Das könnte Ihnen auch gefallen
- inftech - Physikformelsammlung Themenheft Strahlen u. Atomphysik: Formelsammlung Strahlen- und Atom- PhysikVon Everandinftech - Physikformelsammlung Themenheft Strahlen u. Atomphysik: Formelsammlung Strahlen- und Atom- PhysikNoch keine Bewertungen
- Formeln Physik tm3Dokument10 SeitenFormeln Physik tm3asamtanNoch keine Bewertungen
- Jetzt lerne ich Analysis für die Oberstufe: Differential- und Integralrechnung - www.alles-Mathe.deVon EverandJetzt lerne ich Analysis für die Oberstufe: Differential- und Integralrechnung - www.alles-Mathe.deNoch keine Bewertungen
- FormelsammlungDokument20 SeitenFormelsammlungPetra NietelNoch keine Bewertungen
- Aufgabensammlung Mittelstufe und Realschule: www.mathe-total.deVon EverandAufgabensammlung Mittelstufe und Realschule: www.mathe-total.deNoch keine Bewertungen
- Formelsammlung 1BKFHT1 2010Dokument14 SeitenFormelsammlung 1BKFHT1 2010Tobias AndersonNoch keine Bewertungen
- 01 - Stahlbau - Grundlagen - Vorlesung Stahl - Und HolzbauDokument16 Seiten01 - Stahlbau - Grundlagen - Vorlesung Stahl - Und HolzbauJan Gnat100% (1)
- Kreisbewegungen 1Dokument9 SeitenKreisbewegungen 1Hélène GMNoch keine Bewertungen
- Formel tm1 PDFDokument4 SeitenFormel tm1 PDFmkhalil007Noch keine Bewertungen
- MechanikDokument13 SeitenMechanikMichael BernartzNoch keine Bewertungen
- 3 Dynamik LoesungenDokument30 Seiten3 Dynamik Loesungenth3f1rs7Noch keine Bewertungen
- Kocsányi Problems in Phisyk 1-2Dokument37 SeitenKocsányi Problems in Phisyk 1-2arkathNoch keine Bewertungen
- Protokoll M1 FinalDokument13 SeitenProtokoll M1 Finalbusiness.ahmadialiNoch keine Bewertungen
- Versuch M1Dokument11 SeitenVersuch M1business.ahmadialiNoch keine Bewertungen
- Losung 2Dokument4 SeitenLosung 2noyir45895Noch keine Bewertungen
- R12 - Verzahnung I: Aufgabe 1Dokument8 SeitenR12 - Verzahnung I: Aufgabe 1maraska10Noch keine Bewertungen
- Übungsblatt 1Dokument3 SeitenÜbungsblatt 1bezpalykostyaNoch keine Bewertungen
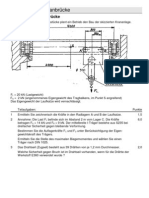
- TGT HP198788-2 KranbrueckeDokument6 SeitenTGT HP198788-2 KranbrueckehippokgNoch keine Bewertungen
- FormelDokument41 SeitenFormelClaudiaNoch keine Bewertungen
- MB002 CellformDokument10 SeitenMB002 Cellformuser 54Noch keine Bewertungen
- Stahlbau Grundlagen - Das Elastische Biegetorsionsproblem 2. Ordnung Dünnwandiger StäbeDokument53 SeitenStahlbau Grundlagen - Das Elastische Biegetorsionsproblem 2. Ordnung Dünnwandiger Stäbep_meulendijks108100% (1)
- Mitra Solutions 3rd Ed 3Dokument43 SeitenMitra Solutions 3rd Ed 3gtm_prgNoch keine Bewertungen
- Formelsammlung MaschinendynamikDokument4 SeitenFormelsammlung MaschinendynamikManuel Eisenfuß HeitzNoch keine Bewertungen
- Musterloesung - SoSe2011 KlausurDokument10 SeitenMusterloesung - SoSe2011 KlausurDavid AhouaNoch keine Bewertungen
- KreisfunktionenDokument45 SeitenKreisfunktionenmanfredm6435100% (1)
- Inbound 9125233560384977728Dokument45 SeitenInbound 9125233560384977728swkn8pdtvbNoch keine Bewertungen
- Fluid DynamicsDokument25 SeitenFluid DynamicspinkallNoch keine Bewertungen
- Zusammenfassung Kreisbewegung Mit AufgabenDokument4 SeitenZusammenfassung Kreisbewegung Mit AufgabenHélène GMNoch keine Bewertungen
- Excerpt 001Dokument27 SeitenExcerpt 001Meizan Twista HerbianNoch keine Bewertungen
- FALA Bericht Massenträgheit Und SchwerpunktDokument22 SeitenFALA Bericht Massenträgheit Und Schwerpunktapi-3809441100% (1)
- Maschinenelemente 2 Haelfte Wipf Mario PDFDokument28 SeitenMaschinenelemente 2 Haelfte Wipf Mario PDFRLE2014Noch keine Bewertungen
- Formeln Physik Gesamt 07 - 2012Dokument28 SeitenFormeln Physik Gesamt 07 - 2012Albertus HolbeinNoch keine Bewertungen
- FormelsammlungDokument4 SeitenFormelsammlungChrist IanNoch keine Bewertungen
- Paduan Prc-Baja BPK DeskartaDokument28 SeitenPaduan Prc-Baja BPK DeskartaChandra WibawaNoch keine Bewertungen
- Musterloesung - SoSe2012 KlausurDokument13 SeitenMusterloesung - SoSe2012 KlausurDavid AhouaNoch keine Bewertungen
- Elektrische Antriebe - 04Dokument12 SeitenElektrische Antriebe - 04bastechNoch keine Bewertungen
- Lagrange Aufgaben PDFDokument15 SeitenLagrange Aufgaben PDFLara R. AdibNoch keine Bewertungen
- RaketenbewegungsgleichungsskriptumDokument27 SeitenRaketenbewegungsgleichungsskriptumhugohalslosNoch keine Bewertungen
- Grundlagen Der Physik I (Uni Ulm) Übung+Lösung14Dokument18 SeitenGrundlagen Der Physik I (Uni Ulm) Übung+Lösung14katbe12Noch keine Bewertungen
- AET 2 - Seminar-Aufg Mit LSG PDFDokument65 SeitenAET 2 - Seminar-Aufg Mit LSG PDFChristian ZienerNoch keine Bewertungen
- Lösung Ausgewählter Aufgaben (Physik)Dokument59 SeitenLösung Ausgewählter Aufgaben (Physik)LiK3_a_RoCkStArNoch keine Bewertungen
- Grundlagen Der Physik I (Uni Ulm) Übung+Lösung12Dokument12 SeitenGrundlagen Der Physik I (Uni Ulm) Übung+Lösung12katbe12Noch keine Bewertungen
- UebungDokument27 SeitenUebungWedo S.Noch keine Bewertungen
- Mathe FormelsammlungDokument27 SeitenMathe FormelsammlungChrischi Be100% (1)
- Zusammenfassung (Physik - Wellen)Dokument4 SeitenZusammenfassung (Physik - Wellen)Land MannNoch keine Bewertungen
- Physik Abitur 2Dokument62 SeitenPhysik Abitur 2İpek DurmazNoch keine Bewertungen
- Grundlagen Der Physik I (Uni Ulm) Übung+Lösung09Dokument11 SeitenGrundlagen Der Physik I (Uni Ulm) Übung+Lösung09yaswa1Noch keine Bewertungen
- Formelsammlung Updated PDFDokument1 SeiteFormelsammlung Updated PDFJohannes HaimannNoch keine Bewertungen
- Übungsklausur Mit LösungDokument8 SeitenÜbungsklausur Mit LösungCelina BitariNoch keine Bewertungen
- BeispielDokument4 SeitenBeispieldivyareddyNoch keine Bewertungen
- Flugmechanik UDokument68 SeitenFlugmechanik UNiklas ObermayerNoch keine Bewertungen
- Edyn HerleitungenDokument5 SeitenEdyn HerleitungenChristoph FröhlichNoch keine Bewertungen
- Formelsammlung OhneDokument1 SeiteFormelsammlung OhneEMPon “Luxenburger98” DutyNoch keine Bewertungen
- Me1lFormelsammlung NeuhDokument6 SeitenMe1lFormelsammlung NeuhLuka VartušekNoch keine Bewertungen
- BSP GZG 1Dokument7 SeitenBSP GZG 1divyareddyNoch keine Bewertungen
- 4 1 A SchwingungenDokument4 Seiten4 1 A SchwingungenNigerian PhoneNoch keine Bewertungen
- Hitungan 13052016Dokument148 SeitenHitungan 13052016Ryo ShinNoch keine Bewertungen
- Formelsammlung UeDokument4 SeitenFormelsammlung UeFelix GieseNoch keine Bewertungen
- Formelsammlung OhneDokument1 SeiteFormelsammlung OhneEMPon “Luxenburger98” DutyNoch keine Bewertungen
- Formeln MechanikDokument3 SeitenFormeln MechanikhotschiNoch keine Bewertungen
- OI FWE200 de V1-0 2012-10Dokument112 SeitenOI FWE200 de V1-0 2012-10Luis MecNoch keine Bewertungen
- Vba - Excel - Germana PDFDokument954 SeitenVba - Excel - Germana PDFdanut_horincas4988Noch keine Bewertungen
- Logo ZFDokument18 SeitenLogo ZFJuanPeriquitanNoch keine Bewertungen
- Service Manual Xelos l2710 v2k 20071126klDokument81 SeitenService Manual Xelos l2710 v2k 20071126klJoan Sanchez RojasNoch keine Bewertungen