Beruflich Dokumente
Kultur Dokumente
Spez KR 125-1 en
Hochgeladen von
Mindaugas RimkusOriginaltitel
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Spez KR 125-1 en
Hochgeladen von
Mindaugas RimkusCopyright:
Verfügbare Formate
Spezifikation Specification Spcification
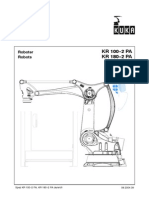
Roboter KR 125 KR 150
Robots KR 125 L100 KR 200
KR 125 L90
Spez KR 125, 150, 200 de/en/fr 03.96.00
2 Spez KR 125, 150, 200 de/en/fr 03.96.00
Deutsch Seite 3
English page 9
Franais page 15
Inhaltsverzeichnis
1 SYSTEMBESCHREIBUNG . . . . . 3 Zusatzlast 120 kg und KR 125 L90/1 mit Nennlast
1.1 Allgemeines . . . . . . . . . . . . . . . . . . . 3 90 kg, Zusatzlast 120 kg. Sie unterscheiden sich
1.2 Robotermechanik . . . . . . . . . . . . . . 4 vom KR 125/1 durch einen 200 mm bzw. 400 mm
1.3 Aufstellung . . . . . . . . . . . . . . . . . . . . 4 lngeren Arm.
1.4 Austausch . . . . . . . . . . . . . . . . . . . . 5 Fr den KR 150/1 mit Nennlast 150 kg und den KR
1.5 Transport . . . . . . . . . . . . . . . . . . . . . 5 200/1 mit Nennlast 200 kg wird eine maximale Zu-
satzlast von 95 kg bzw. 80 kg zugelassen.
2 ZUBEHR (Auswahl) . . . . . . . . . 6 Alle Grundkrper der beweglichen Hauptbau-
2.1 Roboterbefestigung . . . . . . . . . . . . 6 gruppen bestehen aus Leichtmetallgu. Dieses
2.2 Zustzliche Linearachse . . . . . . . . 6 Auslegungskonzept wurde im Hinblick auf wirt-
2.3 Integrierte Energiezufhrung fr schaftlichen Leichtbau und hohe Torsions-- und
Achse 1 . . . . . . . . . . . . . . . . . . . . . . 6 Biegefestigkeit CAD-- und FEM--optimiert. Hier-
2.4 Arbeitsbereichsberwachung . . . . 6 aus resultiert eine hohe Eigenfrequenz des Robo-
2.5 Arbeitsbereichsbegrenzung . . . . . 6 ters, der dadurch ein gutes dynamisches Verhal-
2.6 KTL--Justage--Set . . . . . . . . . . . . . . 6 ten mit hoher Schwingungssteifigkeit aufweist.
2.7 Riemenspannungs--Prfvorrichtung Gelenke und Getriebe bewegen sich weitgehend
fr Zentralhand . . . . . . . . . . . . . . . . 6 spielfrei, alle bewegten Teile sind abgedeckt. Alle
2.8 Fll-- und Prfeinrichtung fr Antriebsmotoren sind steckbare, brstenlose
Membranspeicher . . . . . . . . . . . . . . 6
AC--Servomotoren - wartungsfrei und sicher ge-
2.9 Freidrehvorrichtung fr gen berlastung geschtzt.
Roboterachsen . . . . . . . . . . . . . . . . 6
Die Grundachsen sind dauergeschmiert, d.h. ein
3 TECHNISCHE DATEN . . . . . . . . . 7 lwechsel ist erst nach 20.000 Betriebsstunden
erforderlich.
Abbildungen . . . . . . . . . . . . . . . . . 21--33 Alle Roboterkomponenten sind bewut einfach
und bersichtlich gestaltet, in ihrer Anzahl mini-
miert und durchweg leicht zugnglich. Der Robo-
1 SYSTEMBESCHREIBUNG ter kann auch als komplette Einheit schnell und
ohne wesentliche Programmkorrektur ausge-
1.1 Allgemeines tauscht werden. berkopfbewegungen sind mg-
lich.
Die Roboter KR 125/1, KR 150/1 und KR 200/1
(Bild 1--1) sind sechsachsige Industrieroboter mit Durch diese und zahlreiche weitere Konstruk-
Gelenkkinematik fr alle Punkt-- und Bahnsteue- tionsdetails sind die Roboter schnell und betriebs-
rungsaufgaben. Ihre Haupteinsatzgebiete sind sicher, wartungsfreundlich und wartungsarm. Sie
bentigen nur wenig Stellflche und knnen auf-
-- MIG/MAG--Schweien
-- YAG--Laserstrahlschweien grund der besonderen Aufbaugeometrie sehr
-- Punktschweien nahe am Werkstck stehen. Die durchschnittliche
-- Bearbeiten Lebensdauer liegt, wie bei allen KUKA--Robotern,
-- Handhaben bei 10 bis 15 Jahren.
-- Montieren Jeder Roboter wird mit einer Steuerung ausger-
-- Auftragen von Kleb--, Dicht-- und Konservie- stet, deren Steuer-- und Leistungselektronik in ei-
rungsstoffen. nem gemeinsamen Steuerschrank integriert sind
Sie knnen am Boden und an der Decke einge- (siehe gesonderte Spezifikation). Sie ist platzspa-
baut werden. rend, anwender-- und servicefreundlich. Der Si-
cherheitsstandard entspricht der EU--Maschinen-
Die Nenn--Traglast 125 kg an der Hand des KR richtlinie und den einschlgigen Normen (u.a. EN
125/1 und eine fr diese Nennlast maximale Zu- 775).
satzlast von 120 kg auf dem Roboterarm knnen
auch bei maximaler Armausladung mit Maximal- Die Verbindungsleitungen zwischen Roboter und
geschwindigkeit bewegt werden. Das gilt auch fr Steuerung enthalten alle hierfr notwendigen Ver-
die Varianten KR 125 L100/1 mit Nennlast 100 kg, sorgungs-- und Signalleitungen. Sie sind am Ro-
03.96.00 Spez KR 125, 150, 200 de/en/fr 3
boter steckbar, auch die Energie-- und Medienlei- 1.3 Aufstellung
tungen fr den Betrieb von Werkzeugen (Zubehr
Integrierte Energiezufhrung fr Achse 1). Fr die Aufstellung des Roboters gibt es mehrere
Diese Leitungen sind im Bereich der Grundachse Mglichkeiten:
1 fest im Inneren des Roboters installiert. Bei Be- -- Variante 1
darf knnen die Energie-- und Medienleitungen fr
den Betrieb von Werkzeugen mit Hilfe von Diese Variante ist mit Dbeln und Bohrplan als
Systemschnittstellen an den nachgeordneten Zubehr Bodenbefestigungssatz lieferbar.
Achsen entlang bis zum Werkzeug gefhrt wer- Der Roboter wird ohne Zwischenplatten auf
den. den vorbereiteten Hallenboden gesetzt und
mit acht Dbelschrauben festgeschraubt (Bild
1.2 Robotermechanik 1--4). Fr das Prparieren der Dbelbohrun-
gen ist ein Spezialwerkzeug mit Hinterschnitt-
Der Roboter besteht aus einem feststehenden einrichtung erforderlich.
Grundgestell, auf dem sich um eine senkrechte
-- Variante 2
Achse das Karussell mit Schwinge, Arm und
Hand dreht (Bild 1--1). Diese Variante ist mit Aufnahmebolzen und
Schrauben als Zubehr Gestellbefestigungs-
Die Hand (Bild 1--2) dient mit ihrem Anbauflansch satz lieferbar.
der Aufnahme von Werkzeugen (z.B. Greifer, Der Roboter wird auf eine vorbereitete Stahl-
Schweigert). konstruktion gesetzt und mit acht Schrauben
Die Bewegungsmglichkeiten der Roboterach- festgeschraubt (Bild 1--5). Seine Einbauposi-
sen gehen aus Bild 1--3 hervor. tion wird durch zwei Aufnahmebolzen be-
stimmt, was seine wiederholbare Austausch-
Die Traglast und das Eigengewicht der Gelenk- barkeit ermglicht.
komponenten werden durch ein in sich geschlos-
senes, hydropneumatisches Gewichtsaus- -- Variante 3
gleichssystem statisch weitgehend ausgeglichen. Diese Variante ist mit Zwischenplatten, Auf-
Es untersttzt die Achse 2. Seine Wirksamkeit nahmebolzen, Dbeln und Schrauben als Zu-
kann je nach Traglast und Zusatzlast des Einsatz- behr Fundamentbefestigungssatz lieferbar.
falles und je nach Einbaulage des Roboters Der Roboter wird mit vier Zwischenplatten
variiert werden. (Bild 1--6) auf den vorbereiteten Hallenboden
gesetzt. Seine Einbauposition wird durch zwei
Die Wegmessung fr die Grund-- und Handach-
Aufnahmebolzen bestimmt, was seine wieder-
sen (A1 bis A3 bzw. A4 bis A6) erfolgt ber ein ab-
holbare Austauschbarkeit ermglicht. Die Be-
solutes Wegmesystem mit einem Resolver fr
festigung des Roboters erfolgt mit acht
jede Achse.
Schrauben auf den Zwischenplatten.
Der Antrieb erfolgt durch transistorgesteuerte, Die Zwischenplatten werden vor dem Aufset-
trgheitsarme AC--Servomotoren. In die Motor- zen des Roboters mit je vier Dbelschrauben
einheiten sind Bremse und Resolver raumspa- am Hallenboden befestigt.
rend integriert.
Der Arbeitsbereich des Roboters wird in allen
Achsen ber Software--Endschalter begrenzt. ACHTUNG bei Variante 1 und 3:
Mechanisch werden die Arbeitsbereiche der Ach- Bei der Vorbereitung eines Fundamentes sind
sen 1, 2, 3 und 5 ber Endanschlge mit Puffer- die einschlgigen Bauvorschriften hinsicht-
funktion begrenzt. lich Betonqualitt ( B 25 nach DIN 1045) und
Tragfhigkeit des Untergrundes zu beachten.
Als Zubehr Arbeitsbereichsbegrenzung sind Bei der Anfertigung ist auf eine ebene und
fr die Achsen 1 bis 3 mechanische Anschlge fr ausreichend glatte Oberflche zu achten.
eine aufgabenbedingte Begrenzung des jeweili-
gen Arbeitsbereichs lieferbar. Das Einbringen der Dbel mu sehr sorgfltig
erfolgen, damit die whrend des Betriebes
auftretenden Krfte (Bild 1--7) sicher in den
Boden geleitet werden. Bild 1--7 kann auch fr
weitergehende statische Untersuchungen
herangezogen werden.
4 Spez KR 125, 150, 200 de/en/fr 03.96.00
1.4 Austausch 1.5 Transport
Bei Produktionsanlagen mit einer greren An- Beim Transport des Roboters ist auf die
zahl von Robotern ist die problemlose Austausch- Standsicherheit zu achten. Solange der Robo-
barkeit der Roboter untereinander von Bedeu- ter nicht auf dem Fundament befestigt ist,
tung. Sie wird gewhrleistet mu er in Transportstellung gehalten werden.
