Beruflich Dokumente
Kultur Dokumente
Grundlagen Der Physik I (Uni Ulm) Übung+Lösung13
Hochgeladen von
katbe12Originaltitel
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Grundlagen Der Physik I (Uni Ulm) Übung+Lösung13
Hochgeladen von
katbe12Copyright:
Verfügbare Formate
Übungsblatt 13
PHYS1100 Grundkurs I (Physik, Wirtschaftsphysik, Physik Lehramt)
Othmar Marti, (othmar.marti@uni-ulm.de)
3. 2. 2006 und 6. 2. 2006
1 Aufgaben
1. Zwei identische Körper werden unter relativistischen Bedingungen aneinander ge-
streut. Der eine Körper sei in Ruhe im Laborsystem. Der andere Körper habe die
Gesamtenergie Ea . Die Wahrscheinlichkeitsdichte für die Streuung in den Winkel
ϑ∗ im Schwerpunktssystem ist durch
µ ∗¶
∗ ∗ ∗ ϑ
p (ϑ ) = p0 cos
2
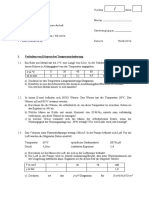
gegeben. Das Polardiagramm sieht folgendermassen aus:
Polardiagramm
Berechnen Sie im Laborsystem
2 1,0 die Winkelabhängigkeit der Wahr-
1
0,8 scheinlichkeitsdichte p(ϑd ) für die
0,6 Streuung in den Winkel ϑd für die
0,4
Fälle
a) Ea − m0 c2 ¿ m0 c2
0,2
3
0,0 0
1,0 0,8 0,6 0,4 0,2 0,0 0,2 0,4 0,6 0,8 1,0
0,2 b) Ea = 2m0 c2
6
c) Ea = 10m0 c2
0,4
0,6
4 0,8 und zeichnen Sie jeweils das dazu-
1,0
5
cos(theta/2)
gehörige Polardiagramm.
2. Ein Ziegelstein mit den Massen a = 20cm, b = 10cm und c = 8cm rotiere frei um
Drehachsen durch seinen Schwerpunkt. Berechnen Sie jeweils das Trägheitsmoment
für die Drehachsen parallel zu den Kanten.
3. Wir markieren auf einer Drehachse den Punkt 0. Das mitrotierende Koordina-
tensystem sei so angelegt, dass der Nullpunkt des Koordinatensystems mit 0 zu-
sammenfällt und dass die z-Achse mit der Rotationsachse zusammenfällt. An den
Übungsblatt vom 3. 2. 2006 und 6. 2. 2006 1 c
°2005-2006 University of Ulm, Othmar Marti
2 PHYS 1100 Grundkurs I WH 2005-2006 Übungsblatt 13
Punkten P1 = (4cm, 0, 10cm) und P2 = (−4cm, 0, 10cm) sei jeweils eine Masse
m1 = m2 = 50g befestigt. Diese Massen rotieren mit 600U/min.
a) Berechnen Sie bezüglich 0 die Grösse Lp im mitrotierenden Koordinatensys-
tem.
b) Berechnen Sie bezüglich 0 die Grösse Ls im mitrotierenden Koordinatensys-
tem.
c) Berechnen Sie bezüglich 0 die Grösse L0 im mitrotierenden Koordinatensys-
tem.
d) Nun sei m2 = 100g. Berechnen Sie die gleichen Grössen wie vorher für die
neue Situation.
4. Ein Keil (Länge a, Breite an der Basis b und Höhe c, Masse m) steht auf der Kante
und fällt nach rechts.
a) Berechnen Sie das Trägheitsmoment bezo-
gen auf die Drehachse beim Fallen.
b) Wie lautet die Bewegungsgleichung für
φ(t)?
c) Wie gross kann φ(t) maximal werden?
d) Geben Sie die linearisierte Bewegungsglei-
chung an!
e) Lösen Sie die linearisierte Bewegungsglei-
chung.
f) Entwickeln Sie den nichtlinearen Term bis
zur ersten nichtlinearen nicht verschwin-
denden Potenz und geben Sie die nächs-
te nichttriviale vereinfachte Bewegungs-
gleichung an.
g) Setzen Sie die Lösung als Lösung der linea-
risierten Bewegungsgleichung plus eine un-
bekannte Funktion (Störterm) an und set-
zen Sie diesen Ansatz in die Bewegungs-
gleichung der vorherigen Teilaufgabe ein.
h) Geben Sie eine Lösung für den Störterm
an.
