.5.4. Einstellung der Phasenreserve mit PI-Regler
W irkung: Regelung wird genauer, jedoch nicht schneller
Entwurf:
S | G o | für die Ermittlung von K PR wie beim P-Regler einstellen, dabei j m durch zusätzliche Phasenreserve
Än(10° < Än > 15°) größer als gewünscht wählen.°
S Knickfrequenz 1/T n des PI-Reglers so legen, dass zusätzliche Phasenreserve Dj durch Phasengang dieses
Regelgliedes aufgehoben wird .
Achtung: 1/T n nicht zu klein wählen (T n zu groß), sonst tritt einschleichendes (kriechendes) Verhalten auf!
Fragen: wc groß genug? nein: PID-Regler wählen
2.5.5.5. Einstellung der Phasenreserve mit PD-Regler (real: PDT1-Regler, Lead-Glied)
W irkung: Regelung wird schneller, ggf. stabiler, nicht genauer
Entwurf: Phase anheben, damit wc größer werden kann ( 1/T d in die Nähe der Durchtrittsfrequenz wc des
unkompensierten Falles)
Achtung: D-Anteil problematisch: Störungen werden verstärkt; große Stellgrößen bei schnellen Änderungen der
Regeldifferenz.
2.5.5.6. Einstellung der Phasenreserve mit PID-Regler
W irkung: vereint die Merkmale von P-, PI-, PD-Regler.
2.5.6. Reglerentwurf symmetrisches Optimum
(siehe Abschnitt 6.2.4)
2.5.7. Reglerentwurf Betragsoptimum
xxx noch
2.6. Kaskadenregelung
Bild 26: Mögliche Reihenschaltung einer zu regelnden Strecke
Lässt sich eine zu regelnde Strecke gemäß Bild 26 als Reihenschaltung mehrerer Übertragungsfunktionen mit
kleiner werdender D ynamik darstellen, d.h. die Verzögerungszeit von G S1 ist kleiner als die von G s2 und die ist
wiederum kleiner als die von G S3, kann jede Ausgangsgröße einzeln geregelt werden, die Regelungen bilden dann
eine Kaskade. In diesem Fall kann die Regelung für x 3 langsamer sein als die für die erste und zweite Größe, die
Regelung für x 2 kann wiederum langsamer sein als für die erste Größe. Anwendung findet die Kaskadenregelung
sehr häufig bei der Regelung von Antriebsmaschinen. Bei einer Gleichstrommaschine wäre y die Spannung und x 1
die Größe Strom oder Moment. Das Moment wird integriert zur Größe Geschwindigkeit (Drehzahl), Größe x 2.
Nochmalige Integration ergibt die Position (Drehwinkel), Größe x 3. Für jede der Größen x 1, x 2 und x 3 wird ein
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
2.6. Kaskadenregelung 31
eigener Regler dimensioniert. Bild 27 zeigt die Struktur.
Bild 27: W irkungsplan einer dreischleifigen Kaskadenregelung
Für die Strecke nach Bild 26 wir unter Nichtbeachtung der Größen x 2 und x 3 der x 1-Regler für die Große x 1 nach
bekannten Verfahren dimensioniert, Struktur siehe Bild 28. Ist der x 1-Regler dimensioniert, ergibt sich für den
geschossenen Kreis zwischen m 2 und x 1 deren Übertragungsfunktion des geschlossenen Kreises:
(133)
Bild 28: W irkplan der inneren Kaskade
Im allgemeinen ist (133) von höherer Ordnung. Damit die Dimensionierung des x 2-Reglers einfacher wird, kann
z.B. (133) mit Hilfe einer Ersatzübertragungsfunktion G e1(p) (siehe Abschnitt 2.5.1) vereinfacht werden. Mit
G eW1(p), G Mess2(p) und G S2(p) kann der Regler der zweiten Kaskade ausgelegt werden. Zur besseren Übersicht ist
dieser Teil aus Bild 27 nochmals in Bild 29 dargestellt.
