Das könnte Ihnen auch gefallen
- Konst I WS0708 GesamtDokument39 SeitenKonst I WS0708 GesamtsabatinNoch keine Bewertungen
- Prec Eq-TedDokument12 SeitenPrec Eq-TedHaris BešićNoch keine Bewertungen
- Elektrotechnik 2 SampleDokument5 SeitenElektrotechnik 2 SampleCarlos CalvoNoch keine Bewertungen
- Projekt 1 DieselmotorDokument9 SeitenProjekt 1 DieselmotorChanbaek Taoris KaisooNoch keine Bewertungen
- ZahnradgetriebeDokument146 SeitenZahnradgetriebeHammergeroNoch keine Bewertungen
- Der Standschub Von Propellern Und Rotoren (Helmut Schenk, Ebook, 2002)Dokument24 SeitenDer Standschub Von Propellern Und Rotoren (Helmut Schenk, Ebook, 2002)martin_fischer_hro100% (2)
- SIRM Paper35Dokument10 SeitenSIRM Paper35salkan_rahmanovic810Noch keine Bewertungen
- Drehstromantriebe: GrundlagenDokument90 SeitenDrehstromantriebe: GrundlagenKaloyan IvanovNoch keine Bewertungen
- KrahnbanDokument9 SeitenKrahnbanOkanSukruNoch keine Bewertungen
- Bogenzahn Kupplungen TurbobaureihenDokument32 SeitenBogenzahn Kupplungen TurbobaureihenropmachadoNoch keine Bewertungen
- Ansys Ubung FEM SchrumpfsitzDokument17 SeitenAnsys Ubung FEM SchrumpfsitzmehdilaserNoch keine Bewertungen
- ZF - Getriebedimensionierung Für Mobile ArbeitsmaschinenDokument11 SeitenZF - Getriebedimensionierung Für Mobile Arbeitsmaschinengs1100Noch keine Bewertungen
- 20029984D0997 LDokument12 Seiten20029984D0997 LBang OchimNoch keine Bewertungen
- Technisches Datenblatt T153Dokument36 SeitenTechnisches Datenblatt T153Ako BogdaNoch keine Bewertungen
- Versuch 01Dokument29 SeitenVersuch 01michajan4274Noch keine Bewertungen
- EP1704929B1Dokument12 SeitenEP1704929B1Syazwan AceNoch keine Bewertungen
- Aufgabenstellung Baugruppenentwurf 23-24Dokument6 SeitenAufgabenstellung Baugruppenentwurf 23-24Cemil KabakNoch keine Bewertungen
- GetriebeDokument7 SeitenGetriebeblurbNoch keine Bewertungen
- Sinus-S40 Komplet DEDokument21 SeitenSinus-S40 Komplet DEDamirNoch keine Bewertungen
- Reifen ATZDokument6 SeitenReifen ATZol4voNoch keine Bewertungen
- DE Vienna Motor Symposium PresentationDokument14 SeitenDE Vienna Motor Symposium Presentationzo68Noch keine Bewertungen
- KTB Uebung 05 2023-04-18 Passfeder-Keilwelle-Auslegung ApDokument2 SeitenKTB Uebung 05 2023-04-18 Passfeder-Keilwelle-Auslegung ApSaad ChforNoch keine Bewertungen
- An Tri Ebs TechnikDokument120 SeitenAn Tri Ebs TechnikSara PotterNoch keine Bewertungen
- Fortschritt e 281 CDokument140 SeitenFortschritt e 281 CImbunatatire VedereNoch keine Bewertungen
- Kapitel 5Dokument68 SeitenKapitel 5Katerina SereniciNoch keine Bewertungen
- Entwicklung 50ccm 8PS-10PS Mit 2 Stroke CalcDokument18 SeitenEntwicklung 50ccm 8PS-10PS Mit 2 Stroke Calchuj89100% (1)
- G2000 de GB FR 2805Dokument104 SeitenG2000 de GB FR 2805antonio_holguin_2Noch keine Bewertungen
- Zugöse BetriebsanleitungDokument2 SeitenZugöse BetriebsanleitungChristian AttenbergerNoch keine Bewertungen
- DIN 1045-1 Примечания. Erlaeuterungen DAfStb Heft 525 Ber-1 2005-05Dokument11 SeitenDIN 1045-1 Примечания. Erlaeuterungen DAfStb Heft 525 Ber-1 2005-05RomanNoch keine Bewertungen
- Dokumentation INTO.14.115.06.1.1 deDokument28 SeitenDokumentation INTO.14.115.06.1.1 defesterrNoch keine Bewertungen
- 2015 Sample QPDokument22 Seiten2015 Sample QPArjun SankarNoch keine Bewertungen
- Stabilität und Parametrierung: Kompendium Simulation und Regelung technischer Prozesse, Teil 12Von EverandStabilität und Parametrierung: Kompendium Simulation und Regelung technischer Prozesse, Teil 12Noch keine Bewertungen
- Grundlagen Für Die AuslegungDokument35 SeitenGrundlagen Für Die Auslegungqtang123_269609815Noch keine Bewertungen
- Schue TT Gutta Gung 2004Dokument22 SeitenSchue TT Gutta Gung 2004Sergio LamanaNoch keine Bewertungen