5. Ein Körper sei aus vier identischen Würfeln mit der Kantenlänge a und der
Masse m zusammengesetzt, wobei die Würfelkanten parallel zu einem kartesi-
schen Koordinatensystem seien. Die Massenmittelpunkte der vier Würfel befinden
Übungsblatt vom 3. 2. 2006 und 6. 2. 2006 2 c
°2005-2006 University of Ulm, Othmar Marti
Übungsblatt 13 PHYS 1100 Grundkurs I WH 2005-2006 3
sich an den Punkten (a/2, a/2, a/2), (−a/2, − a/2, a/2), (a/2, − a/2, 3a/2) und
(−a/2, a/2, 3a/2). Berechnen Sie bezüglich des Punktes 0 (Koordinatenursprung)
die drei Trägheitsmomente Ijj und die drei Deviationsmomente Iik .
6. Der Körper aus der vorherigen Aufgabe rotiere jeweils um die x-, y- und die z-
Achse sowie um die Winkelhalbierende zwischen der x- und der z-Achse mit der
Winkelgeschwindigkeit ω. Geben Sie die dazugehörigen kinetischen Energien an.
7. Geben Sie das Trägheitsellipsoid für den vorherigen Körper an. Zu welcher Kate-
gorie gehört das Trägheitsellipsoid?
8. Ein homogener Stab der Masse m, mit einem quadratischen Querschnitt (Sei-
tenlänge a) und der Länge ` besitze zwei Aufhängungspunkte im Abstand `/4 und
4`/5 von einem Ende aus gemessen.
a) Berechnen Sie das Trägheitsmoment für die beiden Aufhängungspunkte.
b) Berechnen Sie die Schwingungsdauer für die beiden Aufhängungspunkte.
c) Welche Beziehungen können Sie aus der Messung der Schwingungsdauer für
die beiden Aufhängungspunkte ableiten?
(Dieses Pendel heisst auch Reversionspendel).
Übungsblatt vom 3. 2. 2006 und 6. 2. 2006 3 c
°2005-2006 University of Ulm, Othmar Marti
4 PHYS 1100 Grundkurs I WH 2005-2006 Übungsblatt 13
2 Lösungen
1. Wir haben eine Verteilungsfunktion p∗ (ϑ∗ ) gegeben. ϑ und ϑ∗ hängen über
µ µ ∗ ¶¶
∗ ϑ
ϑd (ϑ ) = arctan A tan
2
zusammen, wobei s
2m0 c2
A=
Ea + m0 c2
ist. Die Umkehrfunktion ist
µ ¶
∗ 1
ϑ (ϑd ) = 2 arctan tan (ϑd )
A
Die Anzahl der gestreuten Teilchen in den Winkelbereich dϑ∗ ist
p∗ (ϑ∗ )dϑ∗
oder
p(ϑd )dϑd
Die beiden Ausdrücke müssen gleich sein (sie berechnen eine Anzahl Teilchen pro
Zeiteinheit), also hat man
p∗ (ϑ∗ )dϑ∗ = p(ϑd )dϑd
und
dϑ∗ p∗ (ϑ∗ )
p(ϑd ) = p∗ (ϑ∗ ) = dϑd
dϑd dϑ∗
Beim Ausdruck im Laborsystem gilt
p(ϑd ) = p(ϑd (ϑ∗ )) = p∗ (ϑ∗ ) = p∗ (ϑ∗ (ϑd ))
Andererseits muss ϑ∗ in dϑd umgerechnet werden. Dies geschieht über die Steigung,
d.h. die erste Ableitung.
