Das könnte Ihnen auch gefallen
- PROFIBUS Manual: A collection of information explaining PROFIBUS networksVon EverandPROFIBUS Manual: A collection of information explaining PROFIBUS networksBewertung: 3 von 5 Sternen3/5 (2)
- Traum vom intelligenten Zuhause - Band 2: Programmier-Ratgeber für LCN ProVon EverandTraum vom intelligenten Zuhause - Band 2: Programmier-Ratgeber für LCN ProNoch keine Bewertungen
- Multi Control SW 02 20 22 2003 DEDokument18 SeitenMulti Control SW 02 20 22 2003 DEEugeniaNoch keine Bewertungen
- SE WP Energyflowmanagement Fronius GEN24 deDokument10 SeitenSE WP Energyflowmanagement Fronius GEN24 deArtem IegorovNoch keine Bewertungen
- 1S5L89 08-2022 Exp-Mbtcp-Adv enDokument8 Seiten1S5L89 08-2022 Exp-Mbtcp-Adv enAdrian HurezeanuNoch keine Bewertungen
- 0919620X - 0698 MM Profibus (D)Dokument36 Seiten0919620X - 0698 MM Profibus (D)Al BergersenNoch keine Bewertungen
- Catalogo JetcatDokument64 SeitenCatalogo JetcatJC93_scribdNoch keine Bewertungen
- PDF Bedienungsanleitung Comfort Soft Comfort DownloadDokument52 SeitenPDF Bedienungsanleitung Comfort Soft Comfort DownloadPat CarpaNoch keine Bewertungen
- Manual - DE Параметры в ПКDokument32 SeitenManual - DE Параметры в ПКgera25Noch keine Bewertungen
- Sick Lector CLV PNDP v2 00 deDokument26 SeitenSick Lector CLV PNDP v2 00 deRafael GagoNoch keine Bewertungen
- NT00320-DE-02 - RTU Control & FormulasDokument36 SeitenNT00320-DE-02 - RTU Control & FormulasSamuel SayanNoch keine Bewertungen
- CODESYS OPC UA PubSub SL - deDokument5 SeitenCODESYS OPC UA PubSub SL - deNhanNoch keine Bewertungen
- Spez KR C1 07 enDokument29 SeitenSpez KR C1 07 enafonsomoutinhoNoch keine Bewertungen
- Roconet-V1 6 1Dokument19 SeitenRoconet-V1 6 1Gerben VersteegNoch keine Bewertungen
- V233-5017-CC - Module GPRS Mini HF 2Dokument11 SeitenV233-5017-CC - Module GPRS Mini HF 2douceur.agenda0uNoch keine Bewertungen
- HK 450 Mit CC3DDokument18 SeitenHK 450 Mit CC3DStefanHristozovNoch keine Bewertungen
- SICK Lector CLV6XX PNDP V1 1 TIA DE PDFDokument25 SeitenSICK Lector CLV6XX PNDP V1 1 TIA DE PDFPiotr BzdręgaNoch keine Bewertungen
- Mikrocontroller Und AssemblerDokument11 SeitenMikrocontroller Und AssemblerchekorteNoch keine Bewertungen
- Muller Elektronik - DEDokument96 SeitenMuller Elektronik - DEAdrian NazareNoch keine Bewertungen
- ReleaseNotes DE V4.28Dokument24 SeitenReleaseNotes DE V4.28Peter SchwarzNoch keine Bewertungen
- MMI Brochure Alert DEDokument9 SeitenMMI Brochure Alert DEAngy RNoch keine Bewertungen
- Meinberg Info Lantime-M300Dokument5 SeitenMeinberg Info Lantime-M300noppelNoch keine Bewertungen
- Can OpenDokument7 SeitenCan Openmarkus_stark3137Noch keine Bewertungen
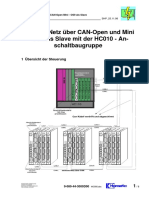
- Serielles Netz Über CAN-Open Und Mini - OS9 Als Slave Mit Der HC010 - An-SchaltbaugruppeDokument8 SeitenSerielles Netz Über CAN-Open Und Mini - OS9 Als Slave Mit Der HC010 - An-SchaltbaugruppeMIguel Angel CorralesNoch keine Bewertungen
- Ret 86010148V01Dokument24 SeitenRet 86010148V01farshadrzvNoch keine Bewertungen
- Beispiel Für Einen MTCNA-TestantwortschlüsselDokument7 SeitenBeispiel Für Einen MTCNA-TestantwortschlüsselScribdTranslationsNoch keine Bewertungen
