Das könnte Ihnen auch gefallen
- HR Funkkolleg Philosophie 17 PDFDokument25 SeitenHR Funkkolleg Philosophie 17 PDFJacknietNoch keine Bewertungen
- Flugmechanik UDokument68 SeitenFlugmechanik UNiklas ObermayerNoch keine Bewertungen
- Physikalische Chemie - Formelsammlung (Gase - Thermodynamik - ThermochemieDokument14 SeitenPhysikalische Chemie - Formelsammlung (Gase - Thermodynamik - ThermochemieDvrm Mslm Gzr100% (1)
- Formelsammlung Physik Fuer MedizinerDokument8 SeitenFormelsammlung Physik Fuer MedizinerJinNX123Noch keine Bewertungen
- FSP - Physik M KursDokument4 SeitenFSP - Physik M Kursshayeste.khodadadNoch keine Bewertungen
- Maschinenelemente 2 Haelfte Wipf Mario PDFDokument28 SeitenMaschinenelemente 2 Haelfte Wipf Mario PDFRLE2014Noch keine Bewertungen
- Starke Abi Prüfung Physik 2022Dokument37 SeitenStarke Abi Prüfung Physik 2022huss eldNoch keine Bewertungen
- Formelsammlung 1BKFHT1 2010Dokument14 SeitenFormelsammlung 1BKFHT1 2010Tobias AndersonNoch keine Bewertungen
- FormelsammlungDokument20 SeitenFormelsammlungPetra NietelNoch keine Bewertungen
- Versuch M1Dokument11 SeitenVersuch M1business.ahmadialiNoch keine Bewertungen
- Losung 2Dokument4 SeitenLosung 2noyir45895Noch keine Bewertungen
- MechanikDokument13 SeitenMechanikMichael BernartzNoch keine Bewertungen
- Version 2 - 1ADokument19 SeitenVersion 2 - 1AĐức ChiếnNoch keine Bewertungen
- 3 14 100101 Kap 03Dokument14 Seiten3 14 100101 Kap 03jillbarz1909Noch keine Bewertungen
- Losung 3Dokument3 SeitenLosung 3noyir45895Noch keine Bewertungen
- 4 1 A SchwingungenDokument4 Seiten4 1 A SchwingungenNigerian PhoneNoch keine Bewertungen
- Grundlagen Der Physik I (Uni Ulm) Übung+Lösung09Dokument11 SeitenGrundlagen Der Physik I (Uni Ulm) Übung+Lösung09yaswa1Noch keine Bewertungen
- Naturwissenschaftliches Grundpraktikum: Physik IDokument9 SeitenNaturwissenschaftliches Grundpraktikum: Physik IPradipta Surya BaskaraNoch keine Bewertungen
- ABFreier FallDokument2 SeitenABFreier FallTom NickNoch keine Bewertungen
- Grundwissen Physik 9te Klasse PDF 14514Dokument4 SeitenGrundwissen Physik 9te Klasse PDF 14514Gymnasium AlbertinumNoch keine Bewertungen
- Übung 2Dokument2 SeitenÜbung 2noyir45895Noch keine Bewertungen
- Pep1 ws20 Blatt03Dokument2 SeitenPep1 ws20 Blatt03rene.delorenzoNoch keine Bewertungen
- VGUEB ModellseismikDokument6 SeitenVGUEB ModellseismikSimon PetersNoch keine Bewertungen
- Zusammenfassung (Physik - Wellen)Dokument4 SeitenZusammenfassung (Physik - Wellen)Land MannNoch keine Bewertungen
- Formeln Physik tm3Dokument10 SeitenFormeln Physik tm3asamtanNoch keine Bewertungen
- Phy 210 Experiment 1 Trägheitsmoment Und DrehimpulsDokument7 SeitenPhy 210 Experiment 1 Trägheitsmoment Und DrehimpulsScribdTranslationsNoch keine Bewertungen
- Musterl Osung Zur Klausur SS09Dokument12 SeitenMusterl Osung Zur Klausur SS09Jay HardwellNoch keine Bewertungen
- Physik TestDokument5 SeitenPhysik Testgurpreetarora1717Noch keine Bewertungen
- Kocsányi Problems in Phisyk 1-2Dokument37 SeitenKocsányi Problems in Phisyk 1-2arkathNoch keine Bewertungen
- 01 - Stahlbau - Grundlagen - Vorlesung Stahl - Und HolzbauDokument16 Seiten01 - Stahlbau - Grundlagen - Vorlesung Stahl - Und HolzbauJan Gnat100% (1)
- GravitationDokument20 SeitenGravitationPhil HempelNoch keine Bewertungen
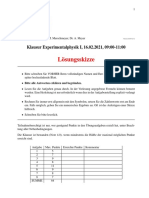
- Klausur 20210216 Solutions Points PDFDokument13 SeitenKlausur 20210216 Solutions Points PDFhasti maghsoudipourNoch keine Bewertungen
- Grundlagen Der Physik I (Uni Ulm) Übung+Lösung12Dokument12 SeitenGrundlagen Der Physik I (Uni Ulm) Übung+Lösung12katbe12Noch keine Bewertungen
- Übungsblatt 8 - Experimentalphysik 1Dokument1 SeiteÜbungsblatt 8 - Experimentalphysik 1shaynonstopNoch keine Bewertungen