dϑd
dϑd = ∗ dϑ∗
dϑ
Die Ableitung ist ¡ ∗¢
dϑd A 1 + tan2 ϑ2
= ¡ ∗¢
dϑ∗ 2 1 + A2 tan2 ϑ2
Zusammen bekommt man
¡ ϑ∗ ¢ ¡ ϑ∗ ¢ ¡ ¡ ¢¢
2 ϑ∗
p∗ (ϑ∗ ) p∗0 cos 2
2p ∗
0 cos 1 + A 2
tan
p(ϑd ) = 2 ϑ∗
= 2 ϑ∗
= ¡2 ¡ ∗ ¢¢ 2
A 1+tan ( 2 ) A 1+tan ( 2 ) A 1 + tan2 ϑ2
2 1+A2 tan2 ( ϑ∗ ) 2 1+A2 tan2 ( ϑ∗ )
2 2
Übungsblatt vom 3. 2. 2006 und 6. 2. 2006 4 c
°2005-2006 University of Ulm, Othmar Marti
Übungsblatt 13 PHYS 1100 Grundkurs I WH 2005-2006 5
Nun müssen wir noch ϑ∗ (ϑd ) einsetzen und bekommen
µ ¶µ µ ¶¶
∗ 2 arctan( A
1
tan(ϑd )) 2 2 2 arctan( A
1
tan(ϑd ))
2p0 cos 2
1 + A tan 2
p(ϑd ) = µ µ ¶¶
2 arctan( A
1
tan(ϑd ))
A 1 + tan2 2
¡ ¡ ¢¢ ¡ ¡ ¡ ¢¢¢
2p∗0 cos arctan A1 tan (ϑd ) 1 + A2 tan2 arctan A1 tan (ϑd )
= ¡ ¡ ¡ ¢¢¢
A 1 + tan2 arctan A1 tan (ϑd )
¡ ¡ ¢¢ ³ ¡ ¢2 ´
2p∗0 cos arctan A1 tan (ϑd ) 1 + A2 A1 tan (ϑd )
= ³ ¡1 ¢2 ´
A 1 + A tan (ϑd )
2Ap∗0 √ A
(1 + tan2 (ϑd ))
A2 +tan2 (ϑd )
=
(A2 + tan2 (ϑd ))
2A2 p∗0 (1 + tan2 (ϑd ))
= 3/2
(A2 + tan2 (ϑd ))
wobei wir die Identität
µ ¶
1
arctan x = − arccos √
1 + x2
verwendet haben. Zur Darstellung setzen wir p∗0 = 1/2 und erhalten
Die Ursprüngliche Funktion ergäbe den unten stehenden Graph, wobei eine nega-
tive Wahrscheinlichkeitsdichte physikalisch nicht sinnvoll ist.
Übungsblatt vom 3. 2. 2006 und 6. 2. 2006 5 c
°2005-2006 University of Ulm, Othmar Marti
6 PHYS 1100 Grundkurs I WH 2005-2006 Übungsblatt 13
2.
