Das könnte Ihnen auch gefallen
- Aufgabensammlung ElektrotechnikDokument188 SeitenAufgabensammlung Elektrotechnikhafida hafoudaNoch keine Bewertungen
- Otto Föllinger RegelungstechnikDokument5 SeitenOtto Föllinger RegelungstechnikvisagantNoch keine Bewertungen
- Trilogie der Induktiven Bauelemente: Applikationshandbuch für EMV-Filter, getaktete Stromversorgungen & HF-SchalterVon EverandTrilogie der Induktiven Bauelemente: Applikationshandbuch für EMV-Filter, getaktete Stromversorgungen & HF-SchalterWürth ElektronikNoch keine Bewertungen
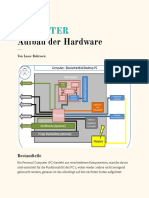
- Aufbau Eines ComputersDokument3 SeitenAufbau Eines ComputersLasse RohrssenNoch keine Bewertungen
- Skript GDR PDFDokument323 SeitenSkript GDR PDFvgnnr21esNoch keine Bewertungen
- ET1Dokument139 SeitenET1Јован АдамовNoch keine Bewertungen
- Konzept Ada Schein Pruefung deDokument8 SeitenKonzept Ada Schein Pruefung deFatih SariNoch keine Bewertungen
- Elektrische MesstechnikDokument303 SeitenElektrische MesstechnikLukaz JuarezNoch keine Bewertungen
- Hoch Und Höchstfrequenz Halbleiterschaltungen - Prof - ThummDokument191 SeitenHoch Und Höchstfrequenz Halbleiterschaltungen - Prof - ThummTho RaNoch keine Bewertungen
- KT PDFDokument599 SeitenKT PDFFabian Hafner100% (1)
- Skript GE2 2018 04 16 ADokument281 SeitenSkript GE2 2018 04 16 ANevenka TopicNoch keine Bewertungen
- Lexikon Kernenergie PDFDokument200 SeitenLexikon Kernenergie PDFMARA-BEANoch keine Bewertungen
- Vorlesungsskript WS09 10Dokument91 SeitenVorlesungsskript WS09 10HansNoch keine Bewertungen
- Werkstofftechnik Für ElektroberufeDokument20 SeitenWerkstofftechnik Für ElektroberufeSamKariNoch keine Bewertungen
- Simulink StateflowDokument514 SeitenSimulink StateflowRoger CruzNoch keine Bewertungen
- Teil Teil 1 Der Gesellenprüfung Prüfung 1 Bewertungsbogen Schriftliche Aufgabenstellung. Name - GesamtbearbeitungszeitDokument11 SeitenTeil Teil 1 Der Gesellenprüfung Prüfung 1 Bewertungsbogen Schriftliche Aufgabenstellung. Name - GesamtbearbeitungszeitLong Kiều ĐìnhNoch keine Bewertungen
- Haseborg Et Al 2023 Fit Für Die Prüfung ElektrotechnikDokument331 SeitenHaseborg Et Al 2023 Fit Für Die Prüfung ElektrotechnikKratzy CruzNoch keine Bewertungen
- Fuzzy-Regelung Grundlagen, Entwurf, Analyse by Dr. Kai Michels, Prof. Dr. Rudolf Kruse, Prof. Dr. Frank Klawonn, Dr. Andreas Nürnberger (Auth.)Dokument424 SeitenFuzzy-Regelung Grundlagen, Entwurf, Analyse by Dr. Kai Michels, Prof. Dr. Rudolf Kruse, Prof. Dr. Frank Klawonn, Dr. Andreas Nürnberger (Auth.)Xin Wu WuNoch keine Bewertungen
- 2020 Book KommunikationUndBildverarbeituDokument374 Seiten2020 Book KommunikationUndBildverarbeituJake MotaNoch keine Bewertungen
- Regelungstechnik 1Dokument312 SeitenRegelungstechnik 1eminNoch keine Bewertungen