- Sense It! Connect It! Bus It! Solve It!: Io-Link-Parameter Fm-Im / Fmx-ImDokument26 SeitenSense It! Connect It! Bus It! Solve It!: Io-Link-Parameter Fm-Im / Fmx-ImOsama MahmoudNoch keine Bewertungen
- ControllerDokument29 SeitenControllerArijit MallikNoch keine Bewertungen
- Information LZV100: Art. Nr. / Art. No. / Art. N° 20110 5. Auflage / 5th Edition / 5 Édition, 0608Dokument64 SeitenInformation LZV100: Art. Nr. / Art. No. / Art. N° 20110 5. Auflage / 5th Edition / 5 Édition, 0608francis lambertNoch keine Bewertungen
- BD2002 - Belt Conveyor RIP ControlDokument38 SeitenBD2002 - Belt Conveyor RIP ControlZetoNoch keine Bewertungen
- Adcos Puma Flyer GermanDokument10 SeitenAdcos Puma Flyer GermanNúñez D. PauliNoch keine Bewertungen
- Vag 1552 DeutschDokument33 SeitenVag 1552 DeutschStephan DieterNoch keine Bewertungen
- 1 Aus 4 DecoderDokument6 Seiten1 Aus 4 DecoderMia MaiglöckchenNoch keine Bewertungen
- c8051f0xx Mikrocontroller Und Bascom 8051Dokument33 Seitenc8051f0xx Mikrocontroller Und Bascom 8051Heorhii Andreevich ZemliankoNoch keine Bewertungen
- Pdfslide - Tips - HP Procurve Best Practice Spanning Tree Alle Relevanten Rapid Spanning TreeDokument12 SeitenPdfslide - Tips - HP Procurve Best Practice Spanning Tree Alle Relevanten Rapid Spanning TreePhan Sư ÝnhNoch keine Bewertungen
- Ah de Mguard Config 108392 de 01Dokument156 SeitenAh de Mguard Config 108392 de 01Tưởng VũNoch keine Bewertungen
- STPi PlusDokument25 SeitenSTPi PlusMirnes NuhanovicNoch keine Bewertungen
- Bodas V3.1 DTDokument131 SeitenBodas V3.1 DTcaferNoch keine Bewertungen
- Fvex810dsopho ManualDokument346 SeitenFvex810dsopho Manualnarse8488Noch keine Bewertungen
- Spez KR C1 06 enDokument22 SeitenSpez KR C1 06 enafonsomoutinhoNoch keine Bewertungen
- VIMS-P MPDS 5 Treiber Dokumentation V1.3Dokument16 SeitenVIMS-P MPDS 5 Treiber Dokumentation V1.3i.alexpopescuNoch keine Bewertungen
- Cci D 11Dokument9 SeitenCci D 11Dario BeltramoNoch keine Bewertungen
- SE WP Energy Flow Management Using The Four Digital Outputs deDokument14 SeitenSE WP Energy Flow Management Using The Four Digital Outputs deYanick Nöthiger2Noch keine Bewertungen
- 3100 Release Note Circuitpro 2 30 546 deDokument2 Seiten3100 Release Note Circuitpro 2 30 546 dehoferNoch keine Bewertungen
- Da-AddOn Control 6 20 7Dokument28 SeitenDa-AddOn Control 6 20 7insomnium1227Noch keine Bewertungen
- Interface para Motor Passo A Passo de 4 Pinos: AufbauanweisungDokument4 SeitenInterface para Motor Passo A Passo de 4 Pinos: AufbauanweisungMahmoud SalehNoch keine Bewertungen
- Aufgabe 2: Betriebssystempraktikum Im Wintersemester 2023/2024Dokument5 SeitenAufgabe 2: Betriebssystempraktikum Im Wintersemester 2023/2024warrobots0609Noch keine Bewertungen
- Sick Lector CLV PN CP v2 1 deDokument28 SeitenSick Lector CLV PN CP v2 1 deRafael GagoNoch keine Bewertungen
- LoesDokument66 SeitenLoeshassanaagibNoch keine Bewertungen
- Netio 230bDokument23 SeitenNetio 230bmonacokarlNoch keine Bewertungen
- ifm-O2Dx - S7-CP343 - V1 - 9 DEDokument28 Seitenifm-O2Dx - S7-CP343 - V1 - 9 DEArturososNoch keine Bewertungen
- DS Tzidc de HDokument48 SeitenDS Tzidc de HAbdullah AL JubouryNoch keine Bewertungen