Bild 29: W irkungsplan der mittleren Kaskade
Nach bekannten Verfahren wird der x 2-Regler nach Bild 29 entworfen. Danach wiederholt sich das gleiche Schema:
- Bilden der Übertragungsfunktion von m 3 nach x 2,
- Beschreibung der Ersatzübertragungsfunktion,
- Dimensionierung der nächsten Kaskade.
Aufgabe 2.6.A
Bild 30: In Kaskade zu regelnde Strecke
Die Streck nach Bild 30 soll in Kaskade geregelt werden. Geben Sie die Struktur an.
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
32 2. W iederholung analoge Theorie
2.7. Weitere nützliche regelungstechnische Formeln
2.7.1. Offener Kreis, geschlossener Kreis
Bild 31: Struktur zur Bildung des geschlossenen Kreises,
Sonderfall Rückführung 1
Um schneller die Übertragungsfunktion des geschlossenen Regelkreises nach Bild 31 zu bilden
(134)
wird die Übertragungsfunktion des offenen Kreises aufgespalten in Zähler- und Nennerpolynom
(135)
Durch Einsetzen von (135) in (134) ergibt sich
(136)
2.7.2. Linearfaktorzerlegung PT2-Glied
Das allgemeine PT2-Glied (nicht schwingungsfähig)
soll in die Linearfaktoren
zerlegt werden. Mit
und den Umformungen
a 2*p 2 + a 1*p +1 = 1
ergeben sich die zwei Verzögungszeiten des PT2-Gliedes
(137)
(138)
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
2.7. W iederholungsaufgaben zu Regelungstechnik (RT) 33
2.8. Wiederholungsaufgaben zu Regelungstechnik (RT)
Diese W iederholungsaufgaben sind kein Inhalt der Vorlesung PRT. Für Studierende die den Stoff der Vorlesung
Regelungstechnik (RT) verstanden haben, sollte die Lösung dieser Aufgaben keine Schwierigkeit bedeuten. Diese
W iederholungsaufgaben sind gedacht für Studierende die vor länger Zeit RT gehört haben und nicht mehr ganz so
fit sind in RT.
RT-W iederholungsaufgabe 1 (ohne Unterlagen)
Geben Sie an, die Laplace-Tranformierten der folgenden Funktion für die gilt : u(t<0) =0 und
a) u(t) = 5 V b) u(t) = 6mV*e -t/T1
-t/4ms
c) u(t) = 2 V*(1 - e ) d) u(t) = 5 V*sin(40*s -1*t)
-1
e) u(t) = 3 V* cos(2*s *t) f) u(t) = 78 mV*e -t/2ms*[cos(3*s -1*t) + 4*sin(3*s -1*t)
g) u(t) = = 8 V t$ 2 s u(t) = 0 t<2s
RT-W iederholungsaufgabe 2 (ohne Unterlagen)
Geben Sie die Zeitfunktionen der folgenden Laplace-Tranformierten an:
a) b)
c) d)
e)
f)
RT-W iederholungsaufgabe 3
Geben Sie die Laplace-Tranformierte der folgenden der folgenden Zeitfunktion mit Anfangsbedingungen an.
a) 4*u’ u(t=0) = u 0 = 5 V
b) 6*iO i0 = 5 A i0' = 2 As -1
c) 5*uO + 2*uN + 3*u u 0 = 2.5 V u 0N = 4 Vs -1 u 0O = 6 Vs -2
RT-W iederholungsaufgabe 4
Geben Sie die Laplace-Tranformierte des dargestellten Zeitverlaufs an.
RT-W iederholungsaufgabe 5
a) Skizzieren Sie einen realen rechteckförmigen Einheitsimpuls der Breite
ô = 10 µs.
b) Geben Sie dessen Laplace-Tranformierte an.
RT-W iederholungsaufgabe 6
a) Skizzieren Sie einen realen Einheitsimpuls der Form
y(t) = K*e -t/10µs
b) Geben Sie dessen Laplace-Tranformierte an.