- 11-Skript EMVDokument17 Seiten11-Skript EMVdirk13Noch keine Bewertungen
- Lernfeld 5 - 13 - LeseprobeDokument20 SeitenLernfeld 5 - 13 - LeseprobeLaki Lucijano0% (1)
- C Informatik Und C Skript Release 2 4 IOEDokument147 SeitenC Informatik Und C Skript Release 2 4 IOEHermann MayrNoch keine Bewertungen
- 01 Einführung Und GrundlagenDokument55 Seiten01 Einführung Und Grundlagen王培淋Noch keine Bewertungen
- KMK Maschbau 2004 WiSe14-15 - HannoverDokument66 SeitenKMK Maschbau 2004 WiSe14-15 - HannoverLaura FonsecaNoch keine Bewertungen
- Linie1 Wortliste KFZ-MechatronikerDokument7 SeitenLinie1 Wortliste KFZ-Mechatronikerdarapu100% (2)
- Formelsammlung MA1 Elektrotechnik TH KölnDokument8 SeitenFormelsammlung MA1 Elektrotechnik TH KölnjoshNoch keine Bewertungen
- RegelungstechnikDokument9 SeitenRegelungstechnikburakickinNoch keine Bewertungen
- Aufgaben Und Lösungen Zur Fachkunde Elektrotechnik: Europa-FachbuchreiheDokument10 SeitenAufgaben Und Lösungen Zur Fachkunde Elektrotechnik: Europa-FachbuchreihealadindejNoch keine Bewertungen
- Physik LösungenDokument34 SeitenPhysik Lösungenbl4ckpixelNoch keine Bewertungen
- Prüfungsvorbereitung Aktuell: Abschlussprüfung Teil 1 Abschlussprüfung Teil 2 MechatronikDokument20 SeitenPrüfungsvorbereitung Aktuell: Abschlussprüfung Teil 1 Abschlussprüfung Teil 2 MechatronikaladindejNoch keine Bewertungen
- KompensationDokument52 SeitenKompensationPier PaoloNoch keine Bewertungen
- Physikalische Grundlagen Der InformatikDokument98 SeitenPhysikalische Grundlagen Der InformatikLuki SetiariniNoch keine Bewertungen
- Die Fourier-Transformation in Der Signalverarbeitung Kontinuierliche Und Diskrete Verfahren Der Praxis Dr.-Ing. Dietmar Achilles 1978Dokument196 SeitenDie Fourier-Transformation in Der Signalverarbeitung Kontinuierliche Und Diskrete Verfahren Der Praxis Dr.-Ing. Dietmar Achilles 1978William VenegasNoch keine Bewertungen
- Quantencomputing Kompakt: Bettina JustDokument123 SeitenQuantencomputing Kompakt: Bettina JustBENNoch keine Bewertungen
- Aufgabensammlung Et1Dokument57 SeitenAufgabensammlung Et1冬凯Noch keine Bewertungen
- Das Kompendium Messtechnik und Sensorik in EinzelkapitelnVon EverandDas Kompendium Messtechnik und Sensorik in EinzelkapitelnNoch keine Bewertungen
- Lösungen MechnikDokument227 SeitenLösungen MechnikMiloud OmkorNoch keine Bewertungen
- ElekMeistPrV 2004 Industriemeister Fachrichtung ElektrotechnikDokument13 SeitenElekMeistPrV 2004 Industriemeister Fachrichtung ElektrotechnikLanaNoch keine Bewertungen
- Autodesk Inventor | Schritt für Schritt: CAD Konstruktion und FEM Simulation mit Autodesk Inventor für EinsteigerVon EverandAutodesk Inventor | Schritt für Schritt: CAD Konstruktion und FEM Simulation mit Autodesk Inventor für EinsteigerNoch keine Bewertungen
- SkriptDokument96 SeitenSkriptapi-3837423100% (1)