- Zapimos L1 Funktionsbeschreibung UND InstallationsanweisungDokument38 SeitenZapimos L1 Funktionsbeschreibung UND InstallationsanweisungGating SistemNoch keine Bewertungen
- UC300ETH ManualDokument22 SeitenUC300ETH ManualUlrich MorfNoch keine Bewertungen
- s71200 Manual Update de-DE de-DEDokument6 Seitens71200 Manual Update de-DE de-DEdanielcard6228Noch keine Bewertungen
- MP 2000Dokument0 SeitenMP 2000Akos PocikNoch keine Bewertungen
- CardServer V2.02 Technische DokumentationDokument31 SeitenCardServer V2.02 Technische DokumentationLuis Alfredo Ramos FernandezNoch keine Bewertungen
- Ah de Basic Data Phoenix Contact PLC 8007 de 04Dokument12 SeitenAh de Basic Data Phoenix Contact PLC 8007 de 04ZH HamzaNoch keine Bewertungen
- HM XMLRPC API-V2.9Dokument31 SeitenHM XMLRPC API-V2.9stefan.schieleNoch keine Bewertungen
- Elektronische Steuerung HS4 Technisches DatenblattDokument6 SeitenElektronische Steuerung HS4 Technisches DatenblattM ServNoch keine Bewertungen
- 6006 Interroll Lift DE T.Nr.41483 V3.1Dokument26 Seiten6006 Interroll Lift DE T.Nr.41483 V3.1Thomas KirschNoch keine Bewertungen
- DriveControl 20-54 V1-1 de 10-10-21 WebDokument36 SeitenDriveControl 20-54 V1-1 de 10-10-21 WebThomas KirschNoch keine Bewertungen
- Typy Broni 135 Fairey SwordfishDokument20 SeitenTypy Broni 135 Fairey SwordfishThomas KirschNoch keine Bewertungen
- Naal - Programmieren Lenze Fu Lemoc2Dokument13 SeitenNaal - Programmieren Lenze Fu Lemoc2Thomas KirschNoch keine Bewertungen
- Naal - Sew Übertrag Parameter Movitrac A Auf BDokument14 SeitenNaal - Sew Übertrag Parameter Movitrac A Auf BThomas KirschNoch keine Bewertungen
- Parameterübertragung Von Movitrac A Auf Movitrac BDokument12 SeitenParameterübertragung Von Movitrac A Auf Movitrac BThomas KirschNoch keine Bewertungen
- Naal Inbetriebnahme 8200 VectorDokument7 SeitenNaal Inbetriebnahme 8200 VectorThomas KirschNoch keine Bewertungen
- SEW MovitracDokument40 SeitenSEW MovitracThomas KirschNoch keine Bewertungen
- Parameterübertragung Von Movidrive A Auf Movidrive BDokument16 SeitenParameterübertragung Von Movidrive A Auf Movidrive BThomas KirschNoch keine Bewertungen
- Resolver Grundeinstellung Mit MT ManagerDokument11 SeitenResolver Grundeinstellung Mit MT ManagerThomas KirschNoch keine Bewertungen
- Althen SG 2k Ks Stoecklin XX Übersicht 20190307Dokument4 SeitenAlthen SG 2k Ks Stoecklin XX Übersicht 20190307Thomas KirschNoch keine Bewertungen
- Praxis Der Antriebstechnik: Band 1Dokument123 SeitenPraxis Der Antriebstechnik: Band 1Thomas KirschNoch keine Bewertungen
- AG QuellensteuerDokument22 SeitenAG QuellensteuerThomas KirschNoch keine Bewertungen
- VARTA Datenblatt Element 12Dokument2 SeitenVARTA Datenblatt Element 12Thomas KirschNoch keine Bewertungen
- IBN SchlüsselaufnahmeDokument3 SeitenIBN SchlüsselaufnahmeThomas KirschNoch keine Bewertungen
- Bedienung HMI TouchpanelDokument20 SeitenBedienung HMI TouchpanelThomas KirschNoch keine Bewertungen
- Messpraxis Mit MeggerDokument3 SeitenMesspraxis Mit MeggerThomas KirschNoch keine Bewertungen
- Publikation Antrag Pass Personalausweis Kinder DataDokument3 SeitenPublikation Antrag Pass Personalausweis Kinder DataThomas KirschNoch keine Bewertungen