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
34 2. W iederholung analoge Theorie
RT-W iederholungsaufgabe 7
a) Geben Sie die allgemeine DGL für ein System 3. Ordnung an.
b) Gegen Sie die zugehörige Übertragungsfunktion an.
RT-W iederholungsaufgabe 8
Ein System wird am Eingang mit dem Einheitsimpuls u(t) =
ä(t) beaufschlagt. Die Antwort sei v(t) = g(t).
W ie bestimmt man aus v(t) die Übertragungsfunktion
RT-W iederholungsaufgabe 9
Ein System wird am Eingang mit U(p) = {u(t)} beauf-
schlagt. Die Ausgang antwortet mit V(p) = {v(t)}. Geben
Sie die Übertragungsfunktion G(p) an
RT-W iederholungsaufgabe 10
Ein System wird am Eingang mit einem Sprung beaufschlagt.
u(t) = K*s(t)
Der Ausgang antwortet mit V(p) = {v(t)}. Geben Sie die
Übertragungsfunktion G(p) an.
RT-W iederholungsaufgabe 11
Für ein P-Glied mit K p = 10 ist:
a) Die Sprungantwort für u(t) = 0.7 V zu skizzieren.
b) Das Bodediagramm zu skizzieren.
c) Die Übertragungsfunktion anzugeben.
RT-W iederholungsaufgabe 12
Für ein PT1-Glied mit K p = 10 und T 1 = 5 ms ist:
a) Die Sprungantwort für u(t) = 0.7 V zu skizzieren.
b) Das Bodediagramm zu skizzieren.
c) Die Übertragungsfunktion anzugeben.
RT-W iederholungsaufgabe 13
Für ein I-Glied mit T I = 5 ms ist:
a) Die Sprungantwort für u(t) = 0.7 V zu skizzieren.
b) Das Bodediagramm zu skizzieren.
c) Die Übertragungsfunktion anzugeben.
RT-W iederholungsaufgabe 14
Für ein PI-Glied mit T i = 2 ms, K p = 10 ist:
a) Die Sprungantwort für u(t) = 0.7 V zu skizzieren
Kennzeichnen Sie in der Skizze T i und T I.
b) Das Bodediagramm zu skizzieren.
c) Die Übertragungsfunktion anzugeben.
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
2.7. W iederholungsaufgaben zu Regelungstechnik (RT) 35
RT-W iederholungsaufgabe 15
Für ein PI-Glied mit T I = 5 ms, K p = 10 ist:
a) Die Sprungantwort für u(t) = 0.7 V zu skizzieren
Kennzeichnen Sie in der Skizze T i und T I.
b) Das Bodediagramm zu skizzieren.
c) Die Übertragungsfunktion anzugeben.
RT-W iederholungsaufgaben 16
Geben Sie 3 allgemeine Formen eines PT2-Gliedes an.
RT-W iederholungsaufgabe 17
W as bedeutet bei einem PT2-Glied schwingungsfähig ?
RT-W iederholungsaufgabe 18
Geben Sie für ein PT2-Glied mit K p = 10, T 1 = 0.1 s und T 2 = 10 s
den W ert h an.
RT-W iederholungsaufgabe 19
Gegeben ist ein schwingungsfähiges PT2-Glied.
Bestimmen Sie a 2 und a 1 damit sich die Parameter ù 0 = 20 s -1 und h = 0.7 einstellen.
RT-W iederholungsaufgabe 20
W ann ist ein PT2 Glied stabil?
a) In Bezug auf die Pole?
b) In Bezug auf h?
c) In Bezug auf die Koeffizienten a 0, a 1 und a 2?