- Messtechnik PrüfungstrainerDokument368 SeitenMesstechnik PrüfungstraineraNoch keine Bewertungen
- Industriemeister Elektrotechnik IHKDokument4 SeitenIndustriemeister Elektrotechnik IHKEckert Schulen0% (2)
- Komplexe Rechnung in Der ElektrotechnikDokument25 SeitenKomplexe Rechnung in Der ElektrotechnikalexNoch keine Bewertungen
- Spektrumanalyse RauscherDokument112 SeitenSpektrumanalyse RauscherGdWTG100% (1)
- Technisches Zeichnen SkriptumDokument14 SeitenTechnisches Zeichnen SkriptumFranz HahnNoch keine Bewertungen
- Dahlander SchaltungDokument10 SeitenDahlander Schaltunget679j5gdw3659jjg100% (1)
- Fachkunde Elektrotechnik: Europa-FachbuchreiheDokument20 SeitenFachkunde Elektrotechnik: Europa-FachbuchreihealadindejNoch keine Bewertungen
- Leone2018 Book TheoretischeElektrotechnikDokument499 SeitenLeone2018 Book TheoretischeElektrotechnikنیما نمک چیانNoch keine Bewertungen
- EMV PraxisDokument32 SeitenEMV Praxismuralli@bol.com.brNoch keine Bewertungen
- Regelungstechnik PDFDokument402 SeitenRegelungstechnik PDFAsadKhalidNoch keine Bewertungen
- MATLAB Und Simulink in Der IngenieurpraxisDokument441 SeitenMATLAB Und Simulink in Der IngenieurpraxisIon PostolacheNoch keine Bewertungen
- (Klaus Schon (Auth.) ) Hochspannungsmesstechnik - GRDokument490 Seiten(Klaus Schon (Auth.) ) Hochspannungsmesstechnik - GREva Sb100% (1)
- Handbuch AbbDokument56 SeitenHandbuch AbbMensur SerdarevićNoch keine Bewertungen
- BKW Smart Grid SystematikDokument23 SeitenBKW Smart Grid SystematiksetekanNoch keine Bewertungen
- Elektrotechnik-Elektronik Grundwissen: Grundbildung Für ElektroberufeDokument23 SeitenElektrotechnik-Elektronik Grundwissen: Grundbildung Für ElektroberufeThierry ENGUESS0% (1)
- Kurzweil2012 Book PhysikAufgabensammlungFürIngenDokument215 SeitenKurzweil2012 Book PhysikAufgabensammlungFürIngenGlobal VisionNoch keine Bewertungen
- Formelsammlung ElektrotechnikDokument6 SeitenFormelsammlung ElektrotechnikjoeNoch keine Bewertungen
- Tet2 8.2.0 Elektromagnetische WellenDokument3 SeitenTet2 8.2.0 Elektromagnetische WellenMartin SNoch keine Bewertungen
- Tet2 8.3.0 Elektromagnetische WellenDokument2 SeitenTet2 8.3.0 Elektromagnetische WellenMartin SNoch keine Bewertungen
- Tet2 8.1.1 Elektromagnetische WellenDokument4 SeitenTet2 8.1.1 Elektromagnetische WellenMartin SNoch keine Bewertungen
- Tet2 8.1.3 Elektromagnetische WellenDokument3 SeitenTet2 8.1.3 Elektromagnetische WellenMartin SNoch keine Bewertungen
- Tet2 8.1.0 Elektromagnetische WellenDokument4 SeitenTet2 8.1.0 Elektromagnetische WellenMartin SNoch keine Bewertungen
- Tet2 8.4.0 Elektromagnetische WellenDokument3 SeitenTet2 8.4.0 Elektromagnetische WellenMartin SNoch keine Bewertungen
- MT2 Vorlesung 05 WiSe21-22Dokument19 SeitenMT2 Vorlesung 05 WiSe21-22Martin SNoch keine Bewertungen