- CFturbo NUMET 2010 PDFDokument46 SeitenCFturbo NUMET 2010 PDFCarlos HerreraNoch keine Bewertungen
- DrehzahlDokument10 SeitenDrehzahlMiha KuharNoch keine Bewertungen
- 02 - Handout Achsen Und Wellen MEL 307.451 2013 WSDokument28 Seiten02 - Handout Achsen Und Wellen MEL 307.451 2013 WSLuka VartušekNoch keine Bewertungen
- Analyse Des Tribosystems Bremsscheibe - Belag Mit Hilfe Der SchallemissionsanalyseDokument8 SeitenAnalyse Des Tribosystems Bremsscheibe - Belag Mit Hilfe Der SchallemissionsanalyseAtef NazNoch keine Bewertungen
- Kupplungsauslegung Nach DIN 740Dokument7 SeitenKupplungsauslegung Nach DIN 740amaze303Noch keine Bewertungen
- BMW Zweiventiler Rep AnleitungDokument216 SeitenBMW Zweiventiler Rep AnleitungSven RemshagenNoch keine Bewertungen
- Projekt 8.0 Antriebssysteme Auswählen Und IntegrierenDokument70 SeitenProjekt 8.0 Antriebssysteme Auswählen Und IntegrierenAnthony Hatfield100% (1)
- Vorlesung Bremstechnik 2007Dokument34 SeitenVorlesung Bremstechnik 2007scorch2Noch keine Bewertungen
- BOSCH Wischanlagen Für NFZDokument54 SeitenBOSCH Wischanlagen Für NFZBoris Urlbauer100% (1)
- Ermittlung Der Momente Auf Eine AbsperrklappeDokument8 SeitenErmittlung Der Momente Auf Eine AbsperrklappeMaxx K. Hong ChewNoch keine Bewertungen
- Uebung 5Dokument3 SeitenUebung 5Mambo JamboNoch keine Bewertungen
- Fahrwiderstände des Kraftfahrzeugs: Luft- und Rollwiderstandsermittlung im FahrversuchVon EverandFahrwiderstände des Kraftfahrzeugs: Luft- und Rollwiderstandsermittlung im FahrversuchNoch keine Bewertungen
- Heynau H-Trieb Katalog PDFDokument51 SeitenHeynau H-Trieb Katalog PDFjesuNoch keine Bewertungen
- Heynau H-Trieb Katalog PDFDokument51 SeitenHeynau H-Trieb Katalog PDFjesuNoch keine Bewertungen
- BREVINI Industrial SeriesDokument214 SeitenBREVINI Industrial SeriesEsra YansenNoch keine Bewertungen
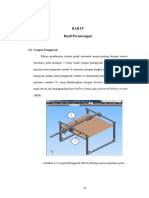
- BAB 4 SkripsiDokument24 SeitenBAB 4 Skripsiangger krisnaNoch keine Bewertungen
- Technische Daten 1.1. Allgemeingültige Technische Daten Für Die Typen S51 Und S70Dokument12 SeitenTechnische Daten 1.1. Allgemeingültige Technische Daten Für Die Typen S51 Und S70sola5Noch keine Bewertungen
- Auslegung Pumpen 2015Dokument40 SeitenAuslegung Pumpen 2015Carlos HyldenNoch keine Bewertungen
- Manual 366 PDFDokument310 SeitenManual 366 PDFCharles Henrique Michalak100% (1)
- 5HP24 AdDokument78 Seiten5HP24 AdЙордан Димитров100% (3)
- EP0818643A2 - Split-Torque Hydromechanical TransmissionDokument9 SeitenEP0818643A2 - Split-Torque Hydromechanical TransmissionYundi GaoNoch keine Bewertungen
- Zahnbruchsicherheit 6Dokument62 SeitenZahnbruchsicherheit 6The EntertainerNoch keine Bewertungen
- Zahnbruchsicherheit 4Dokument62 SeitenZahnbruchsicherheit 4The EntertainerNoch keine Bewertungen
- Triebwerksdynamik und Konstruktionselemente des VerbrennungsmotorsVon EverandTriebwerksdynamik und Konstruktionselemente des VerbrennungsmotorsNoch keine Bewertungen
- Eine Hybride von Drehkolbenmotor und Turbine mit riesigem SynergieeffektVon EverandEine Hybride von Drehkolbenmotor und Turbine mit riesigem SynergieeffektNoch keine Bewertungen
- Pneumatische Förderung: Grundlagen, Auslegung und Betrieb von AnlagenVon EverandPneumatische Förderung: Grundlagen, Auslegung und Betrieb von AnlagenNoch keine Bewertungen
- Qualität Im (Hyper) Lokalen BürgerjournalismusDokument40 SeitenQualität Im (Hyper) Lokalen Bürgerjournalismuslesen_netNoch keine Bewertungen
- Oevermann, Ulrich: Freud (1975)Dokument13 SeitenOevermann, Ulrich: Freud (1975)Randy MckinneyNoch keine Bewertungen
- VL3 Kapitel2 Teil2 WS21 22Dokument54 SeitenVL3 Kapitel2 Teil2 WS21 22zzgNoch keine Bewertungen
- Keplersche GesetzeDokument5 SeitenKeplersche GesetzeCharlotte LehmannNoch keine Bewertungen