Version 2.0 18.09.2006, 11.39 Uhr C:\Vorl\PRT\PRT_Skript_WS_06_07_Kap_1_Kap_2.wpd
Das könnte Ihnen auch gefallen
- Skript (Komplett)Dokument139 SeitenSkript (Komplett)Vu Thanh Hai PhamNoch keine Bewertungen
- Stabilität und Parametrierung: Kompendium Simulation und Regelung technischer Prozesse, Teil 12Von EverandStabilität und Parametrierung: Kompendium Simulation und Regelung technischer Prozesse, Teil 12Noch keine Bewertungen
- PID-Regler: Kompendium Simulation und Regelung technischer Prozesse, Teil 10Von EverandPID-Regler: Kompendium Simulation und Regelung technischer Prozesse, Teil 10Noch keine Bewertungen
- RT2 EIT Skript Teil10 11 Zustandsraum MIMO V1.0Dokument35 SeitenRT2 EIT Skript Teil10 11 Zustandsraum MIMO V1.0davidzoggNoch keine Bewertungen
- Zweipunkt- und Dreipunktregler: Kompendium Simulation und Regelung technischer Prozesse, Teil 9Von EverandZweipunkt- und Dreipunktregler: Kompendium Simulation und Regelung technischer Prozesse, Teil 9Noch keine Bewertungen
- V2 Identifikation Motor Und Regelung 20 21Dokument10 SeitenV2 Identifikation Motor Und Regelung 20 21fabrice temgusNoch keine Bewertungen
- Lineare Systeme: Kompendium Simulation und Regelung technischer Prozesse, Teil 3Von EverandLineare Systeme: Kompendium Simulation und Regelung technischer Prozesse, Teil 3Noch keine Bewertungen
- Frequenzverhalten linearer Systeme: Kompendium Simulation und Regelung technischer Prozesse, Teil 7Von EverandFrequenzverhalten linearer Systeme: Kompendium Simulation und Regelung technischer Prozesse, Teil 7Noch keine Bewertungen
- PRT Skript WS 06 07 Kap 4Dokument15 SeitenPRT Skript WS 06 07 Kap 4Simon G CalloNoch keine Bewertungen
- Lineare Basisübertragungsglieder: Kompendium Simulation und Regelung technischer Prozesse, Teil 8Von EverandLineare Basisübertragungsglieder: Kompendium Simulation und Regelung technischer Prozesse, Teil 8Noch keine Bewertungen
- Rege Lungs Technik Skrip TDokument47 SeitenRege Lungs Technik Skrip Ttariq mahfoudNoch keine Bewertungen
- Digitale Implementierung von Reglern: Kompendium Simulation und Regelung technischer Prozesse, Teil 11Von EverandDigitale Implementierung von Reglern: Kompendium Simulation und Regelung technischer Prozesse, Teil 11Noch keine Bewertungen
- Pcnews 14Dokument64 SeitenPcnews 14Franz FialaNoch keine Bewertungen
- KDG 1Dokument10 SeitenKDG 1Atef NazNoch keine Bewertungen
- 2009 Steuerungs Undregelungstechnik - 2 PDFDokument37 Seiten2009 Steuerungs Undregelungstechnik - 2 PDFMicheal KingNoch keine Bewertungen
- Numerische Grundlagen der Simulation: Kompendium Simulation und Regelung technischer Prozesse, Teil 5Von EverandNumerische Grundlagen der Simulation: Kompendium Simulation und Regelung technischer Prozesse, Teil 5Noch keine Bewertungen
- Grundlagen Der RegelungstechnikDokument134 SeitenGrundlagen Der RegelungstechnikPiedmondNoch keine Bewertungen
- Simulation 2Dokument162 SeitenSimulation 2flasnicugNoch keine Bewertungen
- Ntmkap 7 DigmodDokument18 SeitenNtmkap 7 Digmodh4lcyNoch keine Bewertungen