-- durch die Reproduzierbarkeit der werkseitig Der Roboter kann auf zweierlei Weise transpor-
markierten Synchronisationsstellungen aller tiert werden (Bild 1--8):
Achsen, der sogenannten mechanischen
a Mit Transportgeschirr und Kran (oder Gabel-
Null--Stellungen, und
stapler)
-- durch die rechneruntersttzte Nullpunktju- Der Roboter lt sich mit einem Transportge-
stage, schirr, das in drei sen am Karussell einge-
hngt wird, an den Kranhaken oder die Gabeln
und sie wird zustzlich begnstigt
des Staplers hngen und so transportieren.
-- durch eine fernab vom Roboter und vorweg
Fr den Transport des Roboters mittels Kran
durchfhrbare Offline--Programmierung sowie
drfen nur zugelassene Last-- und Hebege-
-- durch die reproduzierbare Aufstellung des Ro- schirre mit ausreichender Traglast verwendet
boters. werden.
Service-- und Wartungsarbeiten (u.a. die Hand b Mit Gabelstapler
und die Motoren betreffend) erfordern abschlie- Fr den Transport mit dem Gabelstapler sind
end die Herbeifhrung der elektrischen und der im Grundgestell zwei durchgehende Taschen
mechanischen Null--Stellung (Kalibrierung) des vorhanden. Dadurch kann der Roboter von
Roboters. Zu diesem Zweck sind werkseitig Me- zwei Seiten aufgenommen werden.
patronen an jeder Roboterachse angebracht. Fr die Befestigung an der Decke wird der Ro-
boter in einem speziellen Transportgestell hn-
Das Einstellen der Mepatronen ist Teil der Ver-
gend geliefert. Aus diesem kann er mit dem Ga-
messungsarbeiten vor Auslieferung des Robo-
belstapler bereits in richtiger Einbaulage
ters. Dadurch, da an jeder Achse immer mit der-
entnommen und weitertransportiert werden.
selben Patrone gemessen wird, erreicht man ein
Hchstma an Genauigkeit beim erstmaligen Vor jedem Transport mu der Roboter in Trans-
Vermessen und beim spteren Wiederaufsuchen portstellung gebracht werden:
der mechanischen Null--Stellung.
A1 A2 A3 A4 A5 A6
Fr das Sichtbarmachen der Stellung des in der
Mepatrone liegenden Tasters wird als Zubehr 0 --40 +58 0 +90 beliebig
ein elektronischer Metaster (KTL--Justage--Set)
auf die Mepatrone geschraubt. Beim berfahren
der Mekerbe whrend des Einstellvorgangs wird
das Wegmesystem automatisch auf elektrisch
Null gesetzt.
Nach vollzogener Nullpunkt--Einstellung fr alle
Achsen kann der Roboter wieder in Betrieb ge-
nommen werden.
Die geschilderten Vorgnge ermglichen es, da
die einmal festgelegten Programme jederzeit auf
jeden anderen Roboter desselben Typs bertra-
gen werden knnen.
03.96.00 Spez KR 125, 150, 200 de/en/fr 5
2 ZUBEHR (Auswahl) 2.5 Arbeitsbereichsbegrenzung
2.1 Roboterbefestigung Die Bewegungsbereiche der Achsen 1 bis 3 kn-
nen mit zustzlichen mechanischen Anschlgen
Die Befestigung des Roboters kann in drei Varian- aufgabenbedingt begrenzt werden:
ten erfolgen: Achse 1: von +5 bis +110 und --5 bis --110,
-- mit Bodenbefestigungssatz (Bild 1--4) in 15--Schritten einstellbar.
-- mit Gestellbefestigungssatz (Bild 1--5) Achse 2: von +48 bis --5,
-- mit Fundamentbefestigungssatz (Bild 1--6) in 15--Schritten einstellbar.
Beschreibung siehe Abschnitt 1.3. Achse 3: von 0 bis --150,
in 15--Schritten einstellbar.
2.2 Zustzliche Linearachse
2.6 KTL-- Justage-- Set
Mit Hilfe einer Lineareinheit als zustzliche Fahr-
achse auf der Basis der Baureihe KL 2000 (Bild Um eine fr alle Achsen notwendige Nullpunkt--
2--1) kann der Roboter translatorisch verfahren Einstellung durchzufhren, kann der zu einem
werden -- frei programmierbar, am Boden oder an KTL--Justage--Set gehrende elektronische Me-
der Decke. taster (Bild 2--3 und 3--8) verwendet werden. Er
erlaubt ein besonders schnelles, einfaches Mes-
sen sowie eine automatische, rechnergesttzte
Justage und sollte bei der Roboterbestellung mit-
2.3 Integrierte Energiezufhrung fr bestellt werden.
Achse 1
Es stehen verschiedene Energiezufhrungen zur
Verfgung, unter anderem fr die Applikationen 2.7 Riemenspannungs-- Prfvorrich-
Handhaben und Punktschweien. Die ent- tung fr Zentralhand
sprechenden Leitungen verlaufen im Bereich der
Achse 1 innerhalb des Roboters vom Steckerfeld ber einen Stel wird zur Prfung der Riemen-
bis zu einer Schnittstelle am Karussell (Bild 2--2). spannung eine reproduzierbare Mekraft auf den
Riemen aufgebracht und die Eindrcktiefe an ei-
Von dort knnen zustzliche Leitungen auen an ner Markierung geprft (Bild 2--4).
Schwinge und Arm entlang bis zu einer entspre-
chenden Schnittstelle am Werkzeug gefhrt wer-
den. Damit entfllt der raumaufwendige Versor-
gungsgalgen.
2.8 Fll-- und Prfeinrichtung fr
Membranspeicher
Mit diesem Zubehr (Bild 2--5) kann das geschlos-
2.4 Arbeitsbereichsberwachung sene Hydrauliksystem des Gewichtsausgleichs
fr Achse 2 verschiedenen Einbau-- und Traglast-
Die Achsen 1 bis 3 knnen mit Nherungsinitiato-
bedingungen angepat werden. Es besteht aus
renundNutenringen, aufdenenverstellbareNok-
Hydraulikpumpe, Speicherflleinrichtung und
ken befestigt sind, ausgerstet werden. Das er-
Verbindungsschluchen. Der zum Vorspannen
mglicht die stndige berwachung der des Gewichtsausgleichs notwendige Stickstoff
Roboterstellung. Ist Personenschutz erforderlich, kann in handelsblichen Gasflaschen bezogen
werden statt der Nherungsinitiatoren mechani-
werden.
sche Endschalter eingesetzt.
Bei A1 und A2 knnen maximal drei Sektoren, bei
A3 maximal zwei Sektoren des jeweiligen Bewe- 2.9 Freidrehvorrichtung fr Robo-
gungsbereichs berwacht werden.
terachsen
Werden die Achsen 2 oder 3 mit einer Arbeitsbe-
reichsberwachung ausgestattet, ist eine Ener- Mit dieser Vorrichtung kann der Roboter nach ei-
giezufhrung fr Achse 1 mit einer zustzlichen nem Strfall mechanisch ber die Antriebsmoto-
Steuerleitung erforderlich. ren bewegt werden.
6 Spez KR 125, 150, 200 de/en/fr 03.96.00
3 TECHNISCHE DATEN
Typen KR 125/1, KR 125 L100/1
KR 125 L90/1
KR 150/1
KR 200/1
Anzahl der Achsen 6 (Bild 1--3)
Lastgrenzen siehe auch Bild 3--1
Robotertyp KR 125/1 KR 125 L100/1 KR 125 L90/1 KR 150/1 KR 200/1
Hand (ZH)1 125 kg 125 kg 125 kg 150 kg 200 kg
Nenn--Traglast 125 100 90 150 200
[kg]
Zusatzlast bei 120 120 120 95 80
Nenn--Traglast
[kg]
Max. Gesamt- 245 220 210 245 280
last [kg]
Armlnge [mm] 1000 1200 1400 1000 1000
1 ZH = Zentralhand Traglastangriffspunkt P siehe Bild 3--2 bis 3--6
Die Abhngigkeit von Traglast und Lage des Trag- Fr alle Nennlasten betrgt der horizontale Ab-
lastangriffspunktes geht aus Bild 3--2 bis 3--6 her- stand des Traglastangriffspunktes P von der
vor. Flanschflche 210 mm; der vertikale Abstand von
der Drehachse 6 betrgt 230 mm (jeweils Nenn-
Achsdaten abstand).
Die Achsdaten werden auf der folgenden Seite
angegeben. Die Darstellung der Achsen und ihrer Besondere Betriebsstoffe
Bewegungsmglichkeiten geht aus Bild 1--3 her- Hydraulikl und Stickstoffgas in handelsblichen
vor. Grundachsen sind die Achsen 1 bis 3, Hand- Behltern fr das Nachfllen des Gewichtsaus-
achsen die Achsen 4 bis 6. gleichssystems bei einer nderung des System-
drucks.
Wiederholge- 0,2 mm
nauigkeit Arbeitsbereich (Arbeitsraum)
Antriebs- Elektro--mechanisch, mit tran- Form und Abmessungen des Arbeitsbereiches
system sistorgesteuerten AC--Servo- gehen aus Bild 3--9 hervor.
motoren
Arbeitsraumvolumen
Hauptabmes- siehe Bild 3--9
sungen Das Volumen des Arbeitsraumes betrgt fr
KR 125/1, KR 150/1 und KR 200/1 ca. 39 m3
Gewicht KR 125/1: 975 kg KR 125 L100/1 ca. 51 m3
KR 125 L100/1: 990 kg KR 125 L90/1 ca. 65 m3
KR 125 L90/1: 995 kg Bezugspunkt ist hierbei der Schnittpunkt der Ach-
KR 150/1: 1120 kg sen 4 und 5.
KR 200/1: 1120 kg
Umgebungstemperatur
Schallpegel < 75 dB (A) auerhalb des Ar- D bei Betrieb:
beitsbereiches 283 K bis 318 K (+10 C bis +45 C)
Einbaulage Boden oder Decke. Zulssiger D bei Lagerung und Transport:
Neigungswinkel 15 233 K bis 333 K (--40 C bis +60 C)
Andere Temperaturgrenzen auf Anfrage.
Aufstellung siehe Abschnitt 1.3
03.96.00 Spez KR 125, 150, 200 de/en/fr 7
KR 125/1 Installierte Motorleistung 19,8 kW
KR 125 L100/1
Schutzart der Robotermechanik IP64
KR 125 L90/1 (nach IEC 529)
D Zentralhand, Nenn--Traglast 125 kg betriebsbereit, mit angeschlossenen
Verbindungsleitungen
Achse Bewegungsbereich Geschwindig-
softwarebegrenzt keit Farbe
1 185 100 /s Futeil (feststehend) schwarz (RAL 9005).
Bewegliche Teile orange (RAL 2003).
2 +93 100 /s
bis Gewichtsausgleich schwarz (RAL 9005).
--40 Sonderlackierungen auf Anfrage.
3 +58 Anbauflansch an Achse 6
bis 100 /s
--210 Der Anbauflansch wird in DIN/ISO--Ausfhrung1
geliefert (Bild 3--7).