Z Z
2
I= r dm = ρ r2 dV
a c
Zb Z2 Z2
= 2ρ x2 + y 2 dxdydz
0 0 − 2c
a
Zb Z2 · ¸ 2c
1 3
= 2ρ x + xy 2 dydz
3 − 2c
0 0
a
Zb Z2 µ ¶
1 3 2
= 2ρ c + cy dydz
12
0 0
Zb µ ¶
c3 a c a3
= 2ρ · + · dz
12 2 3 8
0
µ 3 ¶ µ ¶
ac a3 c m abc3 a3 bc
= 2ρb + = +
24 24 abc 12 12
µ 2 2
¶
c a
=m +
12 12
V = abc = 0.0016m3 = 1,6l
kg
ρ = 1.4 → m = 2.24kg
l
Übungsblatt vom 3. 2. 2006 und 6. 2. 2006 6 c
°2005-2006 University of Ulm, Othmar Marti
Übungsblatt 13 PHYS 1100 Grundkurs I WH 2005-2006 7
m¡ 2 ¢
parallel zu b : I = a + c2 = 9.33 · 10−3 kgm2
12
m¡ 2 ¢
parallel zu c : I = a + b2 = 8.66 · 10−3 kgm2
12
m¡ 2 ¢
parallel zu a : I = b + c2 = 3.06 · 10−3 kgm2
12
4 −4
3. P1 = 0 cm P2 = 0 cm ω = 2πf = 20 · π
10 10
a)
³X ´
2
Lp = I · ω = mr · 20π · ez
kgm2
= 2 · m1 · (4cm)2 · 20π · ez = 0,01 · ez
s
b)
X
Ls = −ω · Ri (ri · mi )
= −20π · (R1 · m1 · 10cm + R2 · m1 · 10cm)
4 −4
= −200π · m1 · 0 + 0 = 0
0 0
c)
kgm2
L0 = Lp + Ls = Lp + 0 = 0,01 · ez
s
d)
m1 = 50g m2 = 100g
Übungsblatt vom 3. 2. 2006 und 6. 2. 2006 7 c
°2005-2006 University of Ulm, Othmar Marti
8 PHYS 1100 Grundkurs I WH 2005-2006 Übungsblatt 13
¡ ¢
Lp = I · ω = m1 r12 + 2m1 r22 · 20π · ez
kgm2
= 0,015 · ez
X s
Ls = −ω Ri (ri mi )
= −20π · (R1 · m1 · 10cm + R2 · 2 · m1 · 10cm)
40cm2 − 80cm2
= −20π · m1 · 0
0
kgm2
= 0,013 · ex
s
0,013
kgm2
L0 = Lp + Ls = 0
s
0,015
4. a)
y (z) = m · z
b/2 b
= ·z = ·z
c 2c
RRR 2 RRR 2 RRR 2
I= r dm = r ρdV = r ρdxdydz
In kartesischen Koordinaten mit diesen Achsenbezeichnungen (Drehung um
x-Achse!) ⇒
b
ZZZ Za Zc Z2c ·z
¡ ¢ ¡ ¢
I =ρ· y 2 + z 2 dxdydz =ρ · 2 y 2 + z 2 dxdydz
x=0 z=0 y=0
Z Z Z · ¸ 2cb ·z
¡ 2 2
¢ 1 3 2
=ρ·2 y + z adydz =2ρ · a y +z y dz
3 y=0
z y z
Z µ 3
¶ Z µ 3 ¶
1 b 3 2 b b 3 b 3
= 2ρ · a · · z +z · · z dz =2ρ · a · z + z dz
3 8c3 2c 24c3 2c
z z
· 3 ¸c µ 3 ¶
b 4 b 4 b 4 b 4
= 2ρ · a z + z =2ρ · a · c + c
96c3 8c z=0 96c3 8c
µ 3 3
¶ µ 2 ¶
b c bc 1 b c2
=ρ·a· + = ·ρ·a·b·c +
96 8 2 24 2
µ 2 2
¶
b c
=m· +
24 2
Übungsblatt vom 3. 2. 2006 und 6. 2. 2006 8 c
°2005-2006 University of Ulm, Othmar Marti
Übungsblatt 13 PHYS 1100 Grundkurs I WH 2005-2006 9
b) T ∼ φ gilt nur für kleine φ
T =r×F
= rs · m · g · sin φ
T = I · φ̈
⇒Bewegungsgleichung:
rs · m · g · sin φ = I · φ̈
c) Maximale Verkippung:
b
2 b
tan β = =
c 2c
b
β = arctan
2c
⇒
π b
φmax = − arctan
2 2c
d) linearisierte Differentielgleichung:
rs · m · g · sin φ = I · φ̈
1 −1 3 1 5
sin φ = ·φ+ φ + φ + ...
1! 3! 5!