- Versuch4 Laborübugn BodediagramDokument27 SeitenVersuch4 Laborübugn BodediagramNemanja JovicicNoch keine Bewertungen
- Bode Diagram MDokument8 SeitenBode Diagram MMrMcFloNoch keine Bewertungen
- BUCH11Dokument44 SeitenBUCH11Audrius IlgeviciusNoch keine Bewertungen
- Multiple lineare Regression & High Performance Computing: Methodik und Software-Implementation komplexer AnalysemodelleVon EverandMultiple lineare Regression & High Performance Computing: Methodik und Software-Implementation komplexer AnalysemodelleNoch keine Bewertungen
- Optimaler ReglereinstellungDokument10 SeitenOptimaler Reglereinstellungpetrolhead85Noch keine Bewertungen
- Antriebsstrang HausaufgabeDokument2 SeitenAntriebsstrang HausaufgabeAtef NazNoch keine Bewertungen
- Dynamische Analyse Der MaschinenDokument15 SeitenDynamische Analyse Der MaschinenIoana AcsenteNoch keine Bewertungen
- Signale Wichtig Energie SignalDokument16 SeitenSignale Wichtig Energie SignalAbu_ONoch keine Bewertungen
- Verallgemeinerte Funktionen: Grundlagen und AnwendungsbeispieleVon EverandVerallgemeinerte Funktionen: Grundlagen und AnwendungsbeispieleNoch keine Bewertungen
- FaltungDokument14 SeitenFaltungBrianboitanoNoch keine Bewertungen
- SteuerungstechnikDokument26 SeitenSteuerungstechnikTomasz FrydekNoch keine Bewertungen
- VGI 198409 BaumannDokument15 SeitenVGI 198409 BaumannOvidiu PanteaNoch keine Bewertungen
- Rs Ue ws1718Dokument8 SeitenRs Ue ws1718neumair.evaNoch keine Bewertungen
- Mechatronik E4 Beispiel KapitelDokument75 SeitenMechatronik E4 Beispiel Kapitelarshia rafeiNoch keine Bewertungen
- Aufg RUE 5 1819 PDFDokument4 SeitenAufg RUE 5 1819 PDFOdenbachNoch keine Bewertungen
- Grundlagen Der AutomatisierungstechnikDokument126 SeitenGrundlagen Der AutomatisierungstechnikPiedmondNoch keine Bewertungen
- Gnuplot and CDokument135 SeitenGnuplot and CDr. Varga IstvanNoch keine Bewertungen
- Laplace-Transformation: Kompendium Simulation und Regelung technischer Prozesse, Teil 4Von EverandLaplace-Transformation: Kompendium Simulation und Regelung technischer Prozesse, Teil 4Noch keine Bewertungen
- Prüfung Grundlagen Der Regelungstechnik WS 08/09: Name, Vorname: MatrikelnummerDokument16 SeitenPrüfung Grundlagen Der Regelungstechnik WS 08/09: Name, Vorname: MatrikelnummerSSdSSNoch keine Bewertungen
- ElektrotechnikDokument8 SeitenElektrotechnikCarlos CalvoNoch keine Bewertungen
- FP Physik 12 13 FHDokument7 SeitenFP Physik 12 13 FHDanang KusnadiNoch keine Bewertungen
- Einführung in die numerische StrömungsmechanikVon EverandEinführung in die numerische StrömungsmechanikBewertung: 1 von 5 Sternen1/5 (1)
- Prüfung Grundlagen Der Regelungstechnik WS 07/08: Name, Vorname: MatrikelnummerDokument17 SeitenPrüfung Grundlagen Der Regelungstechnik WS 07/08: Name, Vorname: MatrikelnummerSSdSSNoch keine Bewertungen
- Die Fourier-Transformation in Der Signalverarbeitung Kontinuierliche Und Diskrete Verfahren Der Praxis Dr.-Ing. Dietmar Achilles 1978Dokument196 SeitenDie Fourier-Transformation in Der Signalverarbeitung Kontinuierliche Und Diskrete Verfahren Der Praxis Dr.-Ing. Dietmar Achilles 1978William VenegasNoch keine Bewertungen