4 350 154 /s Schraubenqualitt fr Werkzeuganbau 10.9
5 120 167 /s Klemmlnge min. 1,5 x d
6 350 251 /s
HINWEIS: Das dargestellte Flanschbild ent-
spricht der Null--Stellung des Robo-
KR 150/1 ters in allen Achsen, besonders auch
D Zentralhand, Nenn--Traglast 150 kg in Achse 6 (Symbol zeigt dabei die
Lage des jeweiligen Pass--Ele-
Achse Bewegungsbereich Geschwindig- mentes).
softwarebegrenzt keit
1 185 76 /s 1 DIN/ISO 9409--1--A160
2 +93 76 /s
bis
--40
3 +58
bis 76 /s
--210
4 350 118 /s
5 120 128 /s
6 350 168 /s
KR 200/1
D Zentralhand, Nenn--Traglast 200 kg
Achse Bewegungsbereich Geschwindig-
softwarebegrenzt keit
1 185 76 /s
2 +93 76 /s
bis
--40
3 +58
bis 76 /s
--210
4 350 97 /s
5 120 106 /s
6 350 113 /s
8 Spez KR 125, 150, 200 de/en/fr 03.96.00
Deutsch Seite 3
English page 9
Franais page 15
Contents
1 SYSTEM DESCRIPTION . . . . . . . 9 rated payload, 120 kg supplementary load. They
1.1 General . . . . . . . . . . . . . . . . . . . . . . 9 differ from the KR 125/1 in their arm, which is 200
1.2 Robot mechanics . . . . . . . . . . . . . . 10 mm and 400 mm longer respectively.
1.3 Installation . . . . . . . . . . . . . . . . . . . . 10 For the KR 150/1 with 150 kg rated payload and
1.4 Interchangeability . . . . . . . . . . . . . . 11 the KR 200/1 with 200 kg rated payload, a
1.5 Transportation . . . . . . . . . . . . . . . . . 11 maximum supplementary load of 95 kg and 80 kg
respectively is allowed.
2 ACCESSORIES (selection) . . . . 12 All the main bodies of the moving principal
2.1 Robot installation . . . . . . . . . . . . . . 12 assemblies are made of cast light alloy. This
2.2 Additional linear axis . . . . . . . . . . . 12 design concept has been optimized by means of
2.3 Integrated energy supply for axis 1 12 CAD and FEM with regard to cost--effective
2.4 Working range monitoring . . . . . . . 12 lightweight construction and high torsional and
2.5 Working range limitation . . . . . . . . 12 flexural rigidity. As a result, the robot has a high
2.6 KTL adjustment set . . . . . . . . . . . . 12 natural frequency and is thus characterized by
2.7 Belt tension checking device good dynamic performance with high resistance
for in--line wrist . . . . . . . . . . . . . . . . 12 to vibration.
2.8 Filling and testing equipment for The joints and gears are virtually free from
diaphragm accumulator . . . . . . . . . 12 backlash; all moving parts are covered. All the
2.9 Release device for robot axes . . . 12 axes are powered by brushless AC servomotors
of plug--in design, which require no maintenance
3 TECHNICAL DATA . . . . . . . . . . . . 13 and offer reliable protection against overload.
Figures . . . . . . . . . . . . . . . . . . . . . . 21--33 The main axes are lifetime--lubricated, i.e. an oil
change is necessary only every 20,000 operating
hours.
1 SYSTEM DESCRIPTION All the robot components are of intentionally
simple and straightforward configuration; the
1.1 General number of them has been minimized and they are
all readily accessible. The robot can also be
The KR 125/1, KR 150/1 and KR 200/1 robots quickly replaced as a complete unit without any
(Fig. 1--1) are six--axis industrial robots with major program corrections being required.
articulated kinematics for all point--to--point and Overhead motion is possible.
continuous--path controlled tasks. Their main
areas of application are These and numerous other design details make
the robots fast, reliable and easy to maintain, with
-- MIG/MAG welding minimal maintenance requirements. They occupy
-- YAG laser beam welding very little floor space and can be located very
-- spot welding close to the workpiece on account of the special
-- machining structural geometry. Like all KUKA robots, they
-- handling have an average service life of 10 to 15 years.
-- assembly
-- application of adhesives, sealants and Each robot is equipped with a controller, whose
preservatives. control and power electronics are integrated in a
They are designed for installation on the floor or common cabinet (see separate specification).
ceiling. The controller is compact, user--friendly and easy
to service. It conforms to the safety requirements
The rated payload of 125 kg on the wrist and a specified in the EU machinery directive and the
maximum supplementary load (for this rated relevant standards (including EN 775).
payload) of 120 kg on the robots arm can be
moved at maximum speed even with the arm fully The connecting cables between the robot and the
extended. This also applies to the variants KR 125 controller contain all the relevant energy supply
L100/1 with 100 kg rated payload, 120 kg and signal lines. The cable connections on the
supplementary load, and KR 125 L90/1 with 90 kg robot are of the plug--in type, as too are the energy
03.96.00 Spez KR 125, 150, 200 de/en/fr 9
and fluid supply lines for the operation of end 1.3 Installation
effectors (accessory integrated energy supply for
axis 1). These lines are permanently installed There are several possible methods of installing
inside main axis 1 of the robot and can be routed the robot:
along the downstream axes to the end effector -- Variant 1
with the aid of system interfaces if required.
This variant is available with dowels and drilling
1.2 Robot mechanics plan as the floor mounting kit accessory.
The robot is placed onto the prepared shop
The robot consists of a fixed base frame, on which floor without intermediate plates and fastened
the rotating column turns about a vertical axis by means of eight dowel bolts (Fig. 1--4). A
together with the link arm, arm and wrist (Fig. special tool with backing--off attachment is
1--1). required for preparing the dowel boreholes.
The wrist (Fig. 1--2) is provided with a mounting -- Variant 2
flange for the attachment of end effectors (e.g. This variant is available with locating pins and
grippers, welding tools). bolts as the frame mounting kit accessory.
The possible movements of the robot axes are The robot is placed on a prepared steel
depicted in Figure 1--3. construction and fastened with eight bolts (Fig.
1--5). Its position of installation is fixed by
The payload and the dead weight of the articulated means of two locating pins, enabling it to be
components are statically compensated to a large exchanged in a repeatable manner.
extent by a closed hydropneumatic
counterbalancing system, which assists axis 2. Its -- Variant 3
effect can be varied depending on the payload and This variant is available with intermediate
supplementary load of the particular application plates, locating pins, dowels and bolts as the
and on the installation position of the robot. mounting base kit accessory.
The robot is mounted together with four
The positions of the main and wrist axes (A1 to A3
intermediate plates (Fig. 1--6) on the prepared
and A4 to A6) are sensed by means of an absolute
shop floor. Its position of installation is fixed by
position sensing system featuring a resolver for
means of two locating pins, enabling it to be
each axis.
exchanged in a repeatable manner. The robot
Each axis is driven by a transistor--controlled, is fastened to the intermediate plates with eight
low--inertia AC servomotor. The brake and bolts.
resolver are space--efficiently integrated into the Each of the intermediate plates is fastened to
motor unit. the shop floor with four dowel bolts before the
robot is mounted on them.
The working range of the robot is limited by means
of software limit switches on all axes. The working
ranges of axes 1, 2, 3 and 5 are mechanically IMPORTANT with regard to variants 1 and 3:
limited by end stops with a buffer function. When preparing the foundation, the pertinent
construction specifications regarding the
Mechanical stops for the application--specific grade of concrete ( B 25 according to DIN
limitation of the respective working ranges of axes 1045) and the load bearing capacity of the
1 to 3 are available as the working range ground must be observed. It must be ensured
limitation accessory. that the surface of the foundation is level and
sufficiently smooth.
The insertion of the dowels must be carried
out with great care to ensure that the forces
occurring during operation (Fig. 1--7) will be
safely transmitted to the ground. Figure 1--7
can also be used as a basis for more extensive
static investigations.
10 Spez KR 125, 150, 200 de/en/fr 03.96.00
1.4 Interchangeability 1.5 Transportation
In manufacturing systems with a large number of It must be ensured that the robot is stable
robots, it is important for the robots to be readily while it is being transported. The robot must
interchangeable. This is ensured by remain in its transport position as long as it is
not fastened to the foundation.
-- the reproducibility of the synchronization
positions marked by the manufacturer on all There are two methods of transporting the robot
axes, the so--called mechanical zero positions, (Fig. 1--8):
and
a With lifting tackle and crane (or fork lift truck)
-- the computer--aided zero adjustment The robot can be suspended from the hook of
procedure, a crane or the fork of a fork lift truck by means
of lifting tackle attached to three eyelets on the
and is additionally supported by
rotating column.
-- off--line programming, which can be carried out
Only approved lifting tackle with an adequate
in advance and remotely from the robot, and
carrying capacity may be used for
-- the reproducible installation of the robot. transporting the robot by crane.
After service and maintenance work (on the wrist b With fork lift truck
and motors, for example), it is necessary to For transport by fork lift truck, two slots are
establish coincidence between the electrical and provided in the base frame, allowing the robot
mechanical zero positions (calibration) of the to be picked up from either of two sides.
robot. A gage cartridge is mounted by the For installation on the ceiling, the robot is
manufacturer on each robot axis for this purpose. delivered inverted in a special transport frame,
out of which it can be taken with a fork lift truck,
These gage cartridges are set by the
already in the correct orientation, and brought
manufacturer when the robot is calibrated prior to
to the site of installation.
shipment. The fact that measurements on each
axis are always made using the same cartridge Before being transported, the robot must be
means that maximum accuracy is achieved both brought into its transport position:
when first calibrating the mechanical zero position
and when subsequently relocating it. A1 A2 A3 A4 A5 A6
The position of the mechanical probe fitted in the 0 --40 +58 0 +90 any
gage cartridge can be displayed by screwing an
electronic probe (KTL adjustment set), available
as an accessory, onto the cartridge. The position
sensing system is automatically set to electrical
zero when the probe passes the reference notch
during the adjustment procedure.
The robot can resume operation once the zero
adjustment has been carried out on all axes.
The procedures described make it possible for the
programs, once defined, to be transferred at any
time to any other robot of the same type.
03.96.00 Spez KR 125, 150, 200 de/en/fr 11
2 ACCESSORIES (selection) 2.5 Working range limitation
2.1 Robot installation The movement ranges of axes 1 to 3 can be
limited by means of additional mechanical stops
There are three variants available for installing the as required by the application.
robot: Axis 1: from +5 to +110 and --5 to --110,
-- with floor mounting kit (Fig. 1--4) adjustable in 15 steps.
-- with frame mounting kit (Fig. 1--5) Axis 2: from +48 to --5,
-- with mounting base kit (Fig. 1--6) adjustable in 15 steps.
Axis 3: from 0 to --150,
See Section 1.3 for a description. adjustable in 15 steps.
2.2 Additional linear axis
2.6 KTL adjustment set
With the aid of a linear unit as an additional
traversing axis, based on the KL 2000 series (Fig. The zero adjustment operation, which is
2--1), the robot can be moved translationally. The necessary for all axes, can be performed with the
axis is freely programmable and can be installed aid of the electronic probe belonging to a KTL
on the floor or the ceiling. adjustment set (Fig. 2--3 and 3--8). This probe
provides a particularly fast and simple means of
measurement and allows automatic,
2.3 Integrated energy supply for computer--aided adjustment. It should be included
in the order for the robot.
axis 1
Various energy supply systems are available,
including systems for the applications handling 2.7 Belt tension checking device for
and spot welding. In the area of axis 1, the in-- line wrist
necessary supply lines run inside the robot from
the plug connection panel to an interface on the For the purpose of checking the belt tension, a
rotating column (Fig. 2--2). reproducible test force is applied to the belt by
means of a plunger and the deflection is checked
From here, supply lines can additionally be routed
in relation to a mark (Fig. 2--4).
externally along the link arm and arm to an
appropriate interface on the end effector. This
eliminates the need for a space--consuming
supply boom. 2.8 Filling and testing equipment
for diaphragm accumulator
With these accessories (Fig. 2--5), the closed
2.4 Working range monitoring hydraulic system for counterbalancing axis 2 can
Axes 1 to 3 can be equipped with proximity be matched to various installation and payload
switches and slotted rings to which adjustable conditions. The equipment consists of a hydraulic
cams are attached. This allows the position of the pump, an accumulator filling device and
robot to be continuously monitored. If personnel connecting hoses. The nitrogen required for
protection is required, mechanical limit switches priming the counterbalancing system can be
are used instead of proximity switches. purchased in standard commercial gas cylinders.