⇒ Linearisierung (für kleine φ) :
sin φ = φ
rs · m · g · sin φ = I φ̈
|{z}
φ
rs · m · g · φ = I φ̈
rs · m · g
φ̈ − φ=0
| {z I }
ω2
φ̈ − ω 2 · φ = 0
Übungsblatt vom 3. 2. 2006 und 6. 2. 2006 9 c
°2005-2006 University of Ulm, Othmar Marti
10 PHYS 1100 Grundkurs I WH 2005-2006 Übungsblatt 13
e) Allgemeine Lösung: φ (t) = A · eωt + B · e−ωt
Anfangsbedingungen: φ (0) = 0
φ̇ (0) = 0
⇒ 0=A+B
0 = Aω − Bω
⇒ A=0 B=0
keine Bewegung!
labiles Gleichgewicht für diese Anfangsbedingungen
⇒ jetzt kleine Verkippung als Anfangsbed.
φ (0) = φ0 A + B = φ0
φ̇ (0) = 0 Aω − Bω = 0
⇒
φ0
A=B=
2
⇒
φ0 ¡ ωt ¢
φ (t) = e + e−ωt
2
= φ0 · cosh ωt
f) µ ¶
1 3 1 5
sin φ = φ − φ + φ ...
6 120
⇒ Differentialgleichung:
µ ¶
1 3
rs · m · g · φ − φ = I φ̈
6
µ ¶
2 1 3
φ̈ − ω φ − φ = 0
6
g) µ ¶
2 1
φ̈ − ω φ − φ3 =0
6
Ansatz:
φ (t) = φ1 (t) + φ2 (t)
= φ0 · cosh ωt + φ2 (t)
in Differentialgleichung:
µ ¶
2 ¨ 2 1 3
φ0 ω cosh ωt + φ2 (t) − ω φ0 cosh ωt + φ2 (t) − (φ0 cosh ωt + φ2 (t)) = 0
6
Übungsblatt vom 3. 2. 2006 und 6. 2. 2006 10 c
°2005-2006 University of Ulm, Othmar Marti
Übungsblatt 13 PHYS 1100 Grundkurs I WH 2005-2006 11
1
φ¨2 (t) − ω 2 φ2 (t) + ω 2 (φ0 cosh ωt + φ2 (t))3 = 0
6
oder mit Maple
5. Trägheitsmoment eines Würfels: I = 16 ma2
Abstand Schwerpunkte untere Würfel von x-Achse
³ a ´2 ³ a ´2 a2 a
+ = → x1 = √
2 2 2 2
Obere Würfel:
µ ¶ ³ a ´2 r
3a2 5 5
+ = a 2 → x2 = a ·
2 2 2 2
Trägheitsmoment aller 4 Würfel:
µ ¶2 Ã r !2
1 a 5
Ixx = ma2 · 4 + 2 · m √ +2·m· a
6 2 2
2 20
= ma2 + ma2 + 5ma2 = ma2
3 3
das gleiche Ergebnis erhält man mit:
Z ZZZ
2 2
Ixx = y + z dm = ρ y 2 + z 2 dxdydz
Integrationsgrenzen sind die Würfelkanten.