- Vorlesung RegelungstechnikDokument137 SeitenVorlesung RegelungstechnikDamir MiletaNoch keine Bewertungen
- Simulation technischer Prozesse mit LabVIEW: Kompendium Simulation und Regelung technischer Prozesse, Teil 6Von EverandSimulation technischer Prozesse mit LabVIEW: Kompendium Simulation und Regelung technischer Prozesse, Teil 6Noch keine Bewertungen
- Integration Von Tribosystemen in MKS-Modelle Am Beispiel Von MotorkomponentenDokument8 SeitenIntegration Von Tribosystemen in MKS-Modelle Am Beispiel Von MotorkomponentenPeet89Noch keine Bewertungen
- Messwertblockformeln V111Dokument7 SeitenMesswertblockformeln V111Liu HelloNoch keine Bewertungen
- Presti 2000Dokument12 SeitenPresti 2000Akos SzaboNoch keine Bewertungen
- DS Klausur 1516Dokument24 SeitenDS Klausur 1516Chenyu ZhangNoch keine Bewertungen
- RegeltechnikDokument103 SeitenRegeltechnikPlastibox100% (1)
- Ballonfahrt - Eine Einführung in Die DifferentialrechnungDokument3 SeitenBallonfahrt - Eine Einführung in Die DifferentialrechnungdulcineafanNoch keine Bewertungen
- RegelungstechnikDokument395 SeitenRegelungstechnikAmarok81Noch keine Bewertungen
- Versuchsanleitung FlipFlopDokument16 SeitenVersuchsanleitung FlipFlopLabossef LabossefchedlyNoch keine Bewertungen
- Einstieg ins Machine Learning: Grundlagen, Prinzipien, erste SchritteVon EverandEinstieg ins Machine Learning: Grundlagen, Prinzipien, erste SchritteNoch keine Bewertungen
- Messen von Wechselgrößen: Kompendium Messtechnik und Sensorik, Teil 3Von EverandMessen von Wechselgrößen: Kompendium Messtechnik und Sensorik, Teil 3Bewertung: 5 von 5 Sternen5/5 (1)
- Aufg RUE 1 1819 PDFDokument4 SeitenAufg RUE 1 1819 PDFOdenbachNoch keine Bewertungen
- FR B03 RégulationDokument64 SeitenFR B03 RégulationS'LaMa MedNoch keine Bewertungen
- Anschutz Fortner 1727FDokument4 SeitenAnschutz Fortner 1727FPeter DavidsonNoch keine Bewertungen
- Bosch Akku-Bohrhammer GBH 18V-26 F Mit 2x 5,0 Ah Akkus + Lader + L-BOXX 3165140903547 EbayDokument1 SeiteBosch Akku-Bohrhammer GBH 18V-26 F Mit 2x 5,0 Ah Akkus + Lader + L-BOXX 3165140903547 EbayBehare LlapushiNoch keine Bewertungen
- Deutsche Akkreditierungsstelle GMBH Anlage Zur Akkreditierungsurkunde D-Zm-18453-01-00 Nach Din en Iso/Iec 17021-1:2015Dokument4 SeitenDeutsche Akkreditierungsstelle GMBH Anlage Zur Akkreditierungsurkunde D-Zm-18453-01-00 Nach Din en Iso/Iec 17021-1:2015AdisNoch keine Bewertungen
- EPA Servomotor SH BrochureDokument20 SeitenEPA Servomotor SH BrochureВадимNoch keine Bewertungen
- Stinkens, Spuren Eines Fremden in Der NäheDokument146 SeitenStinkens, Spuren Eines Fremden in Der Näheaudiotext77ableNoch keine Bewertungen
- Deutsch Als Fremdsprache - PhonetikDokument13 SeitenDeutsch Als Fremdsprache - PhonetikCimarron1989Noch keine Bewertungen
- Morgan - Marlo - TraumreisendeDokument300 SeitenMorgan - Marlo - TraumreisendeBenSchroeterNoch keine Bewertungen