Up to three sectors of the movement range can be
monitored on axes 1 and 2, and up to two sectors
on axis 3. 2.9 Release device for robot axes
If axes 2 and 3 are equipped with working range This device can be used to move the robot
monitoring, an energy supply system for axis 1 mechanically via the drive motors after a
with an additional control cable is required. malfunction.
12 Spez KR 125, 150, 200 de/en/fr 03.96.00
3 TECHNICAL DATA
Types KR 125/1, KR 125 L100/1
KR 125 L90/1
KR 150/1
KR 200/1
Number of axes 6 (Fig. 1--3)
Load limits also see Fig. 3--1
Robot type KR 125/1 KR 125 L100/1 KR 125 L90/1 KR 150/1 KR 200/1
Wrist (IW)1 125 kg 125 kg 125 kg 150 kg 200 kg
Rated payload 125 100 90 150 200
[kg]
Supplementary 120 120 120 95 80
load with rated
payload [kg]
Max. total dis- 245 220 210 245 280
tributed load
[kg]
Arm length 1000 1200 1400 1000 1000
[mm]
1 IW = in--line wrist Point of payload application P see Figures 3--2
to 3--6
The relationship between the payload and its point
of application may be noted from Figures 3--2 to For all rated payloads, the horizontal distance of
3--6. the point of payload application P from the face of
the mounting flange is 210 mm and the vertical
Axis data distance from rotational axis 6 is 230 mm (nominal
The axis data may be noted from the next page. distance in each case).
The axes and their possible motions are depicted
in Figure 1--3. Axes 1 to 3 are the main axes, axes Special consumables
4 to 6 the wrist axes. Hydraulic oil and nitrogen gas in standard
commercial containers for recharging the
Repeatability 0.2 mm counterbalancing system when the system
pressure is altered.
Drive system electromechanical, with tran-
sistor--controlled brushless AC Working envelope
servomotors
The shape and dimensions of the working
Principal see Figure 3--9 envelope may be noted from Figure 3--9.
dimensions
Working volume
Weight KR 125/1: 975 kg The volume of the working envelope is as follows:
KR 125 L100/1: 990 kg KR 125/1, KR 150/1, KR 200/1 approx. 39 m3
KR 125 L90/1: 995 kg KR 125 L100/1 approx. 51 m3
KR 150/1: 1120 kg KR 125 L90/1 approx. 65 m3
KR 200/1: 1120 kg
The reference point is the intersection of axes 4
Sound level < 75 dB (A) outside the working and 5.
envelope
Ambient temperature
Mounting floor or ceiling, permissible an- D During operation:
position gle of inclination 15 283 K to 318 K (+10 C to +45 C)
Installation see Section 1.3 D During storage and transportation:
233 K to 333 K (--40 C to +60 C)
Other temperature limits available on request.
03.96.00 Spez KR 125, 150, 200 de/en/fr 13
KR 125/1 Installed motor capacity 19.8 kW
KR 125 L100/1
Protection classification IP 64
KR 125 L90/1 of the manipulator
D In--line wrist, rated payload 125 kg (according to IEC 529)
ready for operation,
Axis Range of motion Speed with connecting cables plugged in
software--limited
Colors
1 185 100 /s
Base (stationary): black (RAL 9005).
2 +93 100 /s
to Moving parts: orange (RAL 2003).
--40 Counterbalancing system: black (RAL 9005).
Special colors available on request.
3 +58
to 100 /s Mounting flange on axis 6
--210
The robot is fitted with a DIN/ISO mounting
4 350 154 /s flange1 (Fig. 3--7).
5 120 167 /s Screw grade for attaching end effector 10.9
Minimum screw grip 1.5 x d
6 350 251 /s
NOTE: The flange is depicted with all axes of
KR 150/1 the robot, particularly axis 6, in the
D In--line wrist, rated payload 150 kg zero position (the symbol
indicates the position of the locating
Axis Range of motion Speed element).
software--limited
1 185 76 /s 1 DIN/ISO 9409--1--A160
2 +93 76 /s
to
--40
3 +58
to 76 /s
--210
4 350 118 /s
5 120 128 /s
6 350 168 /s
KR 200/1
D In--line wrist, rated payload 200 kg
Axis Range of motion Speed
software--limited
1 185 76 /s
2 +93 76 /s
to
--40
3 +58
to 76 /s
--210
4 350 97 /s
5 120 106 /s
6 350 113 /s
14 Spez KR 125, 150, 200 de/en/fr 03.96.00
Deutsch Seite 3
English page 9
Franais page 15
Table des matires
1 DESCRIPTION DU SYSTME . . 15 La charge nominale admissible de 125 kg au
1.1 Gnralits . . . . . . . . . . . . . . . . . . . 15 poignet du KR 125/1 et une charge supplmen-
1.2 Ensemble mcanique du robot . . 16 taire maxi de 120 kg pour cette charge nominale
1.3 Mise en place . . . . . . . . . . . . . . . . . 16 admissible au bras du robot peuvent tre dpla-
1.4 Echange . . . . . . . . . . . . . . . . . . . . . . 17 ces la vitesse maxi et la porte maxi du bras.
Ceci sapplique galement aux variantes
1.5 Transport . . . . . . . . . . . . . . . . . . . . . 17
KR 125 L100/1 avec une charge nominale de 100
kg et une charge supplmentaire de 120 kg et au
2 ACCESSOIRES (slection) . . . . 18 KR 125 L90/1 avec une charge nominale de 90 kg
2.1 Fixation du robot . . . . . . . . . . . . . . . 18 et une charge supplmentaire de 120 kg. Ils se
2.2 Axe linaire supplmentaire . . . . . 18 distinguent du KR 125/1 par un bras plus long de
2.3 Alimentation en nergie intgre 200 mm ou 400 mm.
pour laxe 1 . . . . . . . . . . . . . . . . . . . 18
2.4 Surveillance de lenveloppe Pour le KR 150/1 avec une charge nominale de
dvolution . . . . . . . . . . . . . . . . . . . . 18 150 kg et le KR 200/1 avec une charge nominale
2.5 Limitation de lenveloppe de 200 kg, on autorise une charge supplmentaire
dvolution . . . . . . . . . . . . . . . . . . . . 18 maxi de 95 kg respectivement 80 kg.
2.6 Set de rglage KTL . . . . . . . . . . . . 18 Tous les carters des sous--ensembles principaux
2.7 Dispositif de contrle de la tension mobiles sont en fonte dalliage lger. Ce concept
de courroie pour le poignet a encore t optimis avec la CFAO et la mthode
en ligne . . . . . . . . . . . . . . . . . . . . . . 18 des lments finis quant aux critres suivants:
2.8 Appareils de remplissage et construction rentable lgre et rsistance impor-
de contrle pour rservoir tante la torsion ainsi qu la flexion. Il en rsulte
membrane . . . . . . . . . . . . . . . . . . 18
donc une frquence propre trs importante du ro-
2.9 Dispositif de libration des axes bot caractris ainsi par un excellent comporte-
de robot . . . . . . . . . . . . . . . . . . . . . . 18
ment dynamique avec une haute rsistance aux
vibrations.
3 CARACTERISTIQUES
TECHNIQUES . . . . . . . . . . . . . . . . 19 Les articulations, les joints et les mcanismes de
transmission sont caractriss par un mouve-
Figures . . . . . . . . . . . . . . . . . . . . . . 21--33 ment pratiquement sans jeu. Toutes les pices
mobiles sont recouvertes. Tous les moteurs den-
tranement sont des servomoteurs AC sans balais
1 DESCRIPTION DU SYSTME enfichables ne ncessitant aucune maintenance
et protgs dune manire fiable contre la sur-
1.1 Gnralits charge.
Les axes majeurs sont graisss vie, c..d.
Les robots KR 125/1, KR 150/1 et KR 200/1 (fig.
quune vidange dhuile nest indispensable qua-
1--1) sont robots industriels six axes cinma-
prs 20 000 heures de service.
tique articule pouvant tre mis en uvre pour
toutes les tches avec positionnement en continu Tous les composants du robot ont t conus
(contournage) et point par point. Les principaux sciemment dune manire simple et claire. Leur
domaines de mise en uvre sont nombre a t minimis. Tous les composants sont
-- le soudage MIG/MAG aisment accessibles. Le robot pourra galement
-- le coupage au rayon laser YAG tre chang rapidement en tant quunit
-- le soudage par points complte sans que ceci suppose une correction
-- lusinage importante du programme. Un basculement en ar-
-- le manutention rire est galement possible.
-- le montage Ce point ainsi que de nombreux autres dtails
-- lapplication de colles, produits de conserva- constructifs confrent au robot une fiabilit et une
tion et dtanchification. rapidit trs importantes ainsi quune trs grande
Ils sont prvus pour le montage au sol ou au pla- facilit de maintenance. Lencombrement nces-
fond, cest----dire montage suspendu. sit est trs faible. Vue la gomtrie particulire
03.96.00 Spez KR 125, 150, 200 de/en/fr 15
des superstructures, les robots peuvent tre mon- mcaniquement par des butes avec fonction
ts proximit de la pice. A linstar des robots in- tampon.
dustriels prouvs des autres sries KUKA, la du-
Des butes mcaniques pour une limitation de
re de vie moyenne slve 10--15 ans.
lenveloppe dvolution en fonction du cas dap-
Chaque robot est dot dune commande. Les plication sont disponibles comme accessoire Li-
lectroniques de commande et de puissance sont mitation de lenveloppe dvolution pour les axes
intgres dans une armoire de commande com- 1 3.
mune (voir spcification spciale). Cette com-
mande a un encombrement rduit, prsente une 1.3 Mise en place
grande simplicit de maintenance et autorise une
Il existe plusieurs possibilits pour la mise en
conduite aise du systme. Le niveau de scurit
place du robot:
rpond la Directive Machines CE et aux normes
en vigueur (entre autres EN 775). -- Variante 1
Les cbles de liaison entre le robot et la com- Cette variante est fournie avec des chevilles et
mande contiennent toutes les lignes dalimenta- un gabarit comme accessoire Kit de fixation
tion et de signaux ncessaires cet effet. Elles au sol.
sont enfichables sur le robot. Ceci sapplique Le robot est pos sur le sol du hall prpar en
galement aux cbles dnergie et des fluides consquence sans travailler avec des plaques
pour lexploitation des outils (accessoire Ali- intermdiaires pour tre viss avec huit vis
mentation en nergie intgre pour laxe 1). Dans cheville (fig. 1--4). Pour prparer les trous pour
la zone de laxe majeur 1, ces cbles sont fixs et les chevilles, il faut un outil spcial avec dispo-
poss lintrieur du robot. En cas de besoin, les sitif de contredpouille.
cbles dnergie et des fluides pour le fonctionne- -- Variante 2
ment des outils peuvent tre poss jusqu loutil
le long des axes secondaires en travaillant avec Cette variante avec des pieds de centrage et
des interfaces systme. des vis est fournie comme accessoire Kit de
fixation de lembase.