20
Aufgrund von Symmetrie: Iyy = Ixx = 3
ma2
µ ¶2
1 2 a
Izz = ma · 4 + m √ ·4
6 2
2 8
= ma2 + 2ma2 = ma2
3 3
Deviationsmomente:
Übungsblatt vom 3. 2. 2006 und 6. 2. 2006 11 c
°2005-2006 University of Ulm, Othmar Marti
12 PHYS 1100 Grundkurs I WH 2005-2006 Übungsblatt 13
Z ZZZ
Ixy =Iyx = − xydm = −ρ xydxdydz
a a a
Z Z Z Za Z0 Z0
= − ρ xydxdydz + xydxdydz
0 0 0 0 −a −a
Z2a Z0 Za Z2a Za Z0
+ xydxdydz + xydxdydz
a −a 0 a 0 −a
Za · 2
¸a Z0 · 2
¸0 Z0 · 2
¸a Za · 2
¸0
x x x x
= − ρa y dy + y dy + y dy + y dy
2 x=0 2 −a 2 0 2 −a
0 −a −a 0
Za Za
a2 a2
= − ρa ydy − ydy = 0
2 2
−a −a
Analog Ixz = Izx = 0 sowie Iyz = Izy = 0
6. Drehimpuls:
20
0 0
←→ 3
L = I · ω = 0 20
3
0 · ma2 · ω
0 0 203
ω 0 0 ω
1
ω1 = 0 ω2 = ω ω3 = 0 ω4 = √ 0
0 0 ω 2 ω
20
20
3
0 0 √
3 2
L1 = 0 ma2 ω L2 = 20
3
ma ω L3 = 0 ma ω L4 = 0 ma2 ω
2 2
8 20
0 0 3
√
3 2
⇒
1 10
E1 = L1 ω 1 = ma2 ω 2
2 3
10 2 2
E2 = ma ω
3
4 2 2
E3 = ma ω
3
20 1
√ √ µ ¶
1 2 2 3 2 2 1 2 2 10 4 7
E4 = ma ω 0 · 0 = ma ω + = ma2 ω 2
2 20
√ √1
2 3 3 3
3 2 2
Übungsblatt vom 3. 2. 2006 und 6. 2. 2006 12 c
°2005-2006 University of Ulm, Othmar Marti
Übungsblatt 13 PHYS 1100 Grundkurs I WH 2005-2006 13
7.
20
3
0 0
I= 0 20
3
0 ma2
8
0 0 3
Spur µ ¶
20 20 8
I= + + ma2 = 16ma2
3 3 3
Trägheitsellipsoid definiert durch:
e
u= p
I (e)
Längen der Halbachsen des Rotationsellipsoids:
1 1
a=b= q c= q
20 8
3
ma2 3
ma2
8. a) Schwerpunkt
` 1 ¡ ¢
xs = : Is = m a2 + `2
2 12
µ ¶2 µ 2 ¶
` m¡ 2 ¢ ` a 7 · `2
x = : I1 = a + `2 + m =m +
4 12 4 12 48
µ ¶2 µ ¶
4` m¡ 2 ¢ 3` a2 13 · `2
x= : I2 = a + `2 + m =m +
5 12 10 12 75
b) s
r
2π mgR I
ω= = → T = 2π
T I mgR
R: Abstand Schwerpunkt - Aufhängung
s ¡ s
2 2¢ a2 2
m a12 + 7`48 12
+ 7`
48
T1 = 2π = 4π
m · g · `/4 `·g
s ¡
2 2¢
10 a12 + 13`
75
T2 = 2π
3·`·g
Übungsblatt vom 3. 2. 2006 und 6. 2. 2006 13 c
°2005-2006 University of Ulm, Othmar Marti
Das könnte Ihnen auch gefallen
- " Quantenanalogien": Versuchsprotokoll Zum F-PraktikumDokument19 Seiten" Quantenanalogien": Versuchsprotokoll Zum F-PraktikumПавел Лалочкин50% (2)
- Grundlagen Der Physik I (Uni Ulm) Übung+Lösung06Dokument17 SeitenGrundlagen Der Physik I (Uni Ulm) Übung+Lösung06scribdreddNoch keine Bewertungen
- Grundlagen Der Physik I (Uni Ulm) Übung+Lösung12Dokument12 SeitenGrundlagen Der Physik I (Uni Ulm) Übung+Lösung12katbe12Noch keine Bewertungen
- FP Physik 12 13 FHDokument7 SeitenFP Physik 12 13 FHDanang KusnadiNoch keine Bewertungen
- Blatt 6Dokument3 SeitenBlatt 6Mambo JamboNoch keine Bewertungen
- Starke Abi Prüfung Physik 2022Dokument37 SeitenStarke Abi Prüfung Physik 2022huss eldNoch keine Bewertungen
- TM3 UebungsaufgabenDokument10 SeitenTM3 UebungsaufgabenHelmi DhaouadiNoch keine Bewertungen
- Physik - FSP-Prüfungsbeispiel 1Dokument14 SeitenPhysik - FSP-Prüfungsbeispiel 1Abdullah ChahineNoch keine Bewertungen