- FALA Bericht Massenträgheit Und SchwerpunktDokument22 SeitenFALA Bericht Massenträgheit Und Schwerpunktapi-3809441100% (1)
- FormelDokument41 SeitenFormelClaudiaNoch keine Bewertungen
- Formel Für Den ElektroinstallateurDokument7 SeitenFormel Für Den ElektroinstallateurCristianEscolanoNoch keine Bewertungen
- LK 4Dokument30 SeitenLK 4Green TomateNoch keine Bewertungen
- Losung 1Dokument5 SeitenLosung 1noyir45895Noch keine Bewertungen
- AET 2 - Seminar-Aufg Mit LSG PDFDokument65 SeitenAET 2 - Seminar-Aufg Mit LSG PDFChristian ZienerNoch keine Bewertungen
- TM3 UebungsaufgabenDokument10 SeitenTM3 UebungsaufgabenHelmi DhaouadiNoch keine Bewertungen
- Fluid DynamicsDokument25 SeitenFluid DynamicspinkallNoch keine Bewertungen
- Adiabatenexponent 2Dokument15 SeitenAdiabatenexponent 2UrgalNoch keine Bewertungen
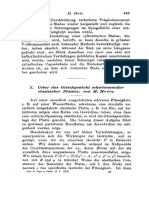
- 1884 Ueber Das Gleichgewicht Schwimmender Elastischer PlattenDokument7 Seiten1884 Ueber Das Gleichgewicht Schwimmender Elastischer PlattenOleNoch keine Bewertungen
- Excerpt 001Dokument27 SeitenExcerpt 001Meizan Twista HerbianNoch keine Bewertungen
- Formelsammlung NeuDokument4 SeitenFormelsammlung NeuMaryna LoginovaNoch keine Bewertungen
- Physik KlausurDokument6 SeitenPhysik KlausurMarcelo LiebmingerNoch keine Bewertungen
- FSP Physik T KursDokument8 SeitenFSP Physik T KursNgọc NghĩaNoch keine Bewertungen
- Messung Von L Und CDokument6 SeitenMessung Von L Und Capi-3708508Noch keine Bewertungen
- Edyn HerleitungenDokument5 SeitenEdyn HerleitungenChristoph FröhlichNoch keine Bewertungen
- Kreisbewegungen 1Dokument9 SeitenKreisbewegungen 1Hélène GMNoch keine Bewertungen
- Versuchsprotokoll B8Dokument9 SeitenVersuchsprotokoll B8pullermannNoch keine Bewertungen
- Formelsammlung OhneDokument1 SeiteFormelsammlung OhneEMPon “Luxenburger98” DutyNoch keine Bewertungen
- Aufg RUE 5 1819 PDFDokument4 SeitenAufg RUE 5 1819 PDFOdenbachNoch keine Bewertungen
- Versuch 0 EPDokument5 SeitenVersuch 0 EPSyed MazharNoch keine Bewertungen
- Grundlagen Der Physik I (Uni Ulm) Übung+Lösung06Dokument17 SeitenGrundlagen Der Physik I (Uni Ulm) Übung+Lösung06scribdreddNoch keine Bewertungen
- Grundlagen Der Physik I (Uni Ulm) Übung+Lösung14Dokument18 SeitenGrundlagen Der Physik I (Uni Ulm) Übung+Lösung14katbe12Noch keine Bewertungen
- Aufgaben Freier FallDokument6 SeitenAufgaben Freier FallDivyant RajNoch keine Bewertungen
- AehnlichkeitszahlenDokument28 SeitenAehnlichkeitszahlengknutNoch keine Bewertungen
- inftech - Physikformelsammlung Themenheft Strahlen u. Atomphysik: Formelsammlung Strahlen- und Atom- PhysikVon Everandinftech - Physikformelsammlung Themenheft Strahlen u. Atomphysik: Formelsammlung Strahlen- und Atom- PhysikNoch keine Bewertungen
- Raumstruktur-Zahl Erhellte Materie-Energie: Die Volumenlänge der Teilchen; Masse und Zahl; Die Erhellung der dunklen MaterieVon EverandRaumstruktur-Zahl Erhellte Materie-Energie: Die Volumenlänge der Teilchen; Masse und Zahl; Die Erhellung der dunklen MaterieNoch keine Bewertungen
- 03: Statische Und Dynamische Analyse Einer Regelstrecke: Praktikum Regelungstechnik Für MaschinenbauDokument7 Seiten03: Statische Und Dynamische Analyse Einer Regelstrecke: Praktikum Regelungstechnik Für MaschinenbauWitali SacharowNoch keine Bewertungen
- C.11 1 GraffeDokument6 SeitenC.11 1 GraffeBen GrafNoch keine Bewertungen
- Jumo Einbauthermostate Bed.-AnleitungDokument2 SeitenJumo Einbauthermostate Bed.-AnleitungMischa LinnemannNoch keine Bewertungen
- WirtschaftsstatistikDokument50 SeitenWirtschaftsstatistikABT100% (1)
- SCK PosterDokument1 SeiteSCK PosterMahmoud Al HomranNoch keine Bewertungen