1.2 Ensemble mcanique du robot Le robot est pos sur une construction en acier
prpare pour tre viss avec huit vis (fig.
Le robot est form dune embase fixe sur laquelle 1--5). Sa position de montage est dfinie par
tourne autour dun axe vertical le bti de rotation deux pieds de centrage pour permettre ainsi
qui supporte lpaule, le bras et le poignet (fig. une rptabilit de lchange.
1--1). -- Variante 3
La bride de fixation du poignet (fig. 1--2) permet de Cette variante est fournie avec des plaques in-
monter les outils (par exemple prhenseurs, ap- termdiaires, des pieds de centrage, des che-
pareils de soudage). villes et des vis comme accessoire Kit de fixa-
La figure 1--3 reprsente les mouvements pos- tion aux fondations.
sibles des axes du robot. Le robot est pos avec quatre plaques inter-
mdiaires sur le sol du hall prpar (fig. 1--6).
La charge utile et le poids mort des composants Sa position de montage est dfinie par deux
articuls sont compenss statiquement dans la pieds de centrage pour permettre ainsi une r-
mesure du possible par un systme dquilibrage ptabilit de lchange. La fixation du robot se
hydropneumatique ferm en soi. Ce systme as- fait avec huit vis sur les plaques intermdi-
siste laxe 2. Son efficacit pourra tre varie en aires.
fonction de la charge utile et de la charge suppl- Avant la mise en place du robot, les plaques in-
mentaire du cas dapplication en question et en termdiaires sont fixes aux fondations avec
fonction de la position de montage du robot. respectivement quatre vis chevilles.
La mesure de la position pour les axes majeurs et
les axes mineurs (A1 A3 et A4 A6) se fera par ATTENTION.-- Dans le cas des variantes 1 et 3,
un systme de mesure absolu de la position avec il faudra, lors de la prparation des fonda-
un rsolveur pour chaque axe. tions, respecter les prescriptions de
Lentranement se fera par des servomoteurs AC construction en vigueur en ce qui concerne la
commands par transistors et faible inertie. Le qualit du bton ( B 25 selon norme DIN 1045)
frein et le rsolveur sont intgrs dune faon peu et la portance du sol. Lors de lexcution des
encombrante dans les units actionneurs. fondations, veiller obtenir une surface de ni-
veau suffisamment plane et lisse.
Lenveloppe dvolution du robot est limite dans
tous les axes par des fins de course logiciels. Len- La fixation des chevilles doit se faire avec une
veloppe dvolution des axes 1, 2, 3 et 5 est limite minutie extrme pour que les forces engen-
16 Spez KR 125, 150, 200 de/en/fr 03.96.00
dres lors de lexploitation du robot (fig. 1--7) 1.5 Transport
soient fiablement introduites dans le sol. La
figure 1--7 peut galement tre utilise pour La stabilit doit tre prise en compte lors du
des tudes statiques plus pousses. transport du robot. Tant que le robot nest pas
fix aux fondations, il doit rester en position
de transport.
1.4 Echange
Le robot peut tre transport de deux manires
Dans le cas des installations de production com- (fig. 1--8):
prenant un certain nombre de robots, il faut garan-
tir que lchange des robots entre eux ne pose au- a Avec dispositif de transport et une grue (ou un
cun problme. Ceci est obtenu de la manire chariot lvateur fourches)
suivante: Le robot est transport avec le dispositif de
transport accroch aux trois illets du bti de
-- reproductibilit des positions de synchronisa- rotation, aux crochets de la grue ou aux four-
tion repres lusine pour tous les axes, ches du chariot lvateur.
c..d. de la position zro mcanique, et
Pour le transport du robot avec une grue, on
-- calibration du point zro assiste par ordina- ne peut travailler quavec des dispositifs de
teur. levage et de charge autoriss pour une charge
Lchange est en outre favoris par: suffisante.
-- une programmation autonome ou offline pou- b Avec chariot lvateur fourches
vant non seulement se faire auparavant mais Pour le transport avec le chariot lvateur
encore distance du robot, et fourches, lembase est dote de deux poches
traversantes. Le robot peut ainsi tre saisi des
-- la mise en place reproductible du robot. deux cts.
Les travaux de maintenance et de service aprs- Pour la fixation au plafond, le robot est livr ac-
vente (entre autres poignet et moteurs) nces- croch dans un dispositif de transport spcial.
sitent que lon obtienne la position zro tant mca- Il peut tre retir de ce dispositif avec un chariot
nique qulectrique (calibration) du robot. A cette lvateur fourches dj en position de mon-
fin, les cartouches de mesure sont prvues dpart tage correcte et transport.
usine pour chaque axe du robot. Avant chaque transport, le robot doit tre amen
Le rglage des cartouches de mesure fait partie en position de transport:
des oprations de mesure qui prcdent la livrai-
son du robot. Comme on mesure toujours avec la A1 A2 A3 A4 A5 A6
mme cartouche chaque axe, on obtient une 0 --40 +58 0 +90 quelconque
prcision maximale non seulement lors de la pre-
mire mesure mais encore lors des recherches ul-
trieures de la position zro mcanique.
Pour signaler la position du palpeur dans la car-
touche, on visse comme accessoire un mesureur
lectronique (set de rglage KTL) sur la car-
touche. Lorsquon passe ainsi par lencoche de r-
frence lors du rglage, le systme de mesure est
automatiquement rgl sur une position lec-
trique zro.
Le robot peut tre remis en service aprs avoir r-
gl le point zro pour tous les axes.
Grce ces oprations, les programmes dtermi-
ns ainsi peuvent tout moment tre transfrs
nimporte quel autre robot du mme type.
03.96.00 Spez KR 125, 150, 200 de/en/fr 17
2 ACCESSOIRES (slection) 2.5 Limitation de lenveloppe
dvolution
2.1 Fixation du robot
Les plages de dplacement des axes 1 3
La fixation du robot peut se faire selon trois varian- peuvent tre limites en fonction du cas dapplica-
tes: tion avec des butes mcaniques supplmen-
-- avec kit de fixation au sol (fig. 1--4) taires:
-- avec kit de fixation de lembase (fig. 1--5) Axe 1: de +5 +110 et --5 --110,
-- avec kit de fixation aux fondations (fig. 1--6) rglable par pas de 15.
Axe 2: de +48 --5
Description voir paragraphe 1.3.
rglable par pas de 15.
Axe 3: de 0 --150,
rglable par pas de 15.
2.2 Axe linaire supplmentaire
A laide dune unit linaire chariot comme axe de
dplacement supplmentaire sur la base de la s- 2.6 Set de rglage KTL
rie KL 2000 (fig. 2--1), le robot peut faire lobjet
dune translation, programmable, au sol ou au pla- Afin de raliser un rglage du point zro nces-
fond. saire pour tous les axes, on peut utiliser un mesu-
reur lectronique (fig. 2--3 et 3--8) qui fait partie du
set de rglage KTL. Ce mesureur lectronique au-
torise un mesurage particulirement simple et ra-
2.3 Alimentation en nergie int- pide ainsi quun rglage automatique assist par
gre pour laxe 1 ordinateur. Il devrait tre command avec le ro-
bot.
Diverses alimentations en nergie sont dispo-
nible, entre autres pour les applications Manu-
tention et Soudage par points. Les cbles et les
flexibles correspondants sont poss, dans la zone 2.7 Dispositif de contrle de la ten-
de laxe 1, dans le robot, du panneau de raccorde- sion de courroie pour le poignet
ment jusqu une interface au bti de rotation (fig. en ligne
2--2).
Une force de mesure reproductible est obtenue
Des cbles et flexibles supplmentaires peuvent
pour la courroie avec un poussoir pour vrifier la
tre ensuite poss lextrieur sur lpaule et le
tension de courroie et la profondeur denfonce-
bras jusqu une interface correspondante de lou-
ment de la courroie avec un repre (fig. 2--4).
til. La potence dalimentation trs encombrante
est donc inutile.
2.8 Appareils de remplissage et de
2.4 Surveillance de lenveloppe contrle pour rservoir mem-
dvolution brane
Les axes 1 3 peuvent recevoir des dtecteurs de Ces accessoires (fig. 2--5) permettent dadapter le
proximit et des bagues rainures sur lesquelles systme dquilibrage hydraulique ferm de laxe
sont fixes des cames rglables afin dobtenir une 2 aux diverses positions de montage et charges
surveillance permanente de la position du robot. admissibles. Ces appareils sont: une pompe hy-
Si une protection des personnes est indispensa- draulique, un dispositif de remplissage du rser-
ble, on travaille avec des fins de course mca- voir et des flexibles de connexion. Lazote indis-
niques la place des dtecteurs de proximit. pensable pour la tension initiale du systme
dquilibrage peut tre tir de bouteilles couram-
Dans le cas des axes 1 et 2, on peut contrler au ment en vente dans le commerce.
maximum trois secteurs et dans le cas de laxe 3
au maximum deux secteurs des plages de d-
placement en question.
2.9 Dispositif de libration des axes
Si les axes 2 ou 3 sont dots dune surveillance de de robot
lenveloppe dvolution, il faut une Alimentation
dnergie pour laxe 1 avec un cble de com- Ce dispositif permet, aprs une panne, de d-
mande supplmentaire. placer mcaniquement le robot avec les moteurs
dentranement.
18 Spez KR 125, 150, 200 de/en/fr 03.96.00
3 CARACTERISTIQUES
TECHNIQUES
Types KR 125/1, KR 125 L100/1
KR 125 L90/1
KR 150/1
KR 200/1
Nombre daxes 6 (fig. 1--3)
Charge admissible Cf. galement fig. 3--1
Type de robot KR 125/1 KR 125 L100/1 KR 125 L90/1 KR 150/1 KR 200/1
Poignet (PL)1 125 kg 125 kg 125 kg 150 kg 200 kg
Charge nomi- 125 100 90 150 200
nale admissible
[kg]
Charge suppl- 120 120 120 95 80
mentaire pour
charge nomi-
nale admissible
[kg]
Charge maxi 245 220 210 245 280
totale [kg]
Longueur du 1000 1200 1400 1000 1000
bras [mm]
1
Niveau < 75 dB (A) lextrieur du
PL = poignet en ligne
sonore volume de travail
Les figures 3--2 3--6 fournissent la relation entre Position de Sol ou plafond. Angle dinclinai-
la charge admissible et la position du point dap- montage son autoris 15.
plication de la charge.
Caractristiques des axes Mise en voir paragraphe 1.3
place
Les caractristiques des axes sont donnes sur la
page suivante. La figure 1--3 fournit une repr-
sentation des axes ainsi que des mouvements Point dapplication de la charge P voir fig. 3--2
que ceux--ci sont en mesure deffectuer. Les axes 3--6
majeurs sont les axes 1 3 et les axes du poignet Pour toutes charges nominales, lcart horizontal
sont les axes mineurs 4 6. du point dapplication de la charge P la surface
de la bride slve 210 mm et lcart vertical de
Rptabilit 0,2 mm laxe de rotation 6 est de 230 mm (resp. cart
nominal).
Systme lectromcanique avec servo-
dentrane- moteurs AC commands par Matires consommables spciales
ment transistors
Huile hydraulique et azote dans des rcipients
Dimensions voir fig. 3--9 courants pour remplir le systme dquilibrage
principales dans le cas dune variation de la pression
systme.