- Pep1 ws20 Blatt03Dokument2 SeitenPep1 ws20 Blatt03rene.delorenzoNoch keine Bewertungen
- Physik - FSP-Prüfungsbeispiel 2Dokument14 SeitenPhysik - FSP-Prüfungsbeispiel 2Abdullah ChahineNoch keine Bewertungen
- Grundlagen Der Physik I (Uni Ulm) Übung+Lösung09Dokument11 SeitenGrundlagen Der Physik I (Uni Ulm) Übung+Lösung09yaswa1Noch keine Bewertungen
- Grundlagen Der Physik I (Uni Ulm) Übung+Lösung02Dokument14 SeitenGrundlagen Der Physik I (Uni Ulm) Übung+Lösung02yaswa1Noch keine Bewertungen
- Peer Review 3Dokument3 SeitenPeer Review 3Gergely VörösNoch keine Bewertungen
- KlausurDokument1 SeiteKlausurLazić MilošNoch keine Bewertungen
- PS3 PDFDokument2 SeitenPS3 PDFLissy RattiNoch keine Bewertungen
- Ansys Ubung FEM SchrumpfsitzDokument17 SeitenAnsys Ubung FEM SchrumpfsitzmehdilaserNoch keine Bewertungen
- tm3 05hDokument9 Seitentm3 05hPatrick EllNoch keine Bewertungen
- TP2 Nachklausur 2021Dokument5 SeitenTP2 Nachklausur 2021WNoch keine Bewertungen
- TFP S1 50Dokument4 SeitenTFP S1 50Klaus BernerNoch keine Bewertungen
- P-Anhalt 2014 PDFDokument5 SeitenP-Anhalt 2014 PDFJason GeraldioNoch keine Bewertungen
- Ph1-Uebung 14 BonusübungDokument2 SeitenPh1-Uebung 14 BonusübungMambo JamboNoch keine Bewertungen
- Mathe KlausurDokument12 SeitenMathe KlausurAmelie Huber100% (1)
- Uebung 7Dokument9 SeitenUebung 7Shiny ShihNoch keine Bewertungen
- ProbeklausurDokument4 SeitenProbeklausurWNoch keine Bewertungen
- 2018-03-20-Klausur-Mechanik-B Mit LösungenDokument15 Seiten2018-03-20-Klausur-Mechanik-B Mit LösungenDong FengNoch keine Bewertungen
- Musterloesung - SoSe2012 KlausurDokument13 SeitenMusterloesung - SoSe2012 KlausurDavid AhouaNoch keine Bewertungen
- Maschinendynamik - Kapitel 5Dokument25 SeitenMaschinendynamik - Kapitel 5marburg1984Noch keine Bewertungen
- 07 Basistrafo Matrizen IIDokument8 Seiten07 Basistrafo Matrizen IIAdrian MüllerNoch keine Bewertungen
- Grundlagen Der Physik I (Uni Ulm) Übung+Lösung04Dokument14 SeitenGrundlagen Der Physik I (Uni Ulm) Übung+Lösung04scribdreddNoch keine Bewertungen
- Grundlagen Der Physik I (Uni Ulm) Übung+Lösung04Dokument14 SeitenGrundlagen Der Physik I (Uni Ulm) Übung+Lösung04yaswa1Noch keine Bewertungen
- Oekonometrie 8Dokument25 SeitenOekonometrie 8wobax54592Noch keine Bewertungen
- Aufg RUE 4 1718 PDFDokument4 SeitenAufg RUE 4 1718 PDFOdenbachNoch keine Bewertungen
- Ph. Abi AufgabenDokument115 SeitenPh. Abi Aufgabendmytromoskaliukof31Noch keine Bewertungen
- Blatt 7Dokument3 SeitenBlatt 7Mambo JamboNoch keine Bewertungen
- Eth Exam4Dokument33 SeitenEth Exam4Natan costaNoch keine Bewertungen
- UebungDokument27 SeitenUebungWedo S.Noch keine Bewertungen
- OTH RegensburgDokument1 SeiteOTH RegensburgNam HoàngNoch keine Bewertungen