Poids KR 125/1: 975 kg
KR 125 L100/1: 990 kg Enveloppe de travail (volume de travail)
KR 125 L90/1: 995 kg
KR 150/1: 1120 kg La forme et les dimensions de lenveloppe de tra-
KR 200/1: 1120 kg vail sont donnes dans la figure 3--9.
03.96.00 Spez KR 125, 150, 200 de/en/fr 19
Volume de travail KR 200/1
Le volume de travail est pour D Poignet en ligne, charge utile de 200 kg
KR 125/1, KR 150/1 et KR 200/1 env. 39 m3
KR 125 L100/1 env. 51 m3 Axe Plage de Vitesse
KR 125 L90/1 env. 65 m3 mouvements
Le point de rfrence est ce faisant le point din- limitation logiciel
tersection des axes 4 et 5. 1 185 76 /s
Temprature ambiante 2 +93 76 /s
D En service: --40
283 K 318 K (+10 C +45 C)
3 +58
D Pour stockage et transport: 76 /s
233 K 333 K (--40 C +60 C) --210
Autres limites de temprature sur demande. 4 350 97 /s
5 120 106 /s
KR 125/1
6 350 113 /s
KR 125 L100/1
KR 125 L90/1
D Poignet en ligne, charge utile de 125 kg Puissance moteur installe 19,8 kW
Axe Plage de Vitesse Type de protection de lensemble
mouvements mcanique du robot IP64
limitation logiciel (selon IEC 529)
1 185 100 /s Oprationnel, avec cbles
de liaison connects
2 +93 100 /s
Coloris
--40
Embase (fixe): noir (RAL 9005).
3 +58 Pices en mouvement: orange (RAL 2003).
100 /s
Systme dequilibrage: noir (RAL 9005).
--210
Peintures spciales sur demande.
4 350 154 /s
5 120 167 /s Bride de fixation laxe 6
6 350 251 /s La bride de fixation livre rpond la version DIN/
ISO1 (fig. 3--7).
Qualit des vis pour le montage des outils 10.9
KR 150/1 Longueur de serrage min. 1,5 x d
D Poignet en ligne, charge utile de 150 kg
REMARQUE.-- La figure de la bride correspond
Axe Plage de Vitesse la position zro du robot sur tous les
mouvements axes et notamment sur laxe 6 (le
limitation logiciel symbole montre la position de
llment dadaptation respectif).
1 185 76 /s
2 +93 76 /s
1 DIN/ISO 9409--1--A160
--40
3 +58
76 /s
--210
4 350 118 /s
5 120 128 /s
6 350 168 /s
20 Spez KR 125, 150, 200 de/en/fr 03.96.00
1 Hand
2 Arm
3 Schwinge
4 Gewichtsausgleichssystem
5 Karussell
6 Grundgestell
1 Wrist
2 Arm
3 Link arm
4 Counterbalancing system
5 Rotating column
6 Base frame
1 Poignet
2 Bras
3 Epaule
4 Systme dquilibrage
5 Bti de rotation
6 Embase
1--1 Hauptbestandteile des Roboters
Principal components of the robot
Sous--ensembles principaux du robot
1--2 Zentralhand (ZH) 125/150/200 kg
1--3 Drehachsen und Drehsinn beim Verfahren
des Roboters
In--line wrist (IW) 125/150/200 kg
Poignet en ligne (PL) 125/150/200 kg Rotational axes and directions of rotation in
motion of the robot
Axes de rotation du robot et sens de rotation
lors du dplacement des axes
03.96.00 Spez KR 125, 150, 200 de/en/fr 21
Prfma
Test dimension
Cote de contrle
Mitte A1
devant
front
vorn
A1 center
Centre A1
1 Dbelschraube
2 Roboter
1 Dowel bolt
2 Robot
1 Vis cheville
2 Robot
1--4 Roboterbefestigung, Variante 1
Installation of the robot, variant 1
Fixation du robot, variante 1
22 Spez KR 125, 150, 200 de/en/fr 03.96.00
min. 870
790 0.1
5 780
1 220
vorn, front, devant
8x
max. 320
(M24)
| 1| A| B
390
M24
Mitte A1
A1 center
(20 H7)
H7
Centre A1
(2x)
2
M8
(2x)
min. 920
min.336
max. 690
20
220
220
10
(M8)
( 20 H7 )
A B
830
max. 640
3 min.115
220
1 Sechskantschraube
2 Aufnahmebolzen
3 Roboter
1 Hexagon screw
2 Locating pin
3 Robot
1 Vis tte hexagonale
2 Pied de centrage
3 Robot
1--5 Roboterbefestigung, Variante 2
Installation of the robot, variant 2
Fixation du robot, variante 2
03.96.00 Spez KR 125, 150, 200 de/en/fr 23
Mindestbohrlochtiefe
Minimum depth
Profondeur min.
devant
front
vorn
Mitte A1
A1 center
Centre A1
1 Zwischenplatte ohne Aufnahmebolzen 1 Intermediate plate without locating pin 1 Plaque intermdiaire sans pied de centrage
2 Zwischenplatte mit Aufnahmebolzen 2 Intermediate plate with locating pin 2 Plaque intermdiaire avec pied de centrage
3 Aufnahmebolzen 3 Locating pin 3 Pied de centrage
4 Schraube 4 Bolt 4 Vis
5 Dbelschraube 5 Dowel bolt 5 Vis cheville
6 Roboter 6 Robot 6 Robot
1--6 Roboterbefestigung, Variante 3
Installation of the robot, variant 3
Fixation du robot, variante 3
24 Spez KR 125, 150, 200 de/en/fr 03.96.00
Fv = Vertikale Kraft Fvmax = 15 600 N
Fh = Horizontale Kraft Fhmax = 11 650 N
Mk = Kippmoment Mkmax = 27 000 Nm
Mr = Drehmoment um Achse 1 Mrmax = 13 000 Nm
Fv = vertical force Fvmax = 15 600 N
Fh = horizontal force Fhmax = 11 650 N
Mk = tilting moment Mkmax = 27 000 Nm
Mr = turning moment about axis 1 Mrmax = 13 000 Nm
Fv = Force verticale Fvmax = 15 600 N
Fh = Force horizontale Fhmax = 11 650 N
Mk = Moment de basculement Mkmax = 27 000 Nm
Mr = Moment de rotation
autour de laxe 1 Mrmax = 13 000 Nm
Gesamtmasse = Roboter + Gesamtlast fr Typ
Total mass robot total load for type
Masse totale robot charge totale pour type
975 kg + 245 kg KR 125/1
990 kg + 220 kg KR 125 L100/1
995 kg + 210 kg KR 125 L90/1
1120 kg + 245 kg KR 150/1
1120 kg + 280 kg KR 200/1
1--7 Hauptbelastungen des Bodens
durch Roboter und Gesamtlast
Principal loads acting on floor due to robot
and total load
Sollicitations principales au niveau du sol
dues au robot et la charge totale
1--8 Transport des Roboters
Transporting the robot
Transport du robot
03.96.00 Spez KR 125, 150, 200 de/en/fr 25
2--4 Riemenspannungs--Prfvorrichtung
Belt tension checking device
Dispositif de contrle de la ten-
sion de courroie
2--1 Zustzliche Linearachse
Additional linear axis
Axe linaire supplmentaire
2--5 Fll-- und Prfeinrichtung
Filling and testing equipment
Appareils de remplissage et de contrle
1 Steuerleitung 23x1 + 2x1 mm2, geschirmt Max. Gesamtlast
2 Druckluftleitung 1/2
Total distributed load
3 Anschlu fr zweite Steuerleitung
Charge totale maxi
1 Control cable 23x1 + 2x1 mm2, shielded
2 Compressed air 1/2
3 Connection for second control cable
Zusatzlast
Traglast
1 Cble de commande 23x1 + 2x1 mm2, blind
Supplementary
2 Flexible dair comprim 1/2 Payload
3 Connexion pour deuxime cble de commande load
Charge supplmentaire Charge nominale
2--2 Energiezufhrung A1, Handhaben
Energy supply system A1, handling
Alimentation en enrgie A1,
manutention
2--3 Elektronischer Metaster fr KTL--
Justage--Set
Electronic probe for KTL adjust-
ment set
Mesureur lectronique pour set de
3--1 Lastverteilung
Distribution of the total load
rglage KTL Distribution de la charge
26 Spez KR 125, 150, 200 de/en/fr 03.96.00
ACHTUNG: IMPORTANT: ATTENTION:
Diese Belastungskennlinien These loading characteris- Les courbes de charge
entsprechen der uersten tics correspond to the maxi- reprsentent la capacit de
Belastbarkeit! Ein ber- mum load capacity. Exceed- charge maximum! Un
schreiten geht in die Lebens- ing this capacity will reduce dpassement de cette
dauer des Gertes ein, ber- the service life of the robot capacit rduit la dure de vie
lastet im allgemeinen Moto- and generally overload the du robot et, en rgle gnrale,
ren und Getriebe und bedarf motors and gears; in any surcharge les moteurs ainsi
auf alle Flle der Rck- such case KUKA must be que les engrenages et
sprache mit KUKA. consulted beforehand. transmissions. Il faudra en
tous cas consulter KUKA
auparavant.
Traglast Eigentrgheitsmoment Is *
m fr KR 125/1
1000 210 Lx Payload Motor moment of inertia Is *
m for KR 125/1
Charge Moment dinertie propre Is *
A4 A5 A6 nominale pour KR 125/1
m [kg] [kg m2]
Ly
125 17.5
P 115 16.1
105 14.7
95 13.3
85 11.9
75 10.5
65 9.1
L y [mm] 55 7.7
600 * Eigentrgheitsmoment der Traglast,
bezogen auf die durch den Schwerpunkt
der Traglast gehende Drehachse.
* Motor moment of inertia of the pay-
m=55
500 load, referred to the rotational axis pass-
ing through the center of gravity of the
m=65
payload.
m=75 * Moment dinertie propre de la charge
400 nominale, rapport laxe de rotation
Nominal distance
m=85
passant par le centre de gravit de la
Ecart nominal
Nennabstand
m=95
charge.
m=105
m=115
300 m=125
230
200
100
KR 125
100 200 300 400 500 600 700 800 L x [mm]
210
Nennabstand
Nominal distance
Ecart nominal
3--2 Traglastangriffspunkt P und Belastungskennlinien fr KR 125/1
Point of payload application P and loading characteristics for KR 125/1
Point dapplication de la charge P et courbes de charge pour KR 125/1
03.96.00 Spez KR 125, 150, 200 de/en/fr 27
Traglast Eigentrgheitsmoment Is *
m fr KR 125 L100/1
1200 210 Lx Payload Motor moment of inertia Is *
m for KR 125 L100/1
Charge Moment dinertie propre Is *
A4 A5 A6
nominale pour KR 125 L 100/1
m [kg] [kg m2]
Ly
Ly[mm]
100 14.0
600 P 92 12.7
84 11.5
76 9.8
500
m=44 68 8.8
60 7.8
m=52
52 6.6
44 5.6
Nominal distance
m=60
400
m=68
Ecart nominal
Nennabstand
m=76
* Eigentrgheitsmoment der Traglast,
m=84 bezogen auf die durch den Schwerpunkt
m=92 der Traglast gehende Drehachse.