- Ue4 2024Dokument3 SeitenUe4 2024Kas ZafNoch keine Bewertungen
- M10 PDFDokument10 SeitenM10 PDFMartin BeerNoch keine Bewertungen
- Schwing Ung SL EhreDokument9 SeitenSchwing Ung SL EhrenurettinNoch keine Bewertungen
- Grundlagen Der Physik I (Uni Ulm) Übung+Lösung08Dokument15 SeitenGrundlagen Der Physik I (Uni Ulm) Übung+Lösung08yaswa1Noch keine Bewertungen
- Abiturpruefung Mathematik Cas 2019 Pruefungsteil BDokument15 SeitenAbiturpruefung Mathematik Cas 2019 Pruefungsteil BPinaki SankarNoch keine Bewertungen
- Klausur Loesung1Dokument5 SeitenKlausur Loesung1Universität BielefeldNoch keine Bewertungen
- Uebung 2Dokument10 SeitenUebung 2Shiny ShihNoch keine Bewertungen
- Beitrag Zur Berechnung Von Orthotropen PlattenDokument7 SeitenBeitrag Zur Berechnung Von Orthotropen Plattencelestinodl736Noch keine Bewertungen
- Mittlere Temperaturdifferenz Und Wirkungsgrad in Mehrgangigen Rohrbundel-Warmeubertragern Mit Und Ohne UmlenksegmenteDokument6 SeitenMittlere Temperaturdifferenz Und Wirkungsgrad in Mehrgangigen Rohrbundel-Warmeubertragern Mit Und Ohne Umlenksegmenteagbas20026896Noch keine Bewertungen
- 15.aufgabe ProbeklausurDokument17 Seiten15.aufgabe Probeklausurabdo ZinneddineNoch keine Bewertungen
- Versuch M1Dokument11 SeitenVersuch M1business.ahmadialiNoch keine Bewertungen
- Zettel WS 2023 08Dokument2 SeitenZettel WS 2023 08影 ShadowZZZNoch keine Bewertungen
- Poly 2013Dokument28 SeitenPoly 2013AlieeNoch keine Bewertungen
- Musterpruefung PhysikDokument2 SeitenMusterpruefung PhysikHuy NguyễnNoch keine Bewertungen
- 01-Uebungsblatt PhysikB2Dokument1 Seite01-Uebungsblatt PhysikB2BbjjNoch keine Bewertungen
- Phy131 hs2022 Blatt8Dokument2 SeitenPhy131 hs2022 Blatt8Jerry CohenNoch keine Bewertungen
- Loes Klausur ws04 ADokument9 SeitenLoes Klausur ws04 AUniversität BielefeldNoch keine Bewertungen
- Übungen CFD - SS2014Dokument19 SeitenÜbungen CFD - SS2014bebelcireNoch keine Bewertungen
- Blatt 03Dokument1 SeiteBlatt 03Filbert Felix SutantoNoch keine Bewertungen
- PlattenDokument47 SeitenPlattenNameNoch keine Bewertungen
- Eth Exam5Dokument13 SeitenEth Exam5Natan costaNoch keine Bewertungen
- Journal of Approximation Theory and Applied Mathematics - 2014 Vol. 4: ISSN 2196-1581Von EverandJournal of Approximation Theory and Applied Mathematics - 2014 Vol. 4: ISSN 2196-1581Noch keine Bewertungen
- Ecqb PPL A 51 PfaDokument23 SeitenEcqb PPL A 51 Pfasc44Noch keine Bewertungen
- Physik 1Dokument193 SeitenPhysik 1Júlia Zelenka100% (1)
- German Mechanical EngineeringDokument255 SeitenGerman Mechanical Engineeringmaks123123Noch keine Bewertungen
- Zentraler Oszillator Und Raum Quanten MediumDokument91 SeitenZentraler Oszillator Und Raum Quanten Mediumvanvan9Noch keine Bewertungen