300 m=100 * Motor moment of inertia of the pay-
load, referred to the rotational axis pass-
230 ing through the center of gravity of the
200 payload.
* Moment dinertie propre de la charge
nominale, rapport laxe de rotation
passant par le centre de gravit de la
100
charge.
KR 125 L100/1
100 200 300 400 500 600 700 800 L x [mm]
210 Nennabstand
Nominal distance
Ecart nominal
3--3 Traglastangriffspunkt P und Belastungskennlinien fr KR 125 L100/1
Point of payload application P and loading characteristics for KR 125 L100/1
Point dapplication de la charge P et courbes de charge pour KR 125 L100/1
Traglast Eigentrgheitsmoment Is *
m fr KR 125 L90/1
Payload Motor moment of inertia Is *
1400 210 Lx
m for KR 125 L90/1
Ly [mm] Charge Moment dinertie propre Is *
A4 A5 A6 nominale pour KR 125 L 90/1
600 m [kg] [kg m2]
Ly
m=41 90 12.5
500
83 11.4
P
Nominal distance
m=48 76 9.8
Ecart nominal
m=55 69 9.2
Nennabstand
400 m=62 62 8.1
m=69
m=76 55 7.0
300 m=83 48 6.1
m=90
41 5.2
230
200 * Eigentrgheitsmoment der Traglast,
bezogen auf die durch den Schwerpunkt
der Traglast gehende Drehachse.
100 * Motor moment of inertia of the pay-
load, referred to the rotational axis pass-
KR 125 L100/1 L x [mm] ing through the center of gravity of the
payload.
100 200 300 400 500 600 700 800 * Moment dinertie propre de la charge
Nennabstand nominale, rapport laxe de rotation
210 Nominal distance passant par le centre de gravit de la
Ecart nominal charge.
3--4 Traglastangriffspunkt P und Belastungskennlinien fr KR 125 L90/1
Point of payload application P and loading characteristics for KR 125 L90/1
Point dapplication de la charge P et courbes de charge pour KR 125 L90/1
28 Spez KR 125, 150, 200 de/en/fr 03.96.00
1000 210 Lx Traglast Eigentrgheitsmoment Is *
m fr KR 150/1
Payload Motor moment of inertia Is *
A4 A5 A6 m for KR 150/1
Charge Moment dinertie propre Is *
Ly
nominale pour KR 150/1
m [kg] [kg m2]
Ly [mm] P
150 22.0
600 140 20.5
130 19.1
120 17.6
500
m=80 110 16.1
100 14.7
m=90
90 13.2
m=100 80 11.7
Nominal distance
400
m=110
Ecart nominal
* Eigentrgheitsmoment der Traglast,
Nennabstand
m=120
m=130
bezogen auf die durch den Schwerpunkt
m=140 der Traglast gehende Drehachse.
300 m=150 * Motor moment of inertia of the pay-
load, referred to the rotational axis pass-
230 ing through the center of gravity of the
200 payload.
* Moment dinertie propre de la charge
nominale, rapport laxe de rotation
passant par le centre de gravit de la
100
KR 150/1 charge.
100 200 300 400 500 600 700 800 Lx [mm
210 Nennabstand
Nominal distance
Ecart nominal
3--5 Traglastangriffspunkt P und Belastungskennlinien fr KR 150/1
Point of payload application P and loading characteristics for KR 150/1
Point dapplication de la charge P et courbes de charge pour KR 150/1
Traglast Eigentrgheitsmoment Is *
m fr KR 200/1
Payload Motor moment of inertia Is *
1000 210 Lx m for KR 200/1
Ly [mm] Charge Moment dinertie propre Is *
nominale pour KR 200/1
600 A4 A5 A6 m [kg] [kg m2]
Ly
m=80 200 28.0
500
185 25.9
Nominal distance
m=100 P 170 23.8
Ecart nominal
155 21.7
Nennabstand
m=120
400 m=140 140 19.6
m=155
m=170 120 16.8
300 m=185 100 14.0
m=200
80 11.2
230
200 * Eigentrgheitsmoment der Traglast,
bezogen auf die durch den Schwerpunkt
der Traglast gehende Drehachse.
100 * Motor moment of inertia of the pay-
KR 200/1 load, referred to the rotational axis pass-
L x [mm] ing through the center of gravity of the
payload.
100 200 300 400 500 600 700 800 * Moment dinertie propre de la charge
Nennabstand nominale, rapport laxe de rotation
210 Nominal distance passant par le centre de gravit de la
Ecart nominal charge.
3--6 Traglastangriffspunkt P und Belastungskennlinien fr KR 200/1
Point of payload application P and loading characteristics for KR 200/1
Point dapplication de la charge P et courbes de charge pour KR 200/1
03.96.00 Spez KR 125, 150, 200 de/en/fr 29
210
bis/to/ A4/A5
1 Mepatrone A4
2 Mepatrone A6
3 Mepatrone A5
1 Gage cartridge A4
2 Gage cartridge A6
3 Gage cartridge A5
1 Cartouche de mesure A4
2 Cartouche de mesure A6
3 Cartouche de mesure A5
3--7 DIN/ISO--Anbauflansch fr ZH 125/150/200 kg
DIN/ISO mounting flange for IW 125/150/200 kg
Bride de fixation DIN/ISO pour PL 125/150/200 kg
30 Spez KR 125, 150, 200 de/en/fr 03.96.00
155
166
108
17 161
Fr die Nullpunkt--Einstellung mit dem elektronischen Metaster (siehe Abschnitt 2.6) bei angebautem
Werkzeug mu dieses so gestaltet sein, da gengend Platz fr Ein-- und Ausbau des Metasters bleibt.
For zero adjustment with the electronic probe (see Section 2.6) when the tool is mounted, the latter must
be designed to allow sufficient space for installation and removal of the probe.
Pour le rglage du point zro avec le palpeur de mesure lectronique (voir par. 2.6) lorsque loutil est
mont, il faut quil soit tel quon ait encore de la place suffisante pour le montage et le dmontage du palpeur.
3--8 Elektronischer Metaster, Anbau an A4, A5 und A6
Electronic probe, installation on A4, A5 and A6
Palpeur de mesure lectronique, montage sur A4, A5 et A6
03.96.00 Spez KR 125, 150, 200 de/en/fr 31
Zusatzlast
Z Supplementary load
Charge supplmentaire
Ausgleichsmasse A3 fr 150 kg und 200 kgTraglast. x 210
Counterweight A3 for 150 kg und 200 kg payload.
Masse dquilibrage A3 pour charge utile de 150 kg
et 200 kg.
45
1000
A
B
1910
865
R720
475 410
188
E D
F C
---185
+185
HINWEIS: Zusatzlast--Schwerpunkt mu
im Bereich der A3 liegen. Bezugspunkt fr
den Arbeitsbereich ist der Schnittpunkt der
Achsen 4 und 5.
NOTE: The center of gravity of the supple-
A B C D E F X mentary load must be located near A3. The
reference point for the working envelope is
KR 125/1 2866 3054 2410 1405 1005 1234 1000 the intersection of axes 4 and 5.
KR 125 L100/1 3066 3454 2610 1525 1085 1434 1200 REMARQUE.-- Centre de gravit de la
KR 125 L90/1 3266 3854 2810 1603 1207 1634 1400 charge utile supplmentaire devant tre
KR 150/1 2866 3054 2410 1405 1005 1234 1000 dans la zone de A3. Le point de rfrence
de lenveloppe dvolution est le point din-
KR 200/1 2866 3054 2410 1405 1005 1234 1000 tersection des axes 4 et 5.
3--9 Hauptabmessungen (softwarebezogen) und Arbeitsbereich des KR 125/1, 150/1, 200/1
Principal dimensions (software values) and working envelope of the KR 125/1, 150/1, 200/1
Dimensions principales (se rapportant au logiciel) et enveloppe dvolution du
KR 125/1, 150/1, 200/1
32 Spez KR 125, 150, 200 de/en/fr 03.96.00
Ansicht Z siehe Bild 3--9
View Z see figure 3--9
Vue Z voir figure 3--9
Befestigungsbohrungen fr Zusatzlast.
Attachment holes for supplementary load.
Trous de fixation des charges supplmentaires.
Auflage fr Zusatzlast (2x).
Support brackets for supplementary load.
Support pour la charge supplmentaire.
Motorseite
Motor side
Ct moteur
Handseite
M12 (4x) Wrist side
24 tief Ct poignet
24 deep
24 prof.
Grtma fr Zusatzlast.
Maximum size for supplementary load.
Encombrement max. pour la charge supplmentaire.
Strkante Zusatzlast.
Protruding edge of supplementary load.
Bord perturbateur de la charge supplmentaire.
03.96.00 Spez KR 125, 150, 200 de/en/fr 33
Lieferprogramm Product range Gamme de fabrication
Industrieroboter Industrial robots Robots industriels
Gelenk-- und Portalroboter fr Traglasten Jointed--arm and gantry robots for paylo- Robots polyarticuls et robots porti-
von 6 bis ber 240 kg und unterschied- ads from 6 kg (13 lbs) to more than 240 kg ques conus pour des charges nomi-
lichste Anwendungen. Lineareinheiten. (530 lbs) and a broad spectrum of applica- nales comprises entre 6 et plus de 240
Software. tions. Linear units. Software. kg dans des applications des plus di-
verses. Units linaires. Logiciel.
Roboterzellen Robotic cells
Punkt-- und Bahnschweien, Laser- Spot and arc welding, laser welding and Cellules robotises
schweien und --schneiden, Kleben und cutting, bonding and sealing, machine ten- Soudage par points et larc, soudage
Dichten, Beschicken, Stapeln, Bearbei- ding, racking, machining, inspecting. et dcoupage au laser, encollage et
ten, Prfen. Special welding systems tanchification, chargement, palettisa-
Sonderschweiverfahren Friction welding, Magnetarc welding. tion, usinage, contrle.
Reibschweien, Magnetarc--Schweien. Welding transfer lines Procds de soudage spciaux
Schwei-- Transferanlagen Spot and arc welding. Soudage par friction, soudage Magne-
Punkt-- und Bahnschweien. tarc.
Assembly systems
Montagesysteme Engine and power train assembly, trim and Lignes transfert de soudage
Aggregate--Montage, Fahrzeug--End- final assembly, bonding and sealing. Soudage par points et larc.
montage, Kleb-- und Dichttechnik. Tools Systmes dassemblage
Werkzeuge Cutting and forming tools for chipless ma- Assemblage de sous--ensembles, as-
Schneid-- und Umformwerkzeuge fr die nufacturing. semblage final, encollage et tanchifi-
spanlose Fertigung. cation.
Outils
Outils de dcoupe et de formage, pour
la fabrication sans enlvement de co-
peaux.
Anschriften Addresses Adresses
KUKA Schweissanlagen GmbH KUKA Automatisering KUKA Svetsanlggningar
Postfach 43 13 49 + Robots N.V. + Robotar AB
D--86073 Augsburg Meerstraat 41 E A Rosengrens Gata 22
Blcherstrasse 144 Industrieterrein Centrum Zuid S--42131 Vstra Frlunda
D--86165 Augsburg B--3530 Houthalen (31) 45 08 90
(0821) 797--0 (11) 52 50 50, 52 50 51 Fax (31) 45 08 96
Fax (0821) 797--1991 Fax (11) 52 67 94
KUKA Roboter GmbH KUKA Sistemas de KUKA-- VAZ Engineering
Blcherstrasse 144 Automatizacin, S.A. Ruland
D--86165 Augsburg Pol. Industrial Torrent de la Pastera 445633 Togliatti
(0821) 797--0 Carrer del Bages s/n Jushnoje Chaussee, 36 VAZ, PTO
Fax (0821) 797--1616 E--08800 Vilanova i La Geltr (Barcelona) (8482) 39 12 49, 37 05 64
(3) 8 14 23 53 Fax (8482) 39 12 49
Fax (3) 8 14 29 50 Tx 214 106
KUKA Werkzeugbau KUKA Automatisme KUKA Welding Systems
Schwarzenberg GmbH + Robotique S..r.L. + Robot Corp.
Postfach 56 1, Rue Blaise Pascal 6600 Center Drive
D--08331 Schwarzenberg F--91380 Chilly Mazarin Sterling Heights
Weidauerstrasse 15 (1) 69 09 03 93 Michigan 48312 USA
D--08340 Schwarzenberg Fax (1) 69 09 00 05 (810) 7 95 -- 20 00
(03774) 53--0 Fax (810) 9 78 -- 04 29
Fax (03774) 53--222
LSW Maschinenfabrik GmbH KUKA Sistemi di Saldatura KUKA Welding Systems
Postfach 75 06 65 + Robot s.r.l. + Robot Ltd.
D--28726 Bremen Via Camerana, 23 Hereward Rise
Uhthoffstrasse 1 I--10095 Grugliasco / Torino Halesowen
D--28757 Bremen (11) 4 11 29 66, 4 11 03 75 West Midlands B62 8AN GB
(0421) 6602--0 Fax (11) 4 11 16 45 (121) 5 85 08 00
Fax (0421) 6602--199 Fax (121) 5 85 09 00
Technische nderungen vorbehalten.
berreicht durch Subject to technical alterations.
Handed over by Sous rserve de modifications techniques.
Remis par
Das könnte Ihnen auch gefallen
- KR C4 Interbus 10 de PDFDokument69 SeitenKR C4 Interbus 10 de PDFNicolas RomeroNoch keine Bewertungen
- Roboter FacharbeitDokument20 SeitenRoboter Facharbeitaleksaljilja100100% (1)
- KST ArcTech Basic 15 deDokument119 SeitenKST ArcTech Basic 15 deayxworks eurobotsNoch keine Bewertungen
- Spez KR 125-2 enDokument48 SeitenSpez KR 125-2 enMindaugas RimkusNoch keine Bewertungen
- kr125 2Dokument1 Seitekr125 2Nahuel RmNoch keine Bewertungen
- VKRC Prog 54 deDokument420 SeitenVKRC Prog 54 deLevy Faria GiembinskyNoch keine Bewertungen
- LazyCAM Pro 3.0 HandbuchDokument78 SeitenLazyCAM Pro 3.0 HandbuchVương Thành ĐôNoch keine Bewertungen
- 00111593VW V24Dokument53 Seiten00111593VW V24Naida Dacic100% (1)
- Vortrag KRLDokument92 SeitenVortrag KRLEugénio CarvalhoNoch keine Bewertungen
- Digitale Schnittstellen Und Bussysteme: Grundlagen Und Praktische Hinweis Zur Anbindung Von Feldgeräten TaschenbuchDokument88 SeitenDigitale Schnittstellen Und Bussysteme: Grundlagen Und Praktische Hinweis Zur Anbindung Von Feldgeräten TaschenbuchShiva Sai BuraNoch keine Bewertungen
- KUKA - Sim Quick GuideDokument12 SeitenKUKA - Sim Quick GuideHernan Lopez100% (1)
- CAT LR Hauptkatalog de 01-2018 OTT PDFDokument172 SeitenCAT LR Hauptkatalog de 01-2018 OTT PDFlucasbianch11310% (1)
- B-82974GE - 04 R-30iB Plus R-30iB Mate Plus STEUERUNG Ethernet-Funktion BEDIENUNGSHANDBUCHDokument264 SeitenB-82974GE - 04 R-30iB Plus R-30iB Mate Plus STEUERUNG Ethernet-Funktion BEDIENUNGSHANDBUCHRoland LeutholdNoch keine Bewertungen
- Mess A: Datenspeichereinheit DSE 3240Dokument20 SeitenMess A: Datenspeichereinheit DSE 3240Calin CornelNoch keine Bewertungen
- Mecanico-TM CTX510 Eco NC FEF000-001-002 DE 000Dokument180 SeitenMecanico-TM CTX510 Eco NC FEF000-001-002 DE 000Miliano FilhoNoch keine Bewertungen
- Spez KR C1 06 enDokument22 SeitenSpez KR C1 06 enafonsomoutinhoNoch keine Bewertungen
- SA Modbus Ecotronic 0111Dokument20 SeitenSA Modbus Ecotronic 0111Сергей ГригоровичNoch keine Bewertungen
- Dimensiones GeneralesDokument46 SeitenDimensiones Generalesrpicho100% (1)
- Fronius - Rob 4000 5000 PDFDokument50 SeitenFronius - Rob 4000 5000 PDFDavid Santos100% (1)
- Kuka KR30L16-2 Specs PDFDokument50 SeitenKuka KR30L16-2 Specs PDFluis fernandoNoch keine Bewertungen
- KST UserTech 30 deDokument75 SeitenKST UserTech 30 deFlow89Noch keine Bewertungen
- PROFINET Projektierungshinweise Kuka Work Visual - V3.X - V2Dokument151 SeitenPROFINET Projektierungshinweise Kuka Work Visual - V3.X - V2Рафаэл ГумбатовNoch keine Bewertungen
- Kss 82 83 Cread Cwrite deDokument69 SeitenKss 82 83 Cread Cwrite deNicolas Romero100% (1)
- KUKA ProfiNet 33 deDokument93 SeitenKUKA ProfiNet 33 deosmar santiagoNoch keine Bewertungen
- LS4 Laser Scanner 3SF7834-6PB00Dokument138 SeitenLS4 Laser Scanner 3SF7834-6PB00TetsusaigaNoch keine Bewertungen
- 099 004704 Ewm01Dokument104 Seiten099 004704 Ewm01manuNoch keine Bewertungen
- 04 PST6xxx.201 D0Dokument36 Seiten04 PST6xxx.201 D0jmmNoch keine Bewertungen
- Beamicon2 CncPod2 - InstallationDokument6 SeitenBeamicon2 CncPod2 - InstallationfarowarezNoch keine Bewertungen
- 3HAC032104 OM RobotStudio-DeDokument674 Seiten3HAC032104 OM RobotStudio-DeMolitorisz AndorNoch keine Bewertungen
- Unisoud - LT200 - 400 - 600 - алгоритм поиска неисправности PDFDokument41 SeitenUnisoud - LT200 - 400 - 600 - алгоритм поиска неисправности PDFigormarkesNoch keine Bewertungen
- 000 - B3.40.02.14.06 - PRL - Roboter - Scansonic ALO3 - V01.01-RuDokument17 Seiten000 - B3.40.02.14.06 - PRL - Roboter - Scansonic ALO3 - V01.01-RushrusNoch keine Bewertungen
- Fronius Profibus Operating InstructionsDokument121 SeitenFronius Profibus Operating Instructionsfronius133Noch keine Bewertungen
- krc2 Nachruestsatz sbm2 deDokument40 Seitenkrc2 Nachruestsatz sbm2 deJar Za ArNoch keine Bewertungen
- Plano Eléctrico Kuka krc2Dokument45 SeitenPlano Eléctrico Kuka krc2Omar Gerardo Sida Lopez100% (1)
- Anleitung Debian 9 Mesa Ethernet 7i76e + LinuxCNCDokument37 SeitenAnleitung Debian 9 Mesa Ethernet 7i76e + LinuxCNCPeter DamerauNoch keine Bewertungen
- Psi63c0 761Dokument88 SeitenPsi63c0 761Rafael Luiz GiliNoch keine Bewertungen
- B-83494ge - 06 LR Mate 200id Arc Mate 50idDokument135 SeitenB-83494ge - 06 LR Mate 200id Arc Mate 50idbmeshakirNoch keine Bewertungen
- Integra Training Safety ProgrammingEN - V50.02Dokument115 SeitenIntegra Training Safety ProgrammingEN - V50.02Venypierre ParraNoch keine Bewertungen
- Monforts Programming 3Dokument89 SeitenMonforts Programming 3Mirko JovicNoch keine Bewertungen
- 100U s5 Cpu103Dokument550 Seiten100U s5 Cpu103Christian KonopkeNoch keine Bewertungen
- DA 69T V3.6 GermanDokument332 SeitenDA 69T V3.6 GermanMichael HolzheuNoch keine Bewertungen
- R911326539 10 Diagnose PDFDokument736 SeitenR911326539 10 Diagnose PDFRavindra Maraweera100% (2)
- PDL2 - DDokument484 SeitenPDL2 - DLeonardo Marinho100% (1)
- 810 M-D FuktionshandbuchDokument452 Seiten810 M-D FuktionshandbuchMirza SoftićNoch keine Bewertungen
- Cci D 11Dokument9 SeitenCci D 11Dario BeltramoNoch keine Bewertungen
- Serviceanleitung TNC 145Dokument47 SeitenServiceanleitung TNC 145AlMol100% (2)
- TNMS-M Hit 7060 LCT UserManual 3Dokument184 SeitenTNMS-M Hit 7060 LCT UserManual 3Sarwar Muhammad100% (2)
- Änderungsinformation: Steuerung Sigma Control BasicDokument28 SeitenÄnderungsinformation: Steuerung Sigma Control BasicEvandro Jva compressoresNoch keine Bewertungen
- Aprenda Como Realizar La Calibración de Cuerpo de Aceleración Electrónico Sin Scanner Paso A Paso 26533Dokument38 SeitenAprenda Como Realizar La Calibración de Cuerpo de Aceleración Electrónico Sin Scanner Paso A Paso 26533JaimeNoch keine Bewertungen
- KR 150 2 en Esp TecDokument68 SeitenKR 150 2 en Esp TecMarko KNoch keine Bewertungen
- Kr6 16l6 Arc de en FRDokument33 SeitenKr6 16l6 Arc de en FRFilipe SilvaNoch keine Bewertungen
- KR 100 2 PA en ESP TEC PDFDokument33 SeitenKR 100 2 PA en ESP TEC PDFDaniel DumitruNoch keine Bewertungen
- Spez KR16Dokument47 SeitenSpez KR16Elif Nur YücelNoch keine Bewertungen
- Kuka KR6Dokument36 SeitenKuka KR6Dani OxteNoch keine Bewertungen
- Spez KR 3 enDokument23 SeitenSpez KR 3 enVictorNoch keine Bewertungen
- REXROTH eLINE - REX Voziky PDFDokument20 SeitenREXROTH eLINE - REX Voziky PDFMarian ZatkoNoch keine Bewertungen
- KR C1 A - KUKA RoboticsDokument30 SeitenKR C1 A - KUKA RoboticsSuleymen MeymouniNoch keine Bewertungen
- AuswuchtenDokument20 SeitenAuswuchtenmrtxaNoch keine Bewertungen
- Spez krc1 de en FRDokument29 SeitenSpez krc1 de en FRLevy Faria GiembinskyNoch keine Bewertungen
- Kuka Robot Ro - El - 03 - 52 - 01 - deDokument31 SeitenKuka Robot Ro - El - 03 - 52 - 01 - deelmacuarro5Noch keine